小型直驱式永磁同步风力发电机快速最大功率追踪仿真研究
2016-10-14 15:13冯承超
电力系统保护与控制 2016年5期
刘 丹,李 强,冯承超
小型直驱式永磁同步风力发电机快速最大功率追踪仿真研究
刘 丹,李 强,冯承超
(南京理工大学自动化学院,江苏 南京 210094)
直驱式永磁同步发电系统的功率输出直接受发电机转速的影响。为了提高小型直驱式永磁同步发电系统的输出功率,通过分析风力机的工作特性以及最大功率追踪原理,指出经典爬山法的缺点,并提出一种新的变步长爬山法。根据前一次转速扰动和功率变化的梯度关系来决定下一次的扰动步长,可以提高系统的动态响应,扰动方向与经典爬山法一致。在最大功率点附近,功率波动小于一定值时,停止搜索,来实现最大功率追踪的快速性和稳定性。用仿真结果验证了该方法的可行性。
直驱式;风力发电;永磁同步发电机;爬山法;梯度式变步长
0 引言
环境和能源问题逐渐成为制约社会发展的主要问题。风能清洁,并且可再生,必定会在接下来的社会建设中发挥主要作用[1-3]。直驱式风电机组,风力机和发电机直接相连,相较于双馈风机,省去了齿轮箱,能节约成本,减少维护[4-5]。但是由于风能利用的不稳定性,给风力发电再来了很多制约。因此最大功率追踪技术(MPPT)的研究变得尤为重要。最大功率追踪技术可以使得风能最大限度转换成电能[6-9]。
关于最大功率追踪算法,国内外已经有大量的研究,可以分为两类,第一类是最优曲线法,第二类是寻优法,也叫爬山法、黑箱法[10-13]。第一类算法中典型的代表有:最佳叶尖速比法、功率信号反馈法、最佳转矩法。这类算法虽然可以快速精准地使发电机运行在最大功率点,但是该类算法需要安装测风装置,需要明确知道风力机的参数,这样就会增加系统成本,而且对测风装置的准确度要求较高。第二类算法中典型的代表有定步长爬山法和变步长爬上法。这种算法不需要测风装置,减小了机组成本,但是在最大功率点附近会有波动,会引起系统震荡。此外,由于转动惯量的影响,第一类算法比较适合应用于转动惯量大的大型机组;第二类算法比较适合应用于与转动惯量小的小型风电机组。本文在分析了经典爬山法的缺点的基础上,提出一种新的变步长算法,并在Matlab/Similink软件搭建直驱式永磁同步风力发电系统模型,仿真结果证明,新算法能快速稳定地追踪到最大功率点。
1 风力机的工作特性
风力是风能转换成机械能的重要装置,获取风能的能力是衡量风力机性能的重要指标。风力机的工作特性如下

其中,
(2)
(4)
2 最大功率追踪原理
根据贝茨理论,p的极限值是0.593。为了使风力机捕获尽可能多的风能,提高风力机的机械效率,应尽可能使p的值保持最大。由式(2)可知,当桨距角一定的时候,p是的函数,也就是存在一个使得p最大,这个值我们称之为最佳叶尖速比。而由式(3)可知在风速和风轮半径一定的情况下又是转速的单调函数,这就说明在一定风速下,存在一个最佳的转速使得p的值最大,而所谓的最大功率追踪就是在一定的风速下控制发电机运行在合适的转速使得风能尽可能地转化为机械能,进而转换成电能,提高能源的利用率。
2.1 经典爬山法
前言中,爬山法比较适合运用在转动惯量小的风电机组,因此小型风力机大多采用此类控制算法。下面我们介绍经典的固定步长的爬山法。爬山法的具体思想是:由于盲人无法看到周围的环境,要想上山只能依仗手中的拐杖去试探,若试探到身边某一方向比较高时则前行,否则继续换方向试探。只要找到更高的方向则前进,否则原地不动,停止寻找,当前位置为最高位置,算法终止。结合图1说明爬山法的具体步骤。

图1风力机某一风速下转速和输出功率的关系
在某一个风速下,功率和转速的关系类似抛物线,我们可以给转速施加扰动,从转速和功率的变化来决定下一个时刻的转速扰动量,直到找到最大的功率点。判断条件一般分为四种情况。和分别代表第时刻和1时刻的转速,和代表的是和1时刻的功率。
使用固定步长爬山法最终的结果是机组运行在最大功率点附近,存在波动。
2.2 梯度式变步长爬山法
由上文分析可知,经典爬山法存在一定的缺陷,比如,固定步长扰动势必造成刚开始扰动慢,而在接近最大功率点附近的时候又会有较大的波动。怎么样又快又稳地追踪到机组运行的最佳工作点成为近年来研究人员研究的热点。
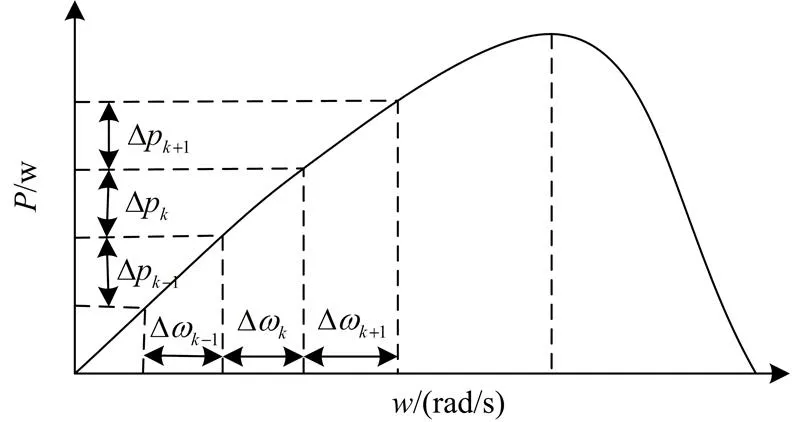
图2 梯度式变步长爬山法扰动示意图
在追踪最大功率点的时候,功率的变化逐渐减小,转速的扰动也逐渐减小,在最大功率点附近,接近于零,当功率的波动小于某一阀值,等于零,停止扰动,就能更快更稳定地追踪到最大功率点。
3 仿真研究
3.1 仿真模型的搭建
为了验证上述算法的有效性和优越性,我们根据图3的系统结构图在Matlab/Simulink搭建1 kW的小型直驱式永磁同步风力发电系统。
如图所示,主电路在图中虚线内,控制模块在虚线外。
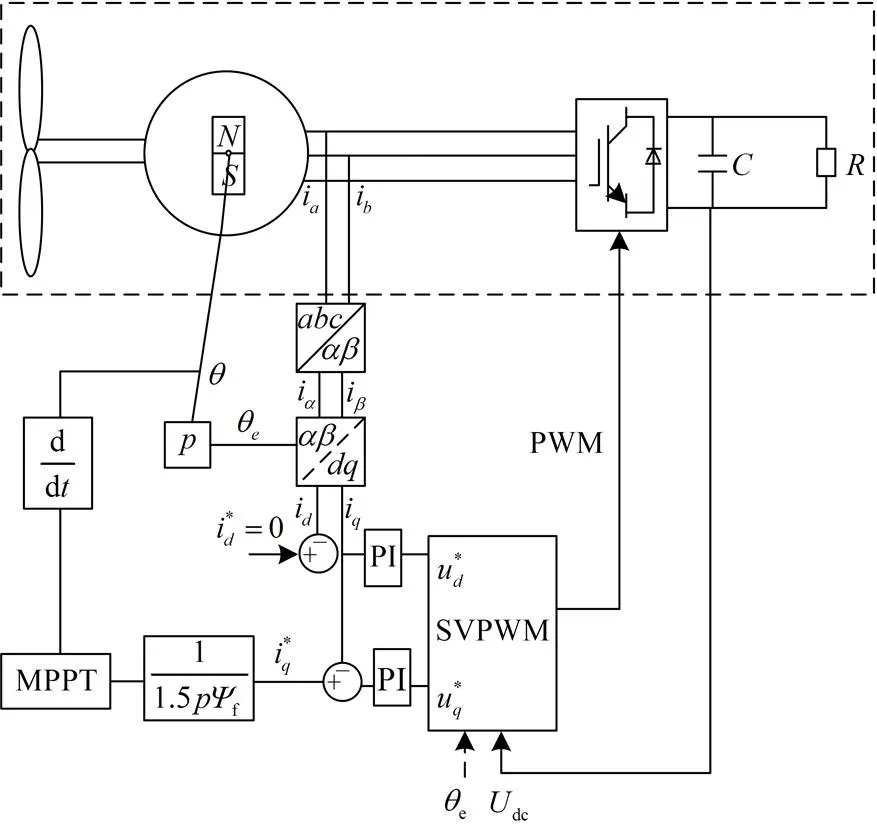
图3 系统主电路及其控制策略
3.2 仿真结果分析
0~1 s风速为9 m/s,1 s的时候风速阶跃到11 m/s,直到2 s仿真结束。
图4~图8是仿真结果。
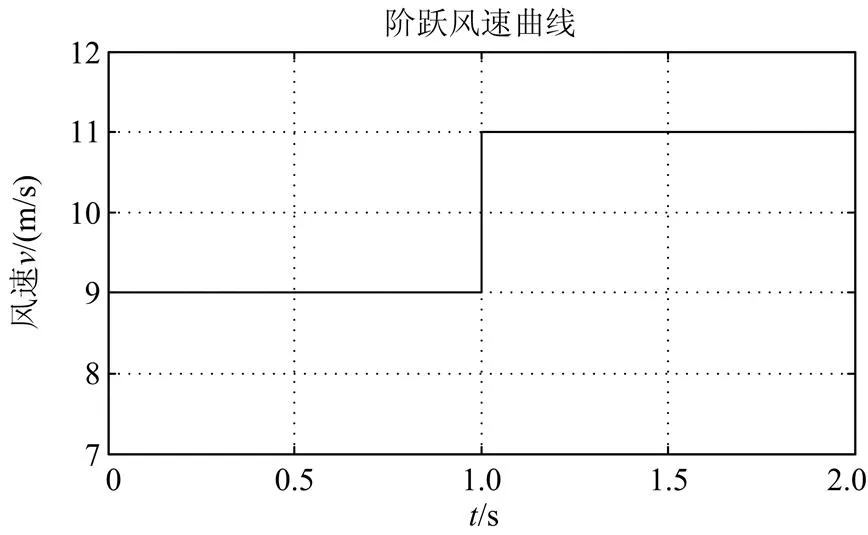
图4 风速阶跃变化示意图

图5 固定步长爬山法Cp值
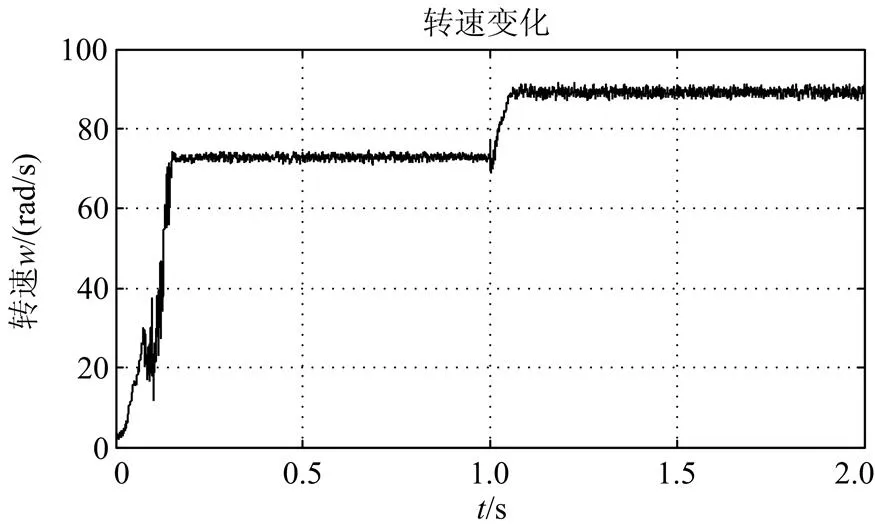
图6 固定步长爬上法转速变化示意图
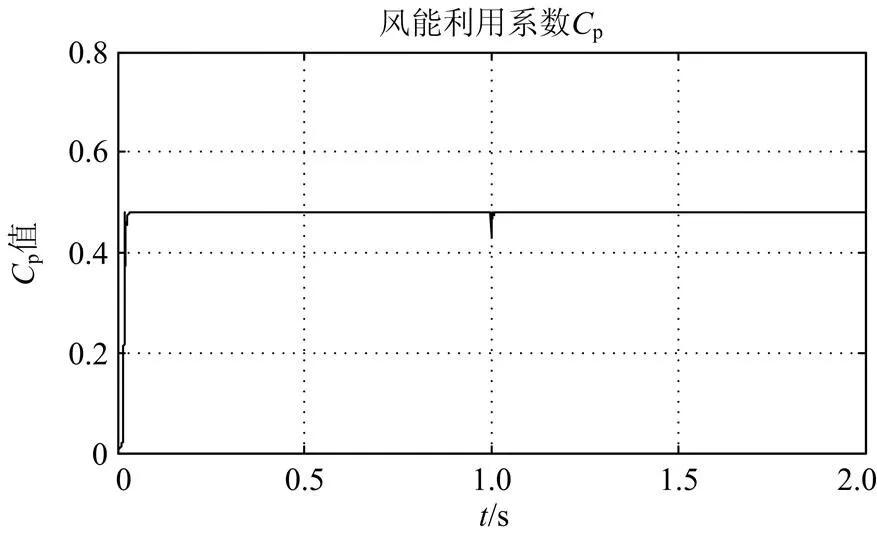
图7 梯度式变步长爬山法Cp值
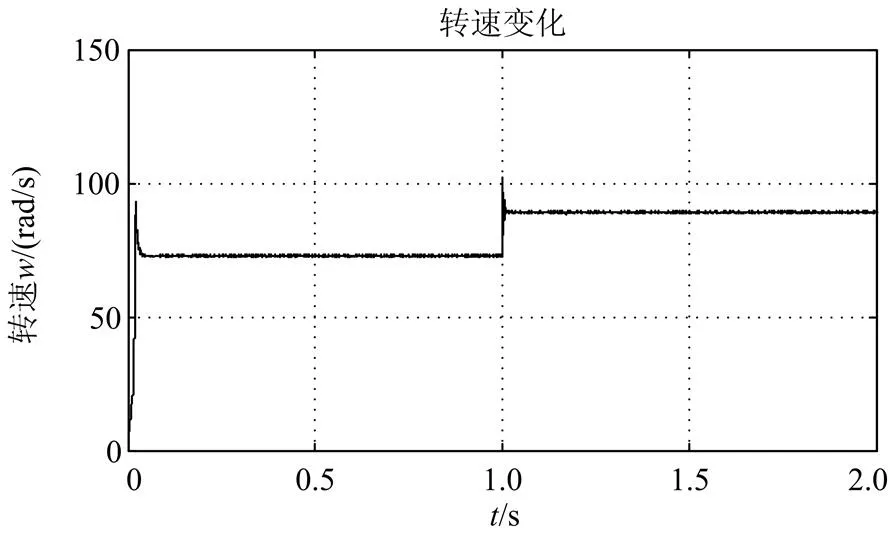
图8 梯度式变步长爬上法转速变化示意图
由仿真图可知,虽然两种算法都可以追踪到最佳的功率运行点,但是固定步长算法的转速波动非常明显,而且追踪到最大功率点的时间也比较慢,而梯度式变步长算法不但很快地追踪到最大功率运行点,而且转速波动小。说明新算法有效且优于固定步长法。
4 结论
经过对风力机工作原理的分析,说明了风电系统最大功率追踪的原理,并针对小型风力发电系统固定爬山法的不足,提出一种新的梯度式变步长的爬山法,搭建Matlab/Simulink实验模型,进行稳态和动态的仿真,证明了新算法的有效性和优越性。
[1] 张小莲, 李群, 殷明慧, 等. 一种引入停止机制的改进爬山算法[J]. 中国电机工程学报, 2012, 32(14): 128-134.
ZHANG Xiaolian, LI Qun, YIN Minghui, et al. An improved hill-climbing searching method based on halt mechanism[J]. Proceedings of the CSEE, 2012, 32(14): 128-134.
[2] 杨勇, 朱彬彬, 赵方平, 等. 一种电流预测控制的自适应变步长最大功率跟踪方法[J]. 中国电机工程学报, 2014, 34(6): 855-862.
YANG Yong, ZHU Binbin, ZHAO Fangping, et al. An adaptive and variable step MPPT method based on current predictive controllers[J]. Proceedings of the CSEE, 2014, 34(6): 855-862.
[3] 黄炜, 刘健, 魏昊焜, 等. 分布式光伏电源极端可接入容量极限研究[J]. 电力系统保护与控制, 2015, 43(3): 22-28.
HUANG Wei, LIU Jian, WEI Haokun, et al. Extreme capacity limitations of photovoltaic generators in distribution grids[J]. Power System Protection and Control, 2015, 43(3): 22-28.
[4] 刘爱国, 薛云涛, 胡江鹭, 等. 基于GA优化SVM的风电功率的超短期预测[J]. 电力系统保护与控制, 2015, 43(2): 90-95.
LIU Aiguo, XUE Yuntao, HU Jianglu, et al.Ultra-short- term wind power forecasting based on SVM optimized by GA[J].Power System Protection and Control, 2015, 43(2): 90-95.
[5] 陈家伟, 周荔丹, 姚钢, 等. 全开放式双馈风力发电实验平台的研究[J]. 电力系统保护与控制, 2015, 43(10): 104-110.
CHEN Jiawei, ZHOU Lidan, YAO Gang, et al. Study on full-open experiment platform for DFIG wind power generation[J].Power System Protection and Control, 2015, 43(10): 104-110.
[6] 茅靖峰, 吴爱华, 吴国庆, 等. 基于扩张状态观测的永磁直驱风力发电系统MPPT自适应滑模控制[J]. 电力系统保护与控制, 2014, 42(18): 58-65.
MAO Jingfeng, WU Aihua, WU Guoqing, et al. Extended state observer MPPT permanent magnet direct drive wind power generation system based on adaptive sliding mode control[J]. Power System Protection and Control, 2014, 42(18): 58-65.
[7] 沈建新, 缪冬敏. 变速永磁同步发电机系统及控制策略[J]. 电工技术学报, 2013, 28(3): 1-8.
SHEN Jianxin, MIAO Dongmin. Variable speed permanent magnet synchronous generator systems and control strategies[J]. Transactions of China Electrotechnical Society, 2013, 28(3): 1-8.
[8] 管维亚, 吴峰, 鞠平. 直驱永磁风力发电系统仿真与优化控制[J]. 电力系统保护与控制, 2014, 42(9): 54-60.
GUAN Weiya, WU Feng, JU Ping. Simulation and optimized control of direct-drive permanent magnet wind power system[J]. Power System Protection and Control, 2014, 42(9): 54-60.
[9] KSHIRSAGAR P, BURGOS R P, LIDOZZI A, et al. Implementation and sensorless vector-control design and tuning strategy for SMPM machines in fan-type applications[J]. IEEE Transactions on Industry Applications, 2012, 48(6): 2402-2413.
[10] KIM J S, SUL S K. New approach for high-performance PMSM dives without rotational position sensors[J]. IEEE Transactions on Power Electronics, 1997, 12(5): 904-911.
[11] 孙红霞, 赵彩宏. 光伏/风电并网测试装置的设计和开发[J]. 高压电器, 2014, 50(5): 103-107.
SUN Hongxia, ZHAO Caihong. Design and development of testing devices for photovoltaic/wind power grid connection[J]. High Voltage Apparatus, 2014, 50(5): 103-107.
[12] 夏长亮. 永磁风力发电系统及其功率变换技术[J]. 电工技术学报, 2012, 27(11): 1-13.
XIA Changliang. Wind energy conversion system based on PMSG and its power converter technology[J]. Transactions of China Electrotechnical Society, 2012, 27(11): 1-13.
[13] 李鹏,刘成斌,姜涛,等. 智能电网下的电网安全性与稳定性[J]. 电网与清洁能源, 2013, 29(2): 33-37.
LI Peng, LIU Chengbin, JIANG Tao, et al. Power system security and stability in smart grid[J]. Power System and Clean Energy,2013, 29(2): 33-37.
(编辑 葛艳娜)
A simulation study of small direct drive type permanent magnet synchronous generator fast maximum power tracking
LIU Dan, LI Qiang, FENG Chengchao
(School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China)
Output power of direct drive permanent magnet synchronous generator (PMSG) system is directly influenced by the rotational speed of generator. In order to improve the output power of small-scale direct drive PMSG, through the analysis of working characteristics of wind turbine and the maximum power tracking principle, this paper points out the shortcomings of classical hill-climbing method and puts forward a new variable step hill-climbing method. Using the relationship between the speed disturbance of time and power change gradient to decide the next step disturbance can improve the system dynamic response, and the direction of disturbance is consistent with the classical hill-climbing method. In the vicinity of the maximum power point, when power fluctuation is less than a certain value, the search will be stopped to realize the quickness and stability of maximum power point tracking. Simulation results verify the feasibility of the method.
direct drive; wind power generation; permanent magnet synchronous generator; climb method; gradient variable step size method
10.7667/PSPC150723
2015-04-30;
2015-06-21
刘 丹(1991-),男,硕士研究生,主要研究方向为分布式电源与并网控制、配网自动化;E-mail: 1929736795@ qq.com 李 强(1969-),男,博士,副研究员,主要研究方向为电力电子在新能源开发中的应用、电机调速;冯承超(1990-),男,硕士研究生,主要研究方向为电机控制,新能源开发。
猜你喜欢
防爆电机(2022年1期)2022-02-16
作文成功之路·小学版(2019年12期)2020-01-19
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生导刊(2018年31期)2018-12-06
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
小主人报(2016年3期)2016-02-28
振动工程学报(2015年1期)2015-03-01
太阳能(2015年6期)2015-02-28
噪声与振动控制(2015年4期)2015-01-01