
基于双向判决反馈均衡器的水声通信海试试验研究
2016-10-14 02:15:36韩笑生雪莉殷敬伟刘冰
兵工学报 2016年3期
韩笑,生雪莉,殷敬伟,刘冰
(1.哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;2.哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001)
基于双向判决反馈均衡器的水声通信海试试验研究
韩笑1,2,生雪莉1,2,殷敬伟1,2,刘冰1,2
(1.哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;2.哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001)
将被动时间反转镜(PTRM)技术与双向判决反馈均衡器(DFE)相结合,设计并实现了高可靠性的单载波水声通信解码方案。接收端采用PTRM压缩信道多途结构,聚焦信号能量;利用双向DFE将传统DFE和反向DFE输出结果合并,进一步降低错误判决的概率,提高系统稳健性。在时不变浅海水声信道环境中,开展的水声通信试验数据处理结果表明:与传统DFE相比,双向DFE能够获得一定的处理增益,5 km、7 km和10 km通信距离上的均衡后输出信噪比分别提高了2.74 dB、2.36 dB和1.54 dB,有效改善了解码性能。
通信技术;水声通信;被动时间反转镜;双向判决反馈均衡器;稳健性
0 引言
水声信道[1-2]被认为是最复杂的无线信道,其多途扩展严重,在浅海地区可能达到几十甚至上百毫秒,导致接收端产生严重的码间干扰(ISI)。判决反馈均衡是常用的克服ISI技术,在忽略判决误差的前提下其性能远远优于线性均衡器。Stojanovic等[3]提出的内嵌锁相环的判决反馈均衡结构,可以实时跟踪海面随机起伏引起的相位跳变,加速了相干通信在水声领域的发展。尽管如此,在大多数情况下,只依靠单个水听器的接收信号仍然不足以恢复发送信息,因此由多个水听器组成的垂直接收阵开始应用于水声通信领域[4-5]。
时间反转镜技术[6-7]利用多阵元空间分集聚焦信号能量,从而减小ISI.与判决反馈均衡器(DFE)相比,时间反转镜技术计算复杂度较小,被水声学者广泛研究。Song等[8-9]提出了基于被动时间反转镜(PTRM)与DFE相结合的水声接收机结构,PTRM用于压缩信道多途结构,单通道DFE用于移除残留的ISI,取得了近乎理想的解码效果。海试数据处理结果表明其性能与多通道DFE相近[10-11]。目前,PTRM和DFE相结合技术已经成功应用于信道时变水声通信中[12],使用前一数据块的信道估计结果用于当前数据块的被动时反操作,以解决信道失配带来的问题。
然而DFE结构面临的主要问题之一是由于对信息的不正确判决而产生的错误传播。关于如何降低错误发生的概率,研究者发现DFE在抽头系数一定的前提下,正向判决(传统的均衡器)和反向判决的性能不会相同,因此提出了双向 DFE的方法[13-14]。双向DFE已经广泛应用于无线通信领域,用于降低均衡器错误传播的概率,改善传统均衡器的性能。双向DFE包括两个并行的均衡器结构:其中一个均衡器采用常规的模式对接收信号进行均衡;另一个均衡器对时反后的接收信号进行均衡。由于均衡过程中产生的突发错误是在相反的方向,具有很小的相关性,即在同一位置处两个均衡方向同时产生错误的概率很低。这种利用正向判决反馈均衡和反向判决反馈均衡之间错误传播不同的方法也可以看作是一种分集技术。
本文将基于PTRM的双向DFE应用于水声通信领域,并已进行了相关海试研究。试验数据处理结果表明:与传统的DFE相比,双向DFE能够显著改善解码性能,在5 km、7 km和10 km的通信距离上分别取得了2.74 dB、2.36 dB和1.54 dB的增益。
1 基于PTRM的双向DFE原理
图1给出了基于PTRM的双向DFE结构,主要包括两个并行的均衡器:一个常规的PTRM均衡器,即正向 DFE;一个反向的 PTRM均衡器,即反向DFE,其间通过一个时间反转器相连。正向DFE采用传统的多阵元被动时反处理,并采用单通道的DFE移除残留的ISI;反向DFE对时间反转后的接收信号进行多阵元被动时反处理,而后同样采用单通道的DFE移除残留的ISI.图1中:ri[n]第i个阵元接收到的信号,i=1,2,…,M,其中,M为阵元个数;af[n]、ar[n]分别为正向、反向前馈滤波器抽头系数;bf[n]、br[n]分别为正向、反向反馈滤波器的抽头系数分别为正向、反向和合成后的均衡器输出符号分别为正向、反向和合成后的经过判决后的符号;θf、θr分别为正向、反向锁相环实时跟踪的相位误差。
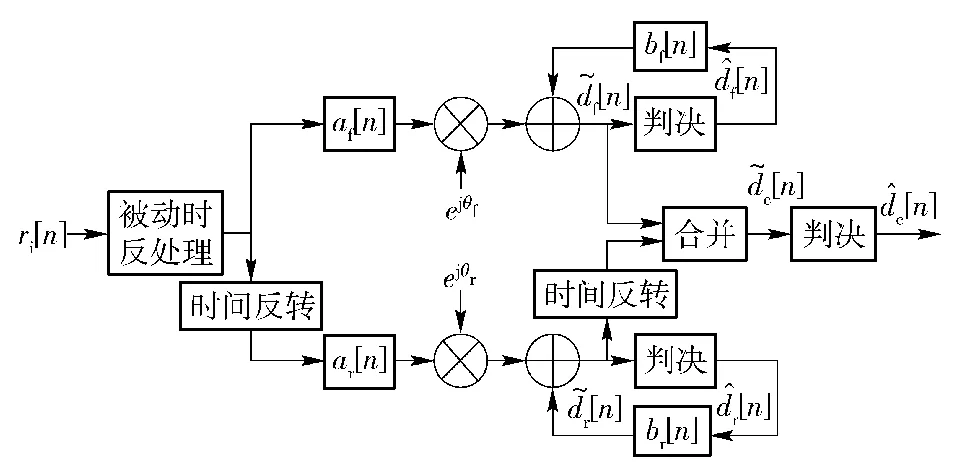
图1 基于PTRM的双向DFE结构Fig.1 Schematic diagram of bidirectional DFE based on PTRM
对于有限长的时不变水声信道hi[n],i=1,2,…,M,假设发送信息为d[n],则第i个阵元接收到的信号可表示为
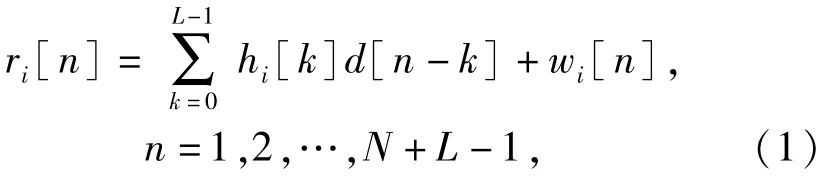
式中:L为信道的抽头个数;N为发送符号个数;w[n]为信号传输过程中的噪声干扰。经过时间反转后的接收信号可表示为
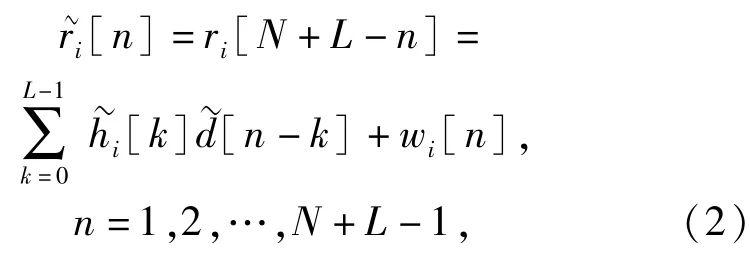
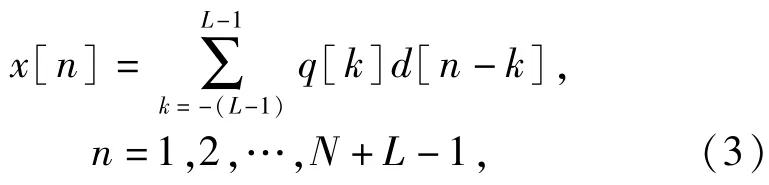
经过被动时反处理后的接收信号经过单通道的DFE移除残留的ISI,进而得到正向和反向判决反馈均衡后的符号合并器将两路符号组合并经过判决器后得到最终的输出序列,合并后的输出符号可表示为

目前,常用的合并器有两种:双向任意与双向合并。前者指在正向判决反馈均衡和反向判决反馈均衡输出结果中,任意选择一路较好的作为输出,后者是把两路结果通过合并联合输出。双向任意结构是双向合并结构的一种特殊情况,即β=0或β=1,尽管该种方法具有较强的有效性,但其要求水声信道是完全已知的,且分析较为困难。文献[15]采用使均方误差最小化的方法,即对最佳权系数β进行了相关研究,对于对称的信道结构,当β=1/2时可以得到最佳的输出结果。本文处理相关试验数据时采用β=1/2的双向DFE结构。
2 海试试验研究
2.1试验布局
在某海域进行了单载波水声通信试验,系统参数为:采样频率fs=48 kHz,载波频率f0=6 kHz,波特率为2 000 symbol/s,映射方式QPSK,数据率为4 kb/s,采用开方升余弦滤波器进行脉冲成型,滚降系数α=0.7.试验时,发送32 120 bit数据,其中,最前和最后1 000 bit数据作为训练序列(共500个符号)用于DFE系数更新。经过调制后的10阶gold序列作为同步信号,该信号同样被用作信道探测码进行被动时间反转的信道估计,图2给出了发送信号的帧结构。

图2 发送信号帧结构示意图Fig.2 Schematic diagram of transmitted signal frame
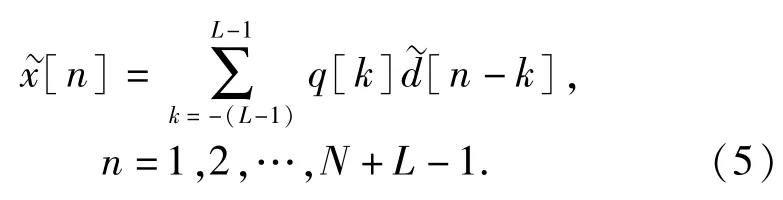
图3给出了海试试验的布局示意图。试验过程中接收船始终锚定在A点位置,5个阵元组成的垂直阵用于接收信号,阵元间距1 m.顶端阵元为P1,底端阵元为P5,其中P1距离水面4 m,因此P5位于水深8 m处;发射船先后停留在B点、C点、D点位置,3点与A点距离分别约为5 km、7 km、10 km,发射换能器频带范围2~8 kHz,声源级约186 dB,发射换能器在B点、C点、D点的吊放深度分别为6 m、11 m、13 m.试验当天风浪较大,风力约5级,浪高约0.6 m.尽管发射船和接收船锚定,但其仍随风浪有较小漂移,并且在试验过程中不断有渔船驶过,环境噪声较大。本文在数据处理时选取了海面环境较为安静时段的接收数据进行解码分析。
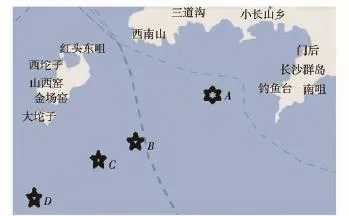
图3 海试试验布局示意图Fig.3 Layout of sea experiment conducted
2.2信道特性分析
本文所研究的双向DFE结构以在通信时间内,水声信道时不变为前提,当信道发生改变时,信道探测码估计的信道会与通信信号经过的真实信道发生失配,采用PTRM技术不仅不会产生信号能量的聚焦,反而会使信道结构更为复杂,因此对于通信时间长度内水声信道结构的研究是十分有必要的。本文利用编码信号前后的两个信道探测码对5 km、7 km 和10 km通信距离上的信道进行了研究,其中接收阵元选取P1.图4、图5和图6分别给出了相应的信道结构图,其中图4为通信距离5 km信道,图5为通信距离7 km信道,图6为通信距离10 km信道。本文用h1表示采用编码信号之前的信道探测码取得的信道估计结果;用h2表示采用编码信号之后的信道探测码取得的信道估计结果;用corr(h1,h2)表示两估计信道的互相关结果。
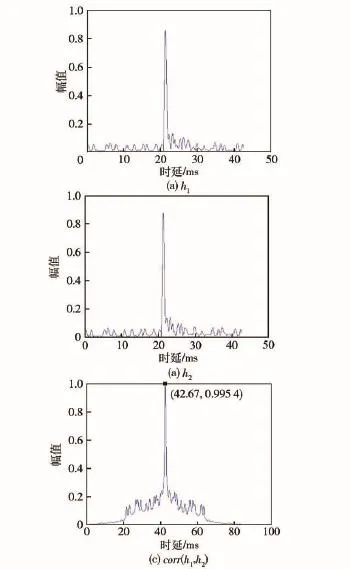
图4 通信距离5 km水声信道冲激响应Fig.4 Channel impulse responses at 5 km
从图4、图5和图6的信道估计结果可看出,3种通信距离上的信道结构都较为简单,最大多途扩展小于10 ms,信道主峰明显,旁瓣较低,接收信号能量集中。另外,本次海试试验环境较为稳定,在通信时间长度内,5 km、7 km和10 km的信道结构没有发生较大的变化,采用编码信号之前和之后信道探测码估计的信道,具有很强相关特性,尤其在5 km的通信距离上,信道结构几乎完全一致。3种通信距离上的信道在通信时间长度内满足时不变的前提,因此可以采用双向DFE结构对接收数据进行处理。
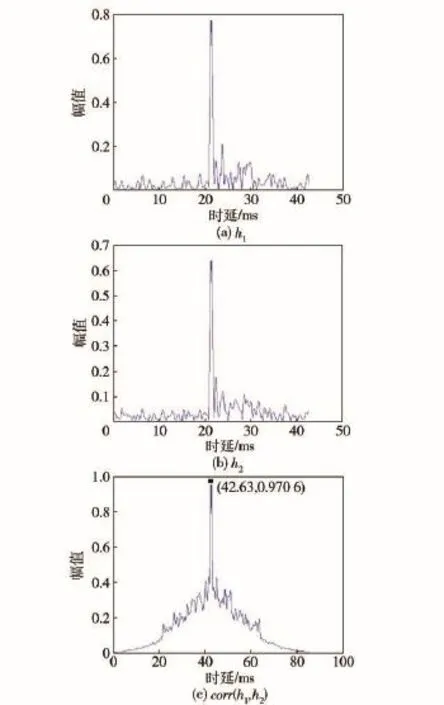
图5 通信距离7 km信道冲激响应Fig.5 Channel impulse responses at 7 km
2.3解码性能分析
本文采用正向判决反馈均衡和双向判决反馈均衡两种方式对5 km、7 km和10 km的接收数据进行处理,其中均衡器抽头间隔为T/2(T为码元宽度),即每个码元采集两个点。均衡器的前馈滤波器抽头个数为50,反馈滤波器抽头个数为30.尽管海试水声信道结构较为简单,但由于通信过程中海浪较大,海面的随机起伏会使接收信号产生相位跳变,因此本文在均衡器中内嵌二阶锁相环用于跟踪相位的变化,锁相环的传输函数为

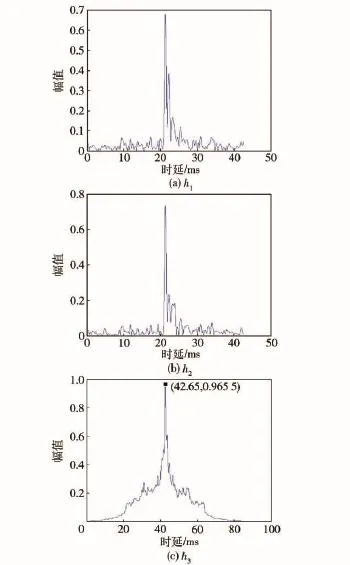
图6 通信距离10 km信道冲激响应Fig.6 Channel impulse responses at 10 km
本文采用递归最小二乘(RLS)算法进行均衡器系数的更新,其中遗忘因子λ=0.996 5,矩阵初始化因子σ=0.5.图7、图8和图9分别给出了通信距离5 km、7 km和10 km的接收数据解码星座图。以均衡后输出信噪比和误码率为比较标准,表1给出了相应的统计结果,其中输出信噪比计算公式为
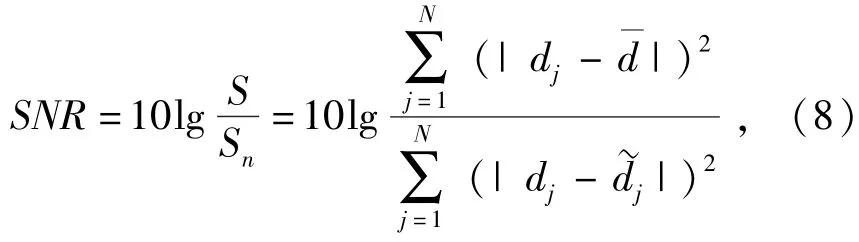

图7 通信距离5 km数据解码星座图Fig.7 Decoding constellation at 5 km

图8 通信距离7 km数据解码星座图Fig.8 Decoding constellation at 7 km
对比图7、图8和图9解码星座图以及表1海试试验数据解码统计结果可看出:与传统的正向DFE相比,采用双向DFE对5 km、7 km和10 km的接收数据进行处理时分别取得了2.74 dB、2.36 dB和1.54 dB的增益。随着通信距离的增加,采用双向判决反馈均衡的解码增益逐渐降低,一个可能的原因是通信距离增加时信道结构变得复杂,表现为声信号在传输过程中能量不再集中于某一单独的途径,而是分散到几条途径中(如图6),使得采用双向判决反馈均衡也不能大幅度提高解码性能。

图9 通信距离10 km数据解码星座图Fig.9 Decoding constellation at 10 km
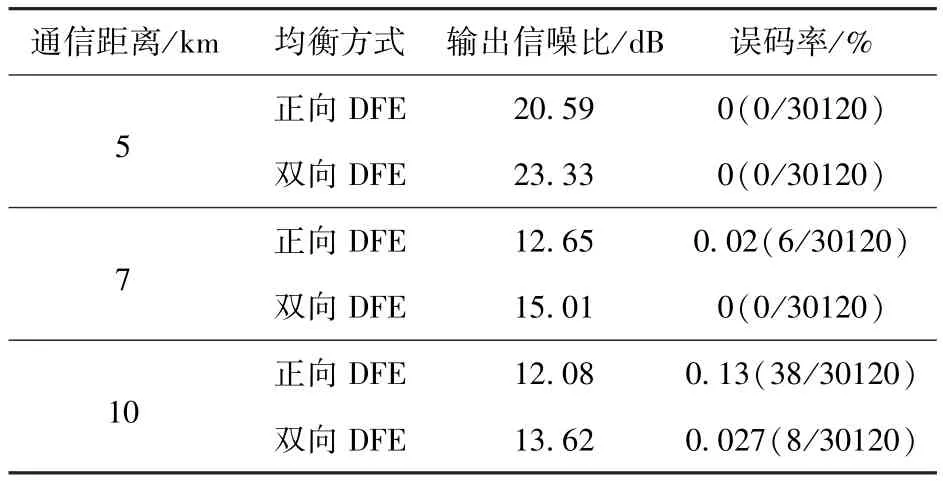
表1 海试试验数据解码统计结果Tab.1 Statistical decoding results of sea experimental data
3 结论
本文通过海试试验研究了基于PTRM的双向DFE结构,PTRM能够聚焦信号能量,压缩信道多途结构;双向DFE利用正向均衡和反向均衡错误传播的差异显著改善解码性能。海试试验信道探测结果表明:在水声通信过程中海洋环境较为稳定,水声信道结构没有发生明显改变。与传统的DFE相比,采用双向DFE处理5 km、7 km和10 km的试验数据时分别取得了2.74 dB、2.36 dB和1.54 dB的增益。本文下一步工作将把基于PTRM的双向DFE结构应用于信道时变条件下的水声通信中。
(References)
[1] Sazontov A G,Malekhanov A I.Matched field signal processing in underwater sound channels[J].Acoustical Physics,2015,61(2):213-230.
[2] 惠俊英,生雪莉.水下声信道[M].第2版.北京:国防工业出版社,2007. HUI Jun-ying,SHENG Xue-li.Underwater acoustic channel[M]. 2nd ed.Beijing:National Defense Industry Press,2007.(in Chinese)
[3] Stojanovic M,Catipovic J A,Proakis J G.Phase-coherent digital communications for underwater acoustic channels[J].IEEE Journal of Oceanic Engineering,1994,19(1):100-111.
[4] Song H C,Hodgkiss W S,Kuperman W A.High-rate synthetic aperture communications in shallow water[J].Journal of the A-coustical Society of America,2009,126(6):3057-3061.
[5] Edelmann G F,Song H C,Kim S,et al.Underwater acoustic communications using time reversal[J].IEEE Journal of Oceanic Engineering,2005,30(4):852-864.
[6] Yang T C.Temporal resolutions of time-reversal and passive-phase conjugation for underwater acoustic communications[J].IEEE Journal of Oceanic Engineering,2003,28(2):229-245.
[7] Rouseff D,Jackson D R,Fox W L J,et al.Underwater acoustic communication by passive-phase conjugation:theory and experimental results[J].IEEE Journal of Oceanic Engineering,2001,61(4):821-831.
[8] Song H C,Hodgkiss W S,Kuperman W A,et al.Improvement of time reversal communications using adaptive channel equalizers [J].IEEE Journal of Oceanic Engineering,2006,31(2):487-496.
[9] Song H C,Kim J S,Hodgkiss W S,et al.High-rate multiuser communications in shallow water[J].Journal of the Acoustical Society of America,2010,128(5):2920-2925.
[10] Flynn J A,Ritcey J A,Rouseff D,et al.Multichannel equalization by decision-directed passive phase conjugation:experimental results[J].IEEE Journal of Oceanic Engineering,2004,29(3):824-836.
[11] Stojanovic M,Capitovic J A,Proakis J G.Adaptive multi-channel combining and equalization for underwater acoustic communications[J].Journal of the Acoustical Society of America,1993,94(3)1621-1631.
[12] Song A,Badiey M,Song H C,et al.Impact of ocean variability on coherent underwater acoustic communications during KauaiEx [J].Journal of the Acoustical Society of America,2008,123(2):856-865.
[13] Tang X G,Ding Z.A simple iterative bi-directional equalization for EDGE wireless systems[C]∥IEEE Global Telecommunications Conference.Taipei:IEEE,2002.
[14] Jeong S,Moon J.Turbo equalization based on bi-directional DFE [C]∥IEEE International Conference on Communications.Cape Town,South Africa:IEEE,2010.
[15] Balakrishnan J.Time-reversal decision feedback equalizer and MIMO channel training[D].Ithaca,NY,US:Cornell University,2002.
Experimental Demonstration of Underwater Acoustic Communication Based on Bidirectional Decision Feedback Equalizer
HAN Xiao1,2,SHENG Xue-li1,2,YIN Jing-wei1,2,LIU Bing1,2
(1.Acoustic Science and Technology Laboratory,Harbin Engineering University,Harbin 150001,Heilongjiang,China;2.College of Underwater Acoustic Engineering,Harbin Engineering University,Harbin 150001,Heilongjiang,China)
A robust single carrier underwater acoustic communication system is designed by combining bidirectional decision feedback equalizer(DFE)with passive time reversal mirror(PTRM).At the receiver,PTRM is used to suppress the multipath spread and focus the signal energy.And then the bidirectional DFE is used to combine the outputs from the traditional DFE and the backward DFE,decreasing the errors brought by a wrong decision and improving the robustness of traditional DFE.The data processing results from a shallow water experiment in underwater acoustic channel stable environment show that the bidirectional DFE could get some processing gain,and the output signal-to-noise ratios are increased by 2.74 dB,2.36 dB,and 1.54 dB at 5 km,7 km,and 10 km,respectively.The decoding performance is effectively improved compared with the traditional DFE.
communication;underwater acoustic communication;passive time reversal mirror;bidirectional decision feedback equalizer;robustness
TB567
A
1000-1093(2016)03-0553-06
10.3969/j.issn.1000-1093.2016.03.023
2015-05-18
国家自然科学基金面上项目(51179034、61471137);船舶预先研究支撑技术基金项目(13J3.1.5)
韩笑(1988—),男,博士研究生。E-mail:hanxiao1322@hrbeu.edu.cn;生雪莉(1978—),女,副教授。E-mail:shengxueli@aliyun.com
猜你喜欢
军工文化(2019年12期)2019-03-31 09:24:58
环球时报(2017-11-09)2017-11-09 11:27:45
船舶经济贸易(2017年8期)2017-08-30 14:36:14
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
电子器件(2015年5期)2015-12-29 08:42:39
电源技术(2015年1期)2015-08-22 11:16:14
声学技术(2014年1期)2014-06-21 06:56:22
长春师范大学学报(2013年10期)2013-10-23 08:44:42
