
变波门大斜视滑动聚束SAR成像关键技术分析
2016-10-13 06:39聂鑫*
电子与信息学报 2016年12期
聂 鑫*
变波门大斜视滑动聚束SAR成像关键技术分析
聂 鑫*
(南京电子技术研究所 南京 210039)
大斜视高分辨率SAR成像中,改变开启波门的操作可以在保证距离测绘带宽度的情况下减小录取回波的数据率,滑动聚束的扫描模式可以在保证高分辨率的情况下扩大方位场景范围。但是变波门后只能获得交错的距离徙动曲线,而滑动聚束的扫描方式容易引起方位模糊。该文研究了变波门大斜视滑动聚束模式下SAR成像的关键技术,提出分子孔径升采样的解模糊算法以及基于空域波束分割的二级极坐标格式算法(PFA),将对波门变化的补偿融入运动补偿处理的过程中,通过先波束分割后子图像拼接的方法突破了PFA平面波前的近似对成像场景尺寸的限制,显著扩大了传统PFA的有效成像场景范围,使其适用于大斜视滑动聚束模式下的大场景成像。实测数据处理表明了算法对大场景变波门数据的有效性。
大斜视高分辨率SAR;滑动聚束;变波门;波束分割;二级极坐标格式算法
1 引言
机载SAR斜视成像己经成为机载火控雷达的重要工作模式之一,在正侧视已经做到了0.1 m级别的基础上,我国机载大斜视SAR成像处理也在向0.1 m级高分辨以及大幅宽方向不断发展。一般可以采用滑动聚束的扫描模式来获得大的方位幅宽,而滑动聚束模式下如果PRF选取不够容易引起方位模糊。
而随着分辨率的提高和斜视角的增大,在全合成孔径内,单个目标的距离徙动可以跨越数万个距离单元。在AD接收时若采取变录取波门技术,可以有效减小回波信号的数据率。但是不免要增加后期信号处理的工作量。
而极坐标格式算法(PFA)在大斜视变波门滑动聚束模式情况下有其独特的优越性:(1)PFA适用于任意斜视角;(2)PFA算法可将对波门变化的补偿融入原有的运动补偿中;(3)PFA对PRF的要求最低。而传统PFA采用了平面波前的近似,有效聚焦半径较小。本文基于数字聚束的思路提出了基于空域波束分割的二级PFA算法,不仅可以有效地扩展PFA有效场景,且通过在运动补偿时调整参考函数实现对波门变化的补偿,可保证对变波门数据的处理效率。由于该方法不基于对残留误差的公式推导,它并不依赖于误差的推导阶数,理论上可扩展至处理任意大的场景。
2 大斜视变波门回波信号模型
图1(a)为传统斜视情况下的SAR几何模型,假设载机飞行速度,雷达以固定的脉冲重复频率PRF向地面成像区域发射脉冲,成像区中心记为点。到间的飞行距离为合成孔径长度,孔径中心位置为。成像区中心到孔径中心的距离为,地面成像区域的坐标系如图所示定义,沿航向,垂直于航向。处雷达视线方向地面投影同轴的夹角为(即斜视角),由坐标系旋转角度得到坐标系,为孔径中心处视线地面投影方向,垂直于。令代表慢时间,代表合成孔径时间内任一时刻处(记为点)视线地面投影同轴的夹角,而点视线地面投影同间的夹角定义为。雷达与地面波束中心指向点之间的斜距记为,与任意点目标的瞬时距离记为。随时间的变化规律如图1(b)所示。
发射线性调频信号(LFM)后得到解调后地面场景范围内的2维回波信号为
由于该SAR系统工作在前斜视模式,由图1(b)可见,点目标存在过大的距离徙动,而在回波数据录取过程中采取改变开启波门的操作可以补偿天线波束旋转所带来的影响,在实现相同测绘带宽度的情况下有效减小回波信号的数据率。为了降低系统难度,一般间隔多个脉冲周期进行一次调整。波门的改变量一般按照的变化规律设计,大斜视时一般根据其中的线性项。若每个波门代表的距离为,设时刻的起始录取波门相比初始脉冲提前了个,即在中人为引入一定的距离徙动,变波门后的信号为
3 关键技术问题
3.1 波门变化的补偿方案
开启波门的变化尽管使得目标信号在距离域产生额外的徙动,但该徙动是确定的,可以在信号处理时给予补偿,常规算法需要先恢复为正常徙动曲线,而这样就需要大量补零,将原本AD采样节省的数据量进一步扩展。而PFA原本首先要以场景中心为参考对回波数据进行运动补偿,那么变波门情况下,可利用记录的波门变化量重新构造运动补偿函数为
相位补偿后得到新的相位历史,即PFA处理前的信号
(5)

这一步平面波前的假设就是传统PFA有效成像场景受限的原因,设PFA的有效成像场景半径为0,0和载频、分辨率要求、雷达作用距离有关:
(7)
3.2 滑动聚束SAR解模糊方法
由于PFA隐含着方位去斜操作,而方位去斜后的信号带宽由场景的方位宽度决定,因此PFA对PRF的要求是最低的,但选取也需要比瞬时的多普勒带宽略大。但在滑动聚束模式下,辐射场景比聚束时的一个波束宽度的照射区域大,若PRF选取时仅满足比瞬时的多普勒带宽略大的准则,那么孔径越长,对应滑过的场景就越大,全孔径处理时方位去斜后仍然会出现多普勒模糊的现象,必须考虑如何解模糊。
本文考虑用分子孔径升采样的方法进行解模糊:(1)将回波数据分成若干个子孔径分别进行去斜处理,短孔径内波束照射场景移动不大,可认为与聚束情况相当,可保证方位PRF不模糊。(2)在方位不模糊的情况下便可对去斜的子孔径数据通过在变换域补零的方法进行升采样处理,(3)对分别升采样的子孔径信号进行拼接,恢复全孔径信号,以便做后期的统一PFA全孔径处理。具体算法流程如图2所示。
3.3 基于空域波束分割的二级PFA扩展有效场景
通过数字聚束的思想可以对雷达回波信号进行重新运动补偿,可以控制天线波束指向在雷达实际波束照射范围内变化到任意方向,本文基于数字聚束的思路提出了基于空域波束分割的二级PFA算法,主要包括几个基本步骤:(1)首先用第1级PFA对全场景进行粗聚焦成像,通过两维空域滤波和降采样将全场景图像分解成若干个子场景图像。(2)再通过PFA逆操作将子图像数据恢复到原始信号域,相当于获得了若干个子场景的回波数据,如图3所示。(3)利用数字聚束的思路人为转移波束场景中心至子场景中心,之后再用PFA二次成像。由于每个子场景都处于二次PFA成像的中心,只要将这部分子场景范围控制在PFA的有效成像场景半径以内,即可保证子图成像无散焦。将各子图像拼接即可得到全场景的无散焦大图。对子图像内部也可以方便地进行精确的空不变运动误差补偿。
用第1级PFA实现波束分割的两维空域预滤波处理成为了关键,PFA对全场景进行粗聚焦成像后即可对全图进行划分,截取图像中的子区域。子图划分的准则是保证划分后的子场景范围控制在PFA的有效成像场景半径以内,见式(7)。子图划分后,只需记录下子图中心的方位、距离坐标,便可通过逆极坐标转换(包括方位逆重采样,距离逆重采样)恢复到原始数据域获得窄波束数据,子波束划分处理流程如图4所示。
通过上面的子波束划分处理,原始的宽波束数据分解成了若干窄波束数据。此时便可利用数字聚束的方法对该子数据进行重新运动补偿,以该子场景中心点为参考点所设计补偿的参考函数为

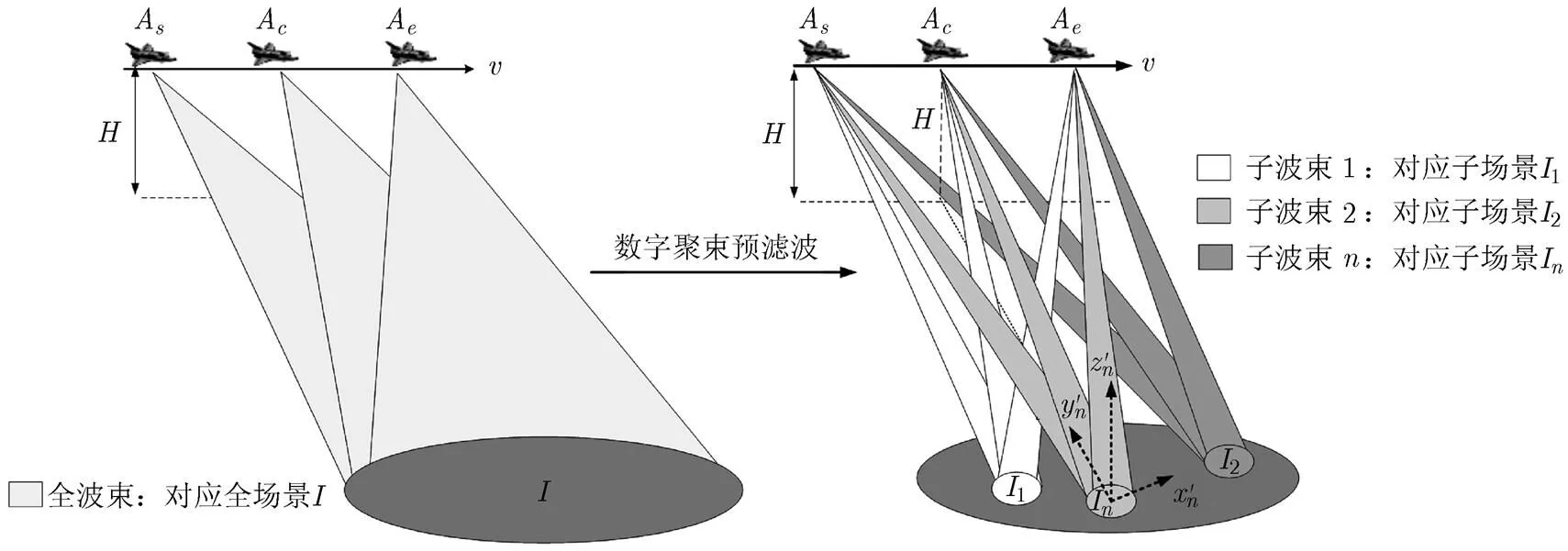
图3 数字聚束转移场景中心并进行波束分割示意图
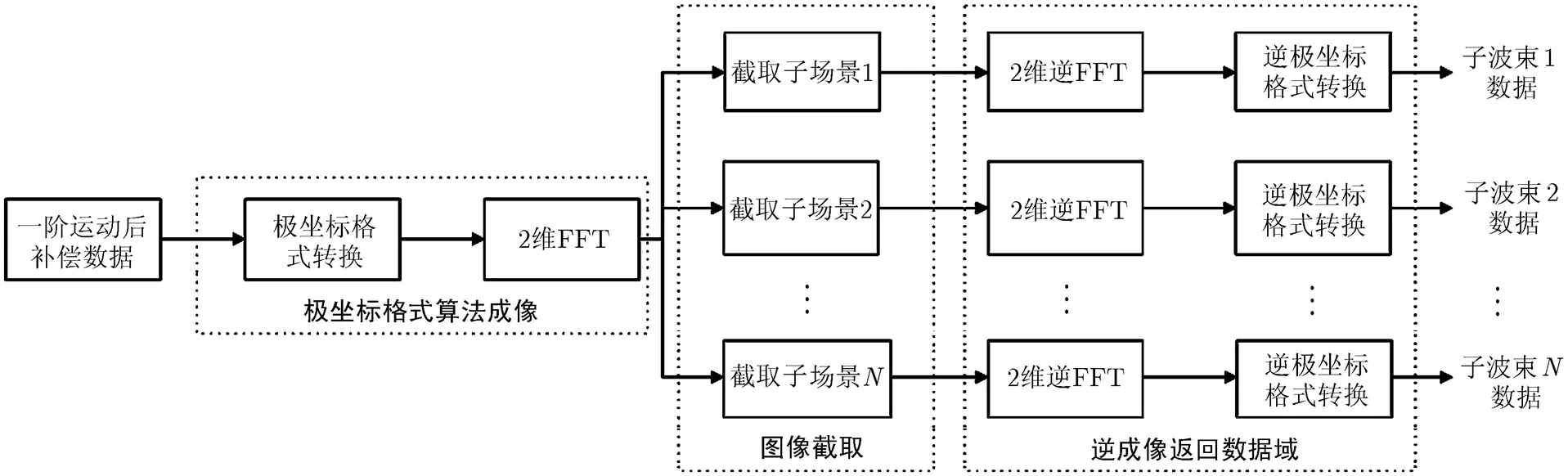
图4 子波束划分处理流程

通过上述第2次运动补偿,每个子场景中心点的回波相位已被补偿为零,即表明已精确补偿了该点的空变运动误差。虽然这种补偿在子波束内是空不变的,但只要子波束,也就是子场景划分得足够小,保证在PFA的有效成像场景半径内,那么非中心点目标的残留误差完全是可以忽略的。以对第个子波束为例,首先以子波束照射场景中心为原点重新建立新的高斯坐标系,表示孔径中心处视线地面投影方向,垂直于。在该坐标系内,点目标的坐标为,雷达天线相位中心的瞬时方位和俯仰角分别为和。由于此时平面波前的假设在小场景情况下成立,差分距离仍然可做一阶泰勒近似如式(10),而不会引入误差而带来散焦:
(10)
这样整个算法的具体操作流程如图5所示。下面定量分析一下本算法总的运算量:PFA算法中,运动补偿等点乘的运算量非常小可以忽略,运算量最大的就是距离向和方位向的插值操作过程。若原始数据量为(方位距离),那么一级PFA中需进行点的插值,这也是传统PFA的计算量。二级PFA中和之前都各需进行一对距离、方位插值,等同于需要进行点的插值,相当于本算法增加了2次传统PFA的计算量。而为了获得分辨质量的提升,一定的计算量增加是难免的。
实现过程中需要注意的有两点:首先,为了充分利用信号支撑区,极坐标插值时一般采用沿视线方向插值(LOSPI)方法,获得的子图像与原始图像坐标系之间不仅有平移,还有旋转,后期的几何失真校正需考虑这两点。其次,2维空域预滤波的同时可以实现数据的降采样,子图像在全图像中由于有中心偏移,其对应的子波束信号在波数域应该是个带通信号。而截取的子图像通过2维IFFT变换到波数域后仅能获得一个低通信号。因此,在逆重采样后一定要根据子图中心像素坐标构造对应的距离、方位相位因子,将低通信号恢复为带通信号之后再进行重新运动补偿。
4 仿真数据验证
按照表1所示的SAR系统参数进行了仿真。由于平面波前假设对PFA有效场景的限制,在表1参数条件下PFA的理论成像场景半径仅为90 m。以黑色圆点代表仿真点目标,给出1515个仿真点目标的分布示意图如图6所示。其中相邻点目标方位、距离间距都为80 m,对应成像区范围为1120 m1120 m,已远超出PFA的有效成像场景大小。
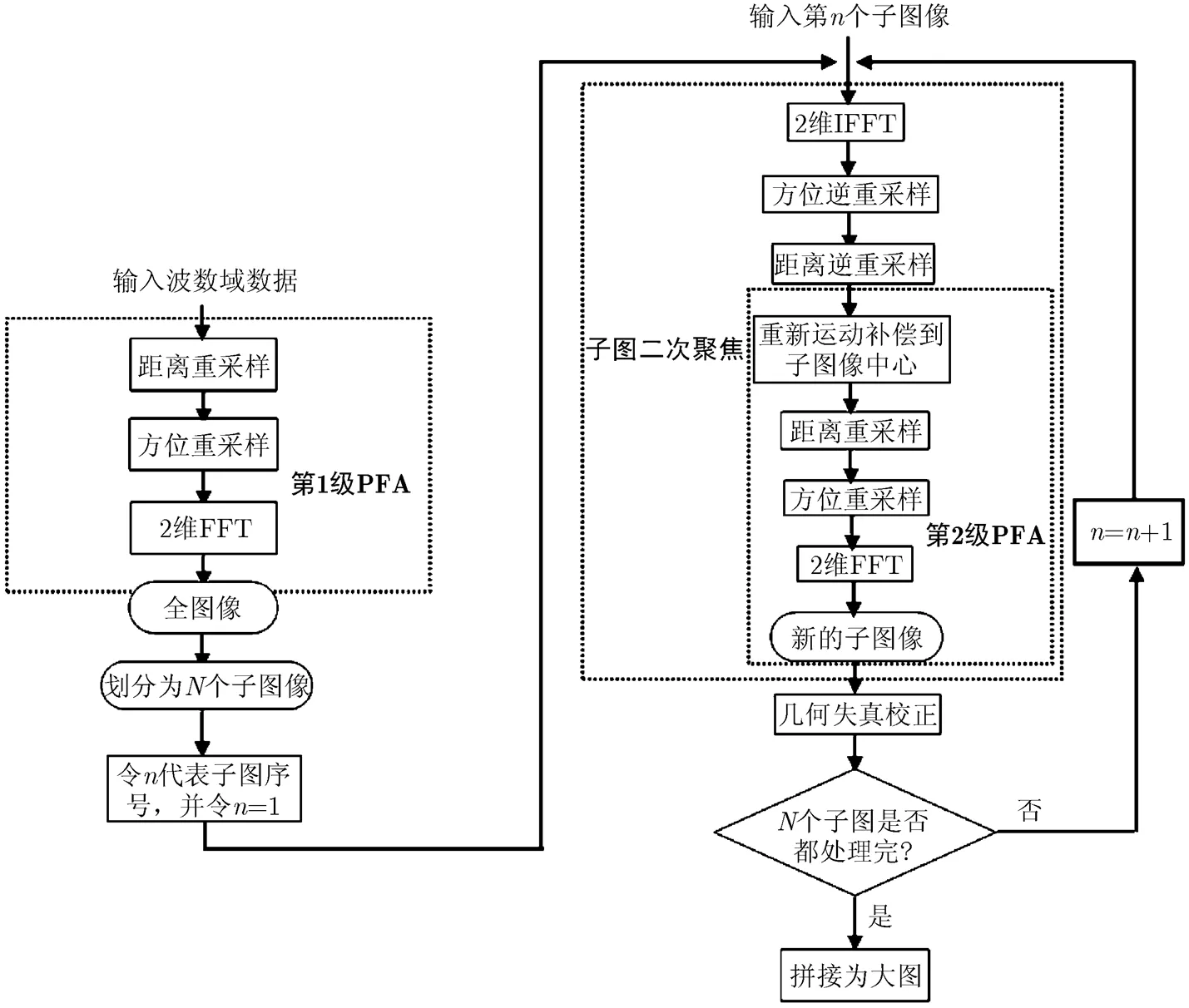
图5 基于空域波束分割的二级PFA算法
表1 仿真主要参数

载频10 GHz 孔径积累时间6.83 s 带宽1.5 GHz 载机高度3000 m 前向速度200 m/s 孔径中心与场景中心距离10000 m 斜视角20° 分辨率(距离×方位)0.1 m×0.10986328 m
场景中心点用传统PFA即可聚焦良好,不再赘述。而超出PFA有效聚焦半径的场景才需要进行二次聚焦。为分析补偿精度,下面选择场景边缘处点进行点目标分析。图7给出用传统PFA算法和用本文算法获得的点的2维点目标响应等高线图(方位和距离像素间隔分别细化为0.0105 m0.0088 m),从图中可以看到,PFA直接获得的图像存在严重的散焦,而利用本文二级PFA算法处理后聚焦性能得到明显改善,达到理论要求。
5 实测数据验证
利用实测数据多次验证了本文研究的二级PFA方法在大斜视高分辨率情况下的处理能力,在改变开启波门的情况下尤其能体现其高效稳定性。
针对某机载X波段聚束SAR变波门实测数据, 其理论分辨率要求优于0.13 m0.13 m,斜视角约为,其预设的起始波门变化方案如图8,波门根据距离徙动曲线按线性变化,变化周期为62个脉冲。实际录取数据的距离徙动曲线,波门变化情况如图8,可见采到数据全部是有效数据,节省了大量的采样数据冗余。
若采用其他算法需先将数据恢复到正常录取波门,分辨率0.13 m要求的脉冲个数达到40000个以上,距离变化量可达到,可达到8000个波门以上,数据量将扩展为2倍以上,而每个脉冲的大部分采样点都是无效数据。利用本文设计的处理流程,对波门变化引入的徙动在距离匹配滤波时通过调整参考函数实现补偿,不会额外增加运算量。
在该参数条件下,传统PFA有效成像场景半径约为150 m,而图片对应的成像区域在方位、距离向宽度分别为3200 m和1100 m,已远远超出PFA的有效成像场景半径限制,如图9(a)所示,在全图像范围内存在着空变的散焦。因而需要对全图像划分,并再对子图进行二次聚焦以提高成像质量。
雷达回波信号经过距离向匹配滤波、对场景中心运动补偿后得到240008192点的2维矩阵。根据PFA有效成像场景半径与全场景大小之间的关系,处理时选择将全图像分为1611=176个子图像,每个子图像包含20481024个像素,相邻子图间方位向重叠512个像素,距离向重叠256个像素。图9(b)给出利用二级PFA处理后,逐子图自聚焦并利用相邻子图相关法拼接后所获得的全图像,可见所有区域聚焦良好,且没有拼接痕迹。图9(c)为图9(b)中房屋局部放大图。
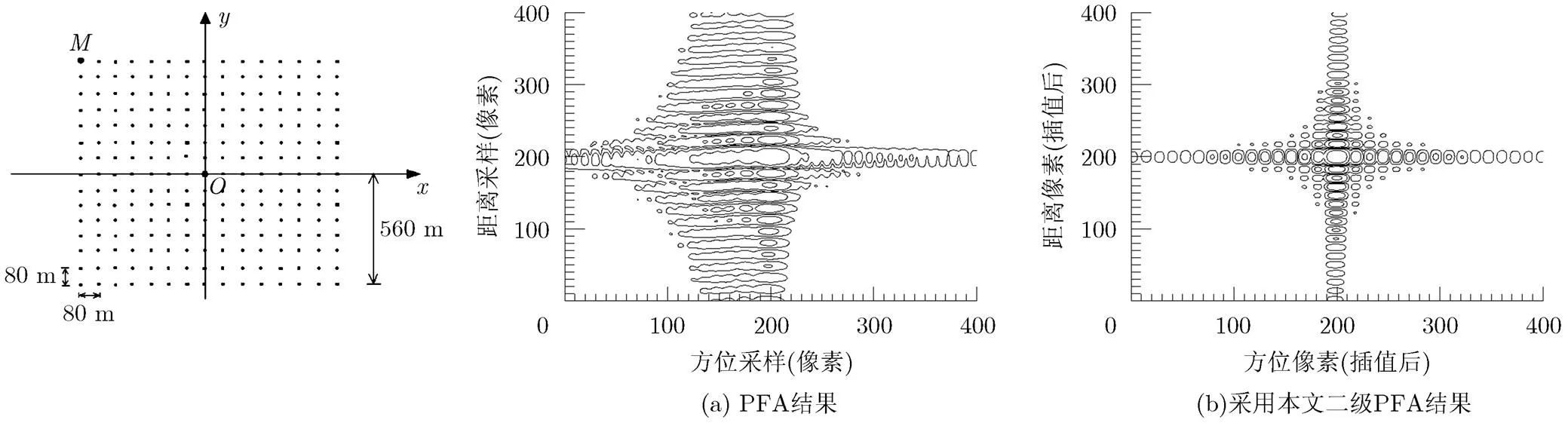
图6 仿真点目标分布 图7 点目标M的2维响应特性
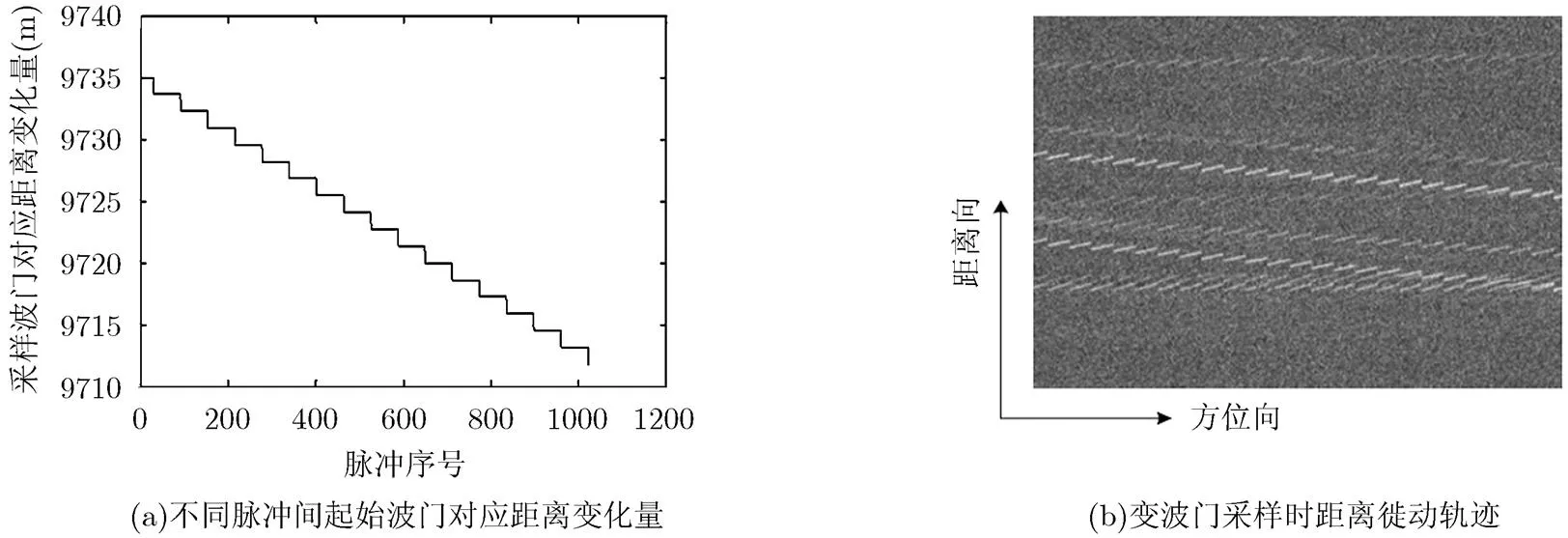
图8 波门变化情况示意图
6 结束语
本文提出了一种空域波束分割的二级PFA算法,适用于处理滑动聚束模式下的大斜视大场景高分辨SAR成像,尤其适用于变波门情况下的运动补偿。该方法通过在运动补偿时调整参考函数实现了对开启波门变化的补偿,可保证对变波门数据的处理效率而不增加额外的运算量。首先用第1级PFA对全场景进行粗聚焦成像,通过2维空域滤波和降采样将全场景图像分解成若干个子场景图像。再通过PFA逆操作将子图像数据恢复到原始信号域,对每个子图像对应的小块数据便可以利用数字聚束的思路人为转移波束场景中心至子场景中心。由于每个子图像都被精确补偿到了子图中心,之后再用PFA二次成像便不会出现散焦,最终通过子图拼接便可获得聚焦良好的大图。该方法可大大扩展传统PFA对成像场景的限制。
随着成像分辨率的提高,雷达平台非线性运动将不可避免,残留误差在大场景中的空变性使得其具体公式很难推导并精确补偿。由于本文算法不依赖于残留误差的推导阶数,理论上可扩展至处理任意大的场景,在对大场景进行超高分辨率成像时将具有很大的应用前景。
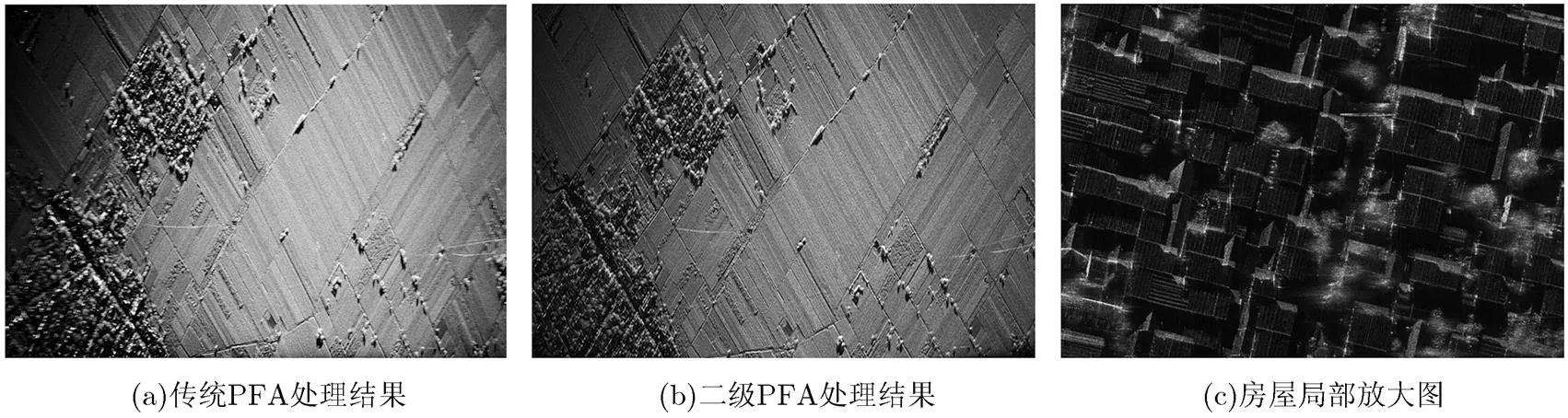
图9 成像结果
参考文献
[1] TSUNODA S I and PACE F. Lynx: A high-resolution synthetic aperture radar[J]., 1999, 3704: 1-8. doi: 10.1117/12.354602.
[2] SLOAN G R and DUBBERT D F. Affordable miniaturized SAR for tactical UAV applications[J]., 2004, 5408: 74-83. doi: 10.1117/12.541564.
[3] LECOZ D, DUPAS J, DUPLESSIS O,. Development status of the ONERA airborne SAR facilities (RAMSES)[C]. The European Conference on Synthetic Aperture Radar, Astrium Friedrichshafen, 1998.
[4] FERNANDEZ P DThe ONENRA RAMSES SAR system[C]. IEEE International Geoscience and Remote Sensing Symposium, Toronto, Canada, 2002, 3: 1723-1725.
[5] CANTALLOUBE H and COLIN E. The ONERA RAMSES SAR: Latest significant results and future developments[C]. IEEE Radar Conference, New York, USA, 2006: 518-524. doi: 10.1109/RADAR.2006.1631849.
[6] CANTALLOUBE H and FERNANDEZ P D. Airborne X-band SAR imaging withresolution: Technical challenge and preliminary results[J].,, 2006, 153(2): 163-176. doi: 10.1049/ ip-rsn:20045097.
[7] ENDER J H G and BERENS P. Multi channel SAR/MTI system development at FGAN: From AER to PAMIR[C]. The International Geoscience and Remote Sensing Symposium, Toronto, Canada, 2002: 1679-1701. doi: 10.1109/IGARSS. 2002.1026225.
[8] BRENNER A R and ENDER J H G. First experimental results achieved with the new very wideband SAR system PAMIR[C]. The European Conference on Synthetic Aperture Radar, Cologne, Germany, 2002: 4-6.
[9] 聂鑫, 雷万明, 沈石坚. 高分辨率星载滑动聚束SAR成像方法研究[J]. 电子技术与软件工程, 2016(4): 71-73.
NIE Xin, LEI Wanming, and SHEN Shijian. The investigation of high-resolution sliding-spotlight SAR imaging algorithms[J].&, 2016(4): 71-73.
[10] MINH P N. Range cell migration correction for phase error compensation of highly squinted SAR[C]. The European Conference on Synthetic Aperture Radar, 2014, Berlin, Germany, 2014: 81-84.
[11] YANG Jun, SUN Guangcai, and XING Mengdao. A subaperture imaging algorithm to highly squinted TOPS SAR[C]. The European Conference on Synthetic Aperture Radar, 2014, Berlin, Germany, 2014: 398-401.
[12] WU Yufeng, XING Mengdao, SUN Guangcai,. An azimuth resampling based imaging algorithm for highly squinted sliding spotlight and TOPS SAR[C]. The European Conference on Synthetic Aperture Radar, 2014, Berlin, Germany, 2014: 406-409.
[13] SUN Zhichao, WU Junjie, LI Zhongyu,. Highly squint SAR data focusing based on keystone transform and azimuth extended nonlinear chirp scaling[J]., 2014, 12(1): 145-149. doi: 10.1109/ LGRS.2014.2329554.
[14] SOUMEKH M. Synthetic Aperture Radar Signal Processing with Matlab Algorithm[M]. New York: Wiley, 1999: Chapter 1.
[15] SOUMEKH M, Nobles D A, Wicks M C,Signal processing of wide bandwidth and wide beamwidth P-3 SAR data[J]., 2001, 37(4): 1122-1141. doi: 10.1109/7.976954.
[16] 聂鑫. SAR超高分辨率成像算法研究[D]. [博士论文], 南京航空航天大学, 2010.
NIE Xin. Study on ultra-high resolution SAR imaging algorithms[D]. [Ph.D. dissertation], Nanjing University of Aeronautics and Astronautics, 2010.
聂 鑫: 女,1983年生,高级工程师,主要研究方向为合成孔径雷达信号处理.
Research on Key Technique of Highly Squinted Sliding Spotlight SAR Imaging with Varied Receiving Range Bin
NIE Xin
(,210039,)
In highly squinted and high resolution SAR, the data receiving range bin can be continually adjusted to minimize the sampled data in echo collection, but the staggered range cell migration needs extra processing to be eliminated. To enlarge the imaging scene size with a relatively high resolution, sliding spotlight working mode could be used, yet this mode may cause azimuth ambiguity. In this paper, the key technique of highly squinted sliding spotlight SAR imaging with varied receiving range bin is investigated, a sub-aperture based upsampling ambiguity-resolving method is utilized and a new beam segmentation based 2-step PFA method is proposed, which incorporates the stagger compensation to the procedure of motion compensation. The method performs beam segmentation via digital spotlighting preprocessing firstly to generate multiple full-resolution phase histories of smaller image patches, which allow the approximation of planar wavefront in traditional PFA. PFA is used to produce focused fine resolution image for each small patch.Finally, all focused image patches are seamed together to get a full image. This divide-and-conquer approach breaks the image size limit in traditional PFA, and extensively enlarges the valid focused scene suitable for sliding spotlight mode. This new algorithm is validated to be effective and efficient via real data experiments.
Highly squinted and high resolution SAR; Sliding spotlight; Varied receiving range bin; Beam segmentation; 2-step PFA
TN957.52
A
1009-5896(2016)12-3122-07
10.11999/JEIT160812
2016-07-28;改回日期:2016-11-09;
2016-12-13
聂鑫 13913863864@139.com
猜你喜欢
幼儿园(2021年12期)2021-11-06
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
中国卫生标准管理(2015年8期)2016-01-15
小学生时代·大嘴英语(2015年7期)2015-11-23
中国当代医药(2015年29期)2015-03-01
舰船科学技术(2015年8期)2015-02-27
