基于直方图分析的航空摄像机自动调光方法研究
2016-10-13 19:02:27申小禾刘晶红楚广生
电子与信息学报 2016年3期
申小禾 刘晶红 楚广生
基于直方图分析的航空摄像机自动调光方法研究
申小禾①②刘晶红*①楚广生①
①(中国科学院长春光学精密机械与物理研究所 长春 130033)②(中国科学院大学 北京 100049)
航空摄像机在空中对地面进行拍摄,拍摄场景复杂,传统的灰度平均值法在一些如有干扰点或背景与目标灰度差别大的场景下曝光会不正确,丢失图像信息,为了解决这些问题,该文在根据图像灰度信息的调光算法以及硬件实现方面进行了相关研究。首先根据当前帧图像的灰度直方图中灰度级为0和255附近的信息进行初调;然后根据图像直方图及其卷积和,搜索其中的峰值区域并确定图像的不感兴趣区域(包含的灰度级单一,信息量少的区域);接着根据这些区域占整幅图像的比重,由权值分配曲线为其分配不同的权值;最后计算加权后的灰度平均值,并将其作为反馈量控制下一帧的调光。实验结果表明,在普通场景下能够准确曝光,在暗背景和亮背景场景下,相比传统方法使图像感兴趣区域信息熵提高10%以上。此方法能适用于多种场景,满足航空摄像机对复杂场景自动调光的需求。
图像处理;航空摄像机;灰度直方图;加权平均值;自动调光
1 引言
现代航空成像探测系统在侦察过程中,从空中对地面进行拍摄,拍摄的场景复杂,存在很多的干扰因素,使得在成像探测过程中会出现曝光不足或曝光过度的情况发生。曝光不足或曝光过度都严重影响成像的质量,使拍摄的图像丢失信息,失去图像的完整性[1]。
随着电子技术的发展,基于数字图像的自动调光方法成为目前自动调光的重要方法。自动调光就是摄像机自动对所拍摄的场景进行曝光,获得理想的图像。摄像机通过自动调节来控制曝光的参数有:光圈大小、曝光时间以及信号增益[2,3]。光圈大小和曝光时间用于调节接收到的光能量,信号增益用于对电信号进行放大。自动调光技术就是通过捕获图像特性参数与参考值进行比较和分析,建立图像特性参数与调光参数之间的映射关系,将映射的调整值反馈至调光控制系统。工程中主要应用的调光方法为灰度平均值法,即将图像灰度平均值作为反馈量,通过调节光阑大小和曝光时间长短,使得图像平均值在合理的范围内。这种方法适用于场景亮度均匀,没有干扰的情况,但在实际拍摄的过程中,经常出现背景与目标的亮度差异较大的情况,这种方法不能对其很好地调光。为了使调光方法能适应更多的场景,国内外学者对其进行了很多研究。例如,文献[4]将图像平均分为若干小块,对图像行与列搜索出连续亮度区域,得到场景中的主体与背景,根据两者对比度对目标亮度进行补偿,但对于图像中主体与背景边界不明显的情况不能做出判断;文献[5]比较分区后各区域与全局图像熵的大小,划分感兴趣区域与不感兴趣区域,并由此分配权重,提高了自动曝光的准确性,图像熵的计算复杂度高,不利于硬件实现;文献[6]细分图像场景,对通过普通调光方法效果不好的场景,提出了相应的调光方法,针对性强;文献[7],文献[8]提出将图像分为6个区域,制定模糊规则,为每个区域分配不同的权值计算加权灰度平均值,这种方法因为分区固定,不能随场景的变化而变化,有一定的局限性。
本文针对航空图像的特点,提出了首先统计图像灰度信息,初步调光,使得得到的图像没有溢出现象,然后根据单位门序列与直方图做卷积和运算,得到的峰值对应不感兴趣区域,再根据不感兴趣区域所占比重分配不同权值,将加权后的灰度平均值作为反馈量控制调光,使图像达到最佳曝光状态。这种方法能在不同的场景下,划分出不同的不感兴趣区域,分配不同的权值,适应性强。
2 调光方法
2.1 曝光原理介绍
图像亮度与当前曝光量之间的关系:
其中,为当前图像亮度,为常量,表明此时场景的照明条件,为周围环境的亮度,为相机增益,为曝光时间,/#为镜头的光圈数。摄像机在工作时,对场景进行连续拍摄,前后两帧图像相隔时间短,和的变化可以忽略不计,图像亮度只与当前光圈数和曝光时间有关。
2.2 图像形成模型
2.3 初调
图像的灰度直方图反映图像中各个灰度级分布的情况,图1中(a), (b), (c)为对同一场景进行拍摄的3幅图像,从左向右分别为曝光不足,曝光适度和曝光过度的图像,图1中(d), (e), (f)分别为(a), (b), (c)的灰度直方图,横坐标表示灰度值,纵坐标表示

图1 同一场景不同曝光量图片及直方图对比
图像中每个灰度值的像素个数。
从图1中可以看出,曝光过度的照片,灰度值在0附近处的像素数量很少,而灰度值在255附近的像素数量很多,尤其在灰度值为255时,此时的图像在灰度级高的区域有明显的溢出现象,此区域内的信息有丢失,曝光不足的照片灰度值主要集中于灰度值较低的区域,不能全面地反映出场景中的信息,曝光适度的图像灰度直方图的分布均匀。
对同一场景进行拍摄,不同的曝光条件会使图像的灰度级分布差异很大,如果直接根据此时的图像进行处理,在曝光条件不良的情况下,图像不能完全反应拍摄场景中的信息,会出现判别失误。根据图像信息控制调光是在图像曝光基本正常的条件下进行的,即灰度值在0和255附近没有溢出的条件下。所以首先根据图像灰度直方图判别图像是否有溢出现象。
检测灰度值在0和255附近的像素数量和,其中
在直方图没有溢出的情况下,和以及和应满足式(5),式(6)条件之一:
条件式(5)表示灰度直方图两侧有像素分布,但分布的像素数量很少,小于常量。条件式(6)表示灰度直方图两侧没有像素分布。如不满足以上两种条件,当=0且很大时,表明在灰度值低时有溢出,需增加快门的曝光时间;当=0且很大时,表明在灰度值高时有溢出,需减小快门的曝光时间。
对不同场景不同曝光情况的上百幅图像直方图统计分析得到,曝光不足的图像直方图在0附近的灰度值较大,而曝光过度的图像在灰度值为255处的数值非常大,有溢出的现象。为了使直方图在两侧都没有溢出的现象,需要满足式(7)条件,在灰度值0附近的像素数小于定值且灰度值为255的像素数小于定值,即
2.4 直方图分析
如图2所示,图2(b)为图2(a)归一化灰度直方图,横坐标为灰度级,纵坐标()为每个灰度级的像素数占整幅图像像素总数的比重。直方图峰值区域为在图像直方图中一定宽度范围内,其像素数量远大于其他等宽范围内的像素数量的区域,如图2(b)中的,和附近区域。信息熵是不确定性的一种度量,信息熵大表示包含的信息量大,冗余信息少,反之亦然,其公式如式(8)所示,
其中,()表示图像信息熵,表示图像的灰度集合,表示图像的灰度级(=255),表示灰度值为出现的频率。图2(b)中区域相比于和区域陡峭且狭窄,包含的灰度级少但数量多,由式(8)可知,区域的熵值较小,冗余信息多。
人类视觉系统的特性是关注高复杂度区域,尽可能多地从图像中获取信息。感兴趣区域为包含灰度级丰富的高复杂区域,即直方图中的平坦区域灰

图2 示例图像及其直方图和卷积和图
度值对应的图像区域,其对信息熵的贡献大;不感兴趣区域为包含灰度级单一的低复杂区域,即直方图中的陡峭区域灰度值对应的图像区域,其对信息熵的贡献小。为了使调光更合理,本文通过直方图信息搜索出不感兴趣区域灰度值,即直方图中陡峭峰值区域的灰度值范围,然后将其对应到图像的具体区域,减少不感兴趣区域对调光的影响。
单位门序列与归一化后的直方图进行卷积和操作[9],可以找出直方图中陡峭的峰值区域,计算方法如式(9)所示,
其中,表示灰度值,()表示灰度值为的像素个数占全部像素的比重,P为门序列的宽度。P需要预先设定,大量实验表明,在图像灰度级为256时,P设为10可以使后期处理能得到满意的效果,图2(c)即P为10时得到的图2(b)的卷积和图,横坐标为灰度级,纵坐标为卷积和P。卷积和P中的每个凸极点对应直方图中的一个峰值区域,从得到的峰值区域中选取陡峭的峰值区域,判断为不感兴趣区域,若无,则场景中无不感兴趣区域。
搜索不感兴趣区域灰度值流程如下:
(1)得到图像归一化直方图;
(2)搜索归一化直方图中是否存在大于0.01的峰值,若不存在,则图像中无不感兴趣区域,流程结束;若存在,进行步骤(3);
(3)得到直方图的卷积和图,搜索卷积和图中是否存在大于0.1的峰值,若不存在,则图像中无不感兴趣区域;若存在,进行步骤(4);
(4)统计卷积和图峰值数量,若>2,进行步骤(5);若,标记较大的峰值点,进行步骤(6);
(6)将标记的卷积和峰值点与步骤(2)中得到的直方图峰值点比较,若灰度值相差大于P,则判定图像无不感兴趣区域,流程结束;若灰度值相差小于或等于P,则标记此峰值点,进行步骤(7);
(7)检测步骤(6)中得到的峰值宽度,若>20,则图像中无不感兴趣区域,流程结束;若,则此峰值区域对应不感兴趣区域灰度范围,流程结束。
2.5 不感兴趣区域
得到了不感性兴趣区域灰度范围后,下一步就是将其对应到图像中的具体区域。如果只从像素级进行判别,影响图像特征完整性。对原图像进行尺度变换,对原图像的第级近似金字塔图像像素依次进行判别。不宜选得过高或过低,过高,图像中一些特征信息体现就不明显;过低,又会降低特征的完整性。经过层层近似的图像刚好小于20×20时,能满足以上条件。本文所对应在工程中应用的摄像机分辨率为1024×768,考虑以上原因,同时考虑硬件实现时存储方便,变换后的图像总像素数小于256(即),选取为6,判断不感兴趣区域,能得到满意的效果,即将原图像变换为16×12,如图3所示。
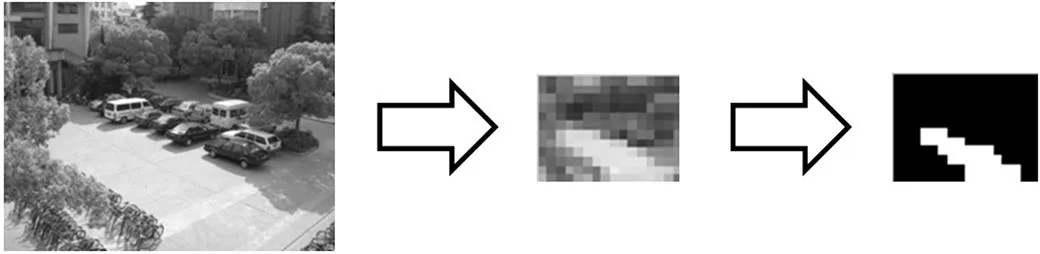
图3 不感兴趣区域搜索举例
标记出来的近似金字塔像素点对应原图像中的区域即为不感兴趣区域,不同场景下,不感兴趣区域的大小会有所不同。当不感兴趣区域在图像中占的比重较小时,不感兴趣区域的灰度值与整体平均值相差很多,其多为干扰点,此时应为其分配较小(接近0)的权值;随着不感兴趣区域的增大,当不感兴趣的区域在图像中占的比重较大(接近于1)时,其多为包含低频信息的背景,与图像的形成模型式(2)中的入射分量有很大关联,大范围的不感兴趣区域光的反射量占整个场景的比重很大,影响整幅图像的形成,如还为其分配较小的权值,将会导致不正常曝光。所以随着不感兴趣区域占的比重的增大,为其分配的权值也应增大。使用一个Sigmoid函数作为分配权值的函数,表达式为
权值分配曲线如图4所示,横坐标为不感兴趣区域占整幅图像的比重,纵坐标为分配的权值大小。
加权灰度值可由式(11)得到:

图4 权值分配曲线
(11)
其中,p为第个像素的权值,r为第个像素值,192为近似金字塔图像总像素数(即16×12)。将得到的加权灰度值作为反馈量,控制曝光系统,实现自动调光。
3 算法硬件实现
自动调光算法通过对当前帧图像亮度信息的分析来控制下一帧的曝光条件,实时性要求高。FPGA(现场可编程门阵列)具有可重复编程,实时性好和体积小的特点,满足航空摄像机对体积与实时性的要求,所以选取FPGA作为硬件平台。
算法在FPGA中的实现需要由以下几个功能模块组成:(1)RGB转换为亮度;(2)乒乓操作模块;(3)直方图统计及卷积和统计;(4)判断直方图溢出;(5)计算近似图像;(6)寻找峰值区域;(7)不感兴趣区域搜索并分配权值,计算加权后平均值。FPGA的整体功能框图如图5所示。在ISE自带的仿真工具ISIM环境下仿真。
下面对主要功能模块进行介绍:
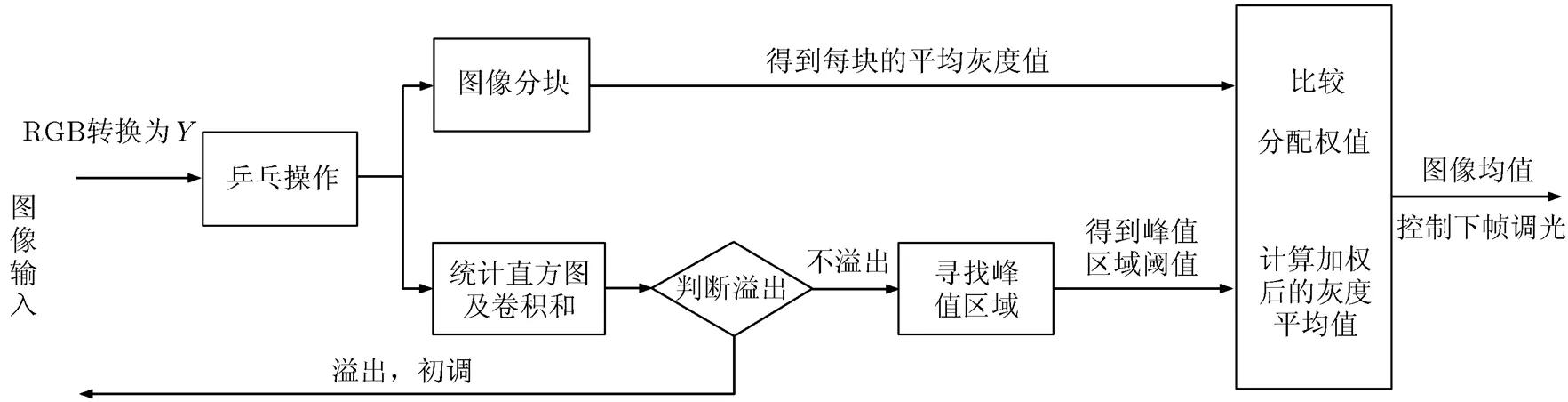
图5自动调光算法硬件实现框架图
(1)RGB转换为亮度:根据转换公式=0.299×R+0.578×G+0.114×B, FPGA不能处理小数,所以将式中右侧小数全部扩大1024倍,再将得到的向右移10位即得灰度值。
(2)乒乓操作及分块模块:要对图像进行分块,对于数据流形式的图像,需要先将数据存入RAM中,从RAM中再选择数据。如将整幅图像存入一个RAM,会造成空间的浪费,因为要将图像分为64×64的小块,采用乒乓缓存操作的方法,使用两个单口RAM,每个RAM的容量为64×1024,通过控制每块RAM的输入输出,使得数据流连续输出。乒乓操作示意图如图6所示。
对在乒乓操作中存入RAM的数据按分块后的数据流读出,例如在第1行读入64个数据后,读出的地址转到第2行,即从RAM中的第1024个数据开始读入,在读入的过程中累加数据,读入64行数据后,第1块读入结束,同时得出这一块的平均值,依此类推,可以得到各块的平均值,将每块的平均值存入一块新RAM中,用于与阈值比较。

图6 乒乓操作示意图
(3)直方图和卷积及统计模块:采用256个逻辑单元,每单元为20位的RAM对直方图和卷积并进行统计,在读取像素数据后,直方图RAM的地址与读入像素灰度值相同,对时钟进行4分频处理,在第1个时钟内读取直方图RAM的数据,即之前统计该灰度值的数量,在第2个时钟内进行加1处理,第3个时钟输入加1后的数值,第4个时钟输出数据。
在对一帧图像全部统计完后,控制直方图RAM按地址从小到大输出直方图,输出过程中得到卷积和,并检索直方图数据的极值点和卷积和的极大值点及其所处的灰度值,并使用RAM分别存储这些极大值点和它们的灰度值。直方图与卷积模块示意图如图7所示。在FPGA实现的过程中,直方图统计和卷积化是整个流程的最重要的环节。
(4)寻找峰值模块:将得到的符合一定条件的极
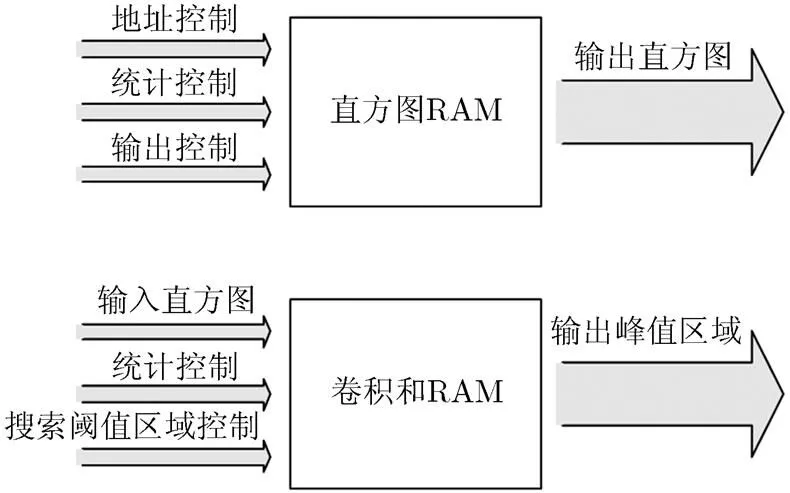
图7 直方图及卷积和统计示意图
大值点的RAM按序输出,根据2.4节中搜索不感兴趣区域的步骤,检测是否存在不感兴趣区域,若有,存储峰值范围的两端灰度值,作为阈值;若无,直接输出整幅图像灰度平均值。
(5)权值分配模块:获取第6级图像金子塔,将存储其像素值的RAM按地址由小到大输出,将平均值在阈值范围内的数值标记为1,不在阈值范围内的标记为0,并将标记为1和0的平均值分别累加,统计1的个数,即为不感兴趣区域的块数。使用FPGA每次计算权值分配函数耗时长,使用查找表能解决这一问题。FPGA不能进行浮点运算,将查找表中的权值都预先扩大1024倍,再将计算后的加权平均值左移10位,即得最终反馈值。
仿真实验中图像像素时钟为50 MHz,处理1024×768的图像一帧,需要15.76 ms,满足实时性要求。
4 实验结果
在实验中采用加拿大生产的PT1000-CL采集盒采集图像,采集的图像为RGB彩色图像,图像宽度为1024像素,高度为768像素,采用Xilinx公司的Spartan系列的XC3S50A芯片对图像数据进行处理得到加权后灰度平均值,由控制电路板IC-3CCD控制调光,图8为本文提出的自动调光系统结构框图。

图8 自动调光系统结构框图
镜头对场景进行成像,CCD将得到的光信号转换为电信号输入到硬件电路中,在FPGA中对图像的数据进行处理,得到反馈量对光圈大小和CCD积分时间进行控制,实现自动调光。经由图像采集盒将得到的图像输出到显示设备上显示得到的图像。
在实验室环境下进行拍摄,将本文提出的方法与传统灰度平均值方法进行对比,图9、图10和图11为不同场景下的效果对比图。图(a)为传统方法得到的图像,图(b)为图(a)中方框内的局部放大图,图(c)为使用本文方法得到的图像,图(d)为图(c)中方框内的局部放大图。图9为亮背景情况下效果对比图,图10为普通场景下效果对比图,图11为暗背景情况下效果对比图。它们的平均灰度值,加权灰度值及感兴趣区域灰度值见表1。

图9 亮背景效果对比图

图10 普通场景效果对比图

图11 暗背景效果对比图
表1 数据对比表
图
灰度平
均值
加权平
均值
感兴趣区域
平均值
感兴趣区域
信息熵
9(a)
178.7324
149.1761
140.8024
5.3602
9(c)
208.5421
195.7409
155.9762
6.2085
10(a)
96.5113
-
-
7.3540
10(c)
145.4567
-
-
7.7591
11(a)
121.3436
157.0169
175.4727
6.0677
11(c)
98.5241
120.7252
171.0507
6.8438
传统方法将整幅图像灰度平均值作为反馈量,控制调光,在亮背景下,整体图像灰度值适中时,得到的图像中感兴趣区域曝光不足,表现出此区域亮度偏低,图像信息不完整,同时不适合人眼观看;反之亦然。本文使用加权的灰度值作为反馈值,其中感兴趣区域被赋予较大的权值,能够改善传统方法存在的问题。在普通场景下能够正确曝光,在此场景下灰度直方图中不存在陡峭的峰值区域,不存在感兴趣区域与不感兴趣区域之分,表1中10(a)与10(c)无对应数据。
表1为图9、图10和图11的对比数据,从中可以看出,在亮背景下,感兴趣区域的信息熵提高了15.8%,普通场景信息熵提高了5.5%,暗背景下感兴趣区域的信息熵提高了12.8%。
5 结论
本文通过对图像直方图信息的分析,提出了一种针对复杂场景,尤其是背景与目标亮度差别较大场景的自动调光方法。本文方法首先根据图像直方图信息先进行初调,使得图像灰度直方图两侧没有溢出,保证曝光基本正常,然后划分图像的感兴趣区域和不感兴趣区域,将调光的重点放在感兴趣区域上,减小了干扰点和无关背景区域对整体灰度平均值的影响,从而改变曝光量,使得曝光更合理,提高了图像质量,尤其是图像感兴趣区域的图像质量。实验数据显示此方法对背景与目标灰度差别大的场景得到的图像感兴趣区域灰度适中,感兴趣区域的信息熵提高了10%以上。随着场景的变化,得到的感兴趣区域也随之变化,场景适应性强,满足航空摄像机对复杂场景自动调光的需求。
[1] 陶会锋, 杨华, 王一程, 等. 可调强光对可见光 CCD 摄像系统成像过程的干扰研究[J]. 红外与激光工程, 2014, 43(5): 1605-1609.
TAO Huifeng, YANG Hua, WANG Yicheng,Study on interference to imaging process of visible CCD camera by adjustable light[J]., 2014, 43(5): 1605-1609.
[2] 黄辉. 可见光相机调光调焦图像处理算法研究[D]. [硕士论文], 中国科学院光电技术研究所, 2014.
HUANG Hui. Research of automatic exposure and autofocus image processing algorithm for visible light camera[D]. [Master dissertation], Insititue of Optics and Electrics, Chinese Academy of Sciences, 2014.
[3] 郭惠楠. 彩色数字相机成像系统的关键性技术研究[D]. [博士论文], 中国科学院西安光学精密机械研究所, 2014.
GUO Huinan. Research on key technology of digital camera imaging system[D]. [Ph.D dissertation], Xi’an Institute of Optics & Precision Mechanics, Chinese Academy of Sciences, 2014.
[4] LIANG Jiayi, QIN Yajie, and HONG Zhiliang. An auto- exposure algorithm for detecting high contrast lighting conditions[C]. 7th International Conference on ASIC, Gulin, China, 2007: 275-278. doi: 10.1109/ICASIC. 2007. 4415733.
[5] 杨作廷, 阮萍, 翟波. 基于图像熵的高动态范围场景的自动曝光算法[J]. 光子学报, 2013, 42(6): 742-746. doi:10.3788/ gzxb20134206.0742.
YANG Zuoting, RUAN Ping, and ZHAI Bo. Auto-exposure algorithm for scenes with high dynamic range based on image entropy[J]., 2013, 42(6): 742-746. doi: 10.3788/gzxb20134206.0742.
[6] 王成艳, 刘晶红, 楚广生, 等. 图像场景区分与航空摄像机自动调光方法研究[J]. 液晶与显示, 2013, 28(6): 948-954. doi:10. 3788/YJYXS2013 2806.0948.
WANG Chengyan, LIU Jinghong, CHU Guangsheng,Scene distinguish and aerial camera auto-dimming[J]., 2013, 28(6): 948-954. doi:10.3788/YJYXS2013 2806.0948.
[7] 周杰. 基于多区域分割及模糊逻辑的自动曝光方法[D]. [硕士论文], 上海交通大学, 2007.
ZHOU Jie. Auto-exposure method bases on image segmentations and fuzzy logic[D]. [Master dissertation], Shanghai Jiao Tong University, 2007.
[8] WANG Zefeng, YANG Lei, HUANG Jijiang,. The investigation of automatic exposure under extreme light[C]. The International Conference on Photonics and Optical Engineering (icPOE 2014), Xi’an, 2014, 94491W-1-94491W-5. doi: 10.1117/12.2074827.
[9] 杨海涛, 常义林, 王静, 等. 一种基于亮度直方图的自动曝光控制方法[J]. 光学学报, 2007, 27(5): 841-846.
YANG Haitao, CHANG Yilin, WANG Jing,. A new automatic exposure algorithm for video cameras using luminance histogram[J]., 2007, 27(5): 841-846.
[10] 刘志国, 刘晶红. 机载可见光摄像机调光方法研究[J]. 液晶与显示, 2011, 26(2): 249-254. doi: 10.3788/YJYXS20112602. 0250.
LIU Zhiguo and LIU Jinghong. Automatic exposure algorithm for airborne visible light camera[J]., 2011, 26(2): 249-254. doi: 10.3788/ YJYXS20112602.0250.
[11] BÜRKER M, RÖBINGC, and LENSCH H P A. Exposure control for HDR video[J].,,, 2014, 9138(5): 1-12. doi: 10.1117/12.2051127.
[12] TORRES J and MENÉNDEZ J M. Optimal camera exposure for video surveillance systems by predictive control of shutter speed, aperture and gain[J].-, 2015, 9400(S): 1-14. doi: 10.1117/12. 2083182.
[13] 郭惠楠, 曹剑中, 周祚峰, 等. 彩色数字相机快速自动曝光方法[J]. 光学学报, 2013, 33(10): 1011003-1-1011003-7. doi: 10.3788/AOS 201333.1011003.
GUO Huinan, CAO Jianzhong, ZHOU Zuofeng,. Fast automatic exposure approach for color digital camera[J]., 2013, 33(10): 1011003-1-1011003-7. doi: 10.3788/AOS201333.1011003.
[14] 焦继超, 赵保军, 唐林波, 等. 基于光照和帧间预测的空间图像曝光控制算法[J]. 光学学报, 2010, 30(2): 382-387. doi: 10.3788/AOS2010 3002.0382.
JIAO Jichao, ZHAO Baojun, TANG Linbo,Exposure algorithm for space image based on light and inter prediction[J]., 2010, 30(2): 382-387. doi: 10.3788/AOS20103002.0382.
[15] 张雷, 丁亚林, 张洪文, 等. 基于单帘快门的数字相机调光系统[J]. 光学精密工程, 2013, 21(5): 1265-1271. doi: 10.3788/ OPE.20132105. 1265.
ZHANG Lei, DING Yalin, ZHANG Hongwen,Adjustable exposure system for digital camera based on single curtain type shutter[J]., 2013, 21(5): 1265-1271. doi: 10.3788/OPE. 20132105.1265.
[16] 黄辉, 周进. 基于现场可编程门阵列的CCD相机自动调光[J].光学精密工程, 2014, 22(2): 426-433. doi: 10.3788/OPE. 20142202.0426.
HUANG Hui and ZHOU Jin. Auto-exposure for CCD camera based on FPGA[J]., 2014, 22(2): 426-433. doi: 10.3788/OPE.20142202.0426.
[17] SHIM Inwook, LEE Joon-young, and KWEON Inso. Auto- adjusting camera exposure for outdoor robotics using gradient information[C]. 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, 2014, 1011-1017. doi: 10.1109/IROS.2014.6942682.
[18] GONZALEZ R C and WOODS R E. Digital Image Processing[M]. Second Edition, Beijing, Publishing House of Electronics Industry, 2007: Second Chapter.
申小禾: 女,1990年生,博士生,主要从事航空可见光摄像机自动调光方面的研究.
刘晶红: 女,1967年生,研究员,博士生导师,主要从事机载光电成像与测量方面的研究.
Foundation Items: The National 863 Program of China (2008AA121803), Funds of Key Laboratory of Airborne Optical Imaging and Measurement, Chinese Academy of Sciences (2012MS06)
Auto Exposure Algorithm for Aerial Camera Based on Histogram Statistics Method
SHEN Xiaohe①②LIU Jinghong①CHU Guangsheng①
①(Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China)②(University of Chinese Academy of Sciences, Beijing 100049, China)
The aerial camera takes photographs from sky. Conventional auto exposure algorithms can not be suitable for some special scenes such as the background is bright or dark and few strong interference points exist. Unsuitable exposure causes information losing in images. In order to solve this problem, an algorithm based on gray value is proposed. Firstly, it regulates the exposure preliminarily using the information of the histogram near 0 and 255. Then it obtains the regions of no interest in the image through the convolution of the histogram and weighted different proportion for the regions according to their area in the entire image. Finally, the weighted average is computed, which is regarded as the feedback controlling exposure. Experimental results indicate that image entropy of regions of interest increased more than 10% in dark or bright background. This method is suitable for many scenes, and meets the demands of the aerial camera.
Image processing; Aerial camera; Histogram; Weighted average; Auto exposure
TP391.41
A
1009-5896(2016)03-0541-08
10.11999/JEIT150530
2015-05-06;改回日期:2015-12-02;网络出版:2016-01-14
刘晶红 liu1577@126.com
国家863高科技研究发展计划(2008AA121803),中国科学院航空光学成像与测量重点实验室基金(2012MS06)
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
中国交通信息化(2020年5期)2021-01-14 01:49:02
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
测控技术(2018年5期)2018-12-09 09:04:36
中国交通信息化(2018年9期)2018-11-09 01:09:20
电子制作(2017年17期)2017-12-18 06:40:52
自动化学报(2017年7期)2017-04-18 13:41:02