基于交互多模型无味卡尔曼滤波的移动机器人故障诊断
2016-10-11 07:24万伟张凤云杨斌
湖南文理学院学报(自然科学版) 2016年2期
万伟,张凤云,杨斌
(1. 长沙市轨道交通运营有限公司,湖南 长沙,410000; 2. 郑州铁路局 新乡电务段,河南 郑州,453000)
基于交互多模型无味卡尔曼滤波的移动机器人故障诊断
万伟1,张凤云2,杨斌1
(1. 长沙市轨道交通运营有限公司,湖南 长沙,410000; 2. 郑州铁路局 新乡电务段,河南 郑州,453000)
为了快速、准确地诊断出移动机器人的故障,将交互多模型算法和无味卡尔曼滤波(IMM_UKF)结合起来,通过各个故障模型的概率大小来判断故障是否发生。仿真结果证明,IMM_UKF的估计准确度要高于IMM _EKF,能够准确判断故障。
故障诊断; 交互多模型; 无味卡尔曼滤波; 移动机器人
故障诊断技术的研究对提高移动机器人的可靠性和安全性十分重要。故障诊断方法[1]大致可分为基于信号处理的方法、基于知识的方法和基于解析模型[2]的方法 3种。基于解析模型的移动机器人故障诊断方法主要有:对于确定性系统,有线性与非线性观测器[3]、滑模观测器[4]、高增益非线性观测器等; 对于随机混合系统,有卡尔曼滤波、扩展卡尔曼滤波、无味卡尔曼滤波、粒子滤波[5]、交互多模型方法等[6]。Hashimoto[7]等首次将多模型自适应估计(MMAE)用于移动机器人传感器故障诊断[8]中,多模型自适应估计的方法将各种故障模式建模,对每个故障模型进行滤波,通过判断各个模型的模型概率进行故障决策。对于非线性系统的故障诊断问题[9],传统的交互多模型扩展卡尔曼滤波由于求局部线性化的方法会产生较大的估计误差,甚至使滤波发散。本文所用的无味卡尔曼滤波[10]相较于扩展卡尔曼滤波[11]有较高的准确性和收敛性。
1 移动机器人的故障模型
1.1移动机器人的动力学模型

1.2移动机器人故障模式以及故障建模

机器人有3个传感器分别为左、右轮编码器和陀螺仪,设系统的模式集为mk= {m1,m2,m3,m4,m5,m6,m7},当传感器发生故障时,输出为0,则7个模型的观测矩阵分别为:h1= [(2v + Lω)/2,(2v - Lω)/2,ω]T; h2= [0,(2v - Lω)/2,ω]T; h3= [(2v + Lω)/2,0,ω]T; h4= [(2v + Lω)/2,(2v - Lω)/2,0]T; h5= [0,0,ω]T;h6= [0,(2v - Lω)/2,0]T; h7= [(2v + Lω)/2,0,0]T。7个模式分别为:m1,无故障; m2,右编码器故障; m3,左编码器故障; m4,陀螺仪故障; m5,左右编码器同时故障; m6,右编码器和陀螺仪故障; m7,左编码器和陀螺仪故障。
2 基于IMM_UKF的故障诊断
2.1交互多模型算法
IMM 的基本思想是用一组模型集来描述模式不断变化的系统,每一个模型代表着系统在某一时刻的一个模式,各个模型之间的切换过程是一个马尔可夫过程,其切换的模型转移概率矩阵通过经验得到,从而得到每一个模型的状态估计值,加权求和之后得到最终的状态估计。IMM算法的原理如图1所示。
2.2无味卡尔曼滤波
UKF通过特定的确定性采样方法选取一组 sigma采样点,这些sigma点和状态分布有相同的均值和协方差,对每个 sigma点进行非线性变换,用来逼近系统的后验均值和协方差,再对这些非线性变换之后的sigma点进行卡尔曼滤波得到UKF。
2.3故障诊断递推算法

图1 IMM算法原理

3 仿真结果与分析
设定仿真内容为:(1)0~15 s小车以2 m/s的速度做直线运动,0~5 s无故障(m1); 5~10 s右编码器故障(m2); 10~15 s无故障(m1)。(2)15~30 s小车以2 m/s的线速度,1 s-1的角速度做左转弯运动,15~20 s无故障(m1); 20~25 s左编码器故障(m3); 25~30 s右编码器和陀螺仪故障(m5)。(3)30~50 s小车以2 m/s的线速度,1 s-1的角速度做左转弯运动,30~35 s无故障(m1); 35~40 s右编码器故障(m4); 40~50 s,左右编码器同时故障(m6)。

2.4故障判断准则

图2 速度真实值和估计值的比较

图3 角速度真实值和估计值的比较

图4 速度估计误差比较

图5 角速度估计误差比较

图6 IMM_UKF模型概率曲线
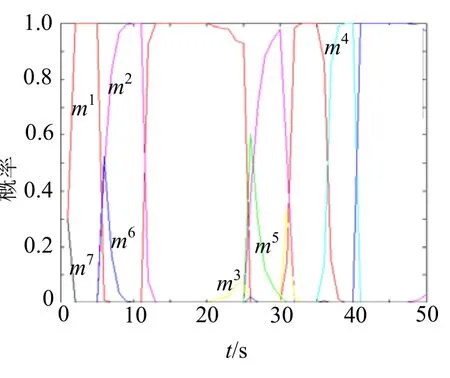
图7 IMM_EKF模型概率曲线
由图2至图7可知:从状态估计和估计误差上来看,IMM_UKF的估计准确度要高于IMM_EKF,显然IMM_UKF的估计误差低于IMM_EKF; 从模型概率曲线上看,比较真实情况,IMM_UKF能够准确判断故障,反观IMM_EKF在25~40 s模型概率最大值所对应的模型并不是正确的故障模型,亦即25~40 s故障判断错误。因此,IMM_UKF的状态估计准确度和故障判断准确率都要优于IMM_EKF方法。
4 结论
考虑到移动机器人的数学模型相对容易获得,本文所用到的IMM方法能够很好地判断出移动机器人传感器故障。并且,考虑到非线性系统,将IMM和UKF结合起来,有效地提高了相对于传统EKF的状态估计准确度和故障判断准确率。仿真结果表明,IMM_UKF方法对于移动机器人传感器故障诊断是有效的并且明显优于IMM_EKF方法。
[1] Frank P. Fault diagnosis in dynamic systems using analytical and knowledge based redundancya survey and some new results [J]. Automatica, 1990, 26(3): 459–474.
[2] 贾庆贤, 张迎春, 管宇, 等. 基于解析模型的非线性系统故障诊断方法综述[J]. 信息与控制, 2012, 41(3): 356–364.
[3] 王振华, 沈毅, 张筱磊. 基于增广观测器的非线性系统执行器故障诊断[J]. 宇航学报, 2012, 33(13): 1 742–1 746.
[4] 刘聪, 李颖晖, 朱喜华. 基于自适应滑模观测器的不匹配非线性系统执行器故障重构[J]. 控制理论与应用, 2014, 31(4): 431–437.
[5] Yu Linli, Cai Zixing, Zhou Zhi, et al. Fault detection and identification for dead reckoning system of mobile robot based on fuzzy logic particle filter [J]. Journal of Central South University, 2012, 19(5): 1 249–1 257.
[6] Liu Zhenxing, Zhang Liangli. Robust fault detection for multiple packets transmission networked systems with Markovian jump model [C]// 2012 24th Control and Decision Conference (CCDC), 2012: 2 484–2489.
[7] Hashimoto M, Kawashima H, Nakagami T, et al. Sensor fault detection and identification in dead-reckoning system of mobile robot interacting multiple model approach [C]// Proceedings of the IEEE/RS J International Conference on Intelligent Robots and Systems, USA: IEEE, 2001, 3(3): 1 321–1 326.
[8] 张三同, 郝晶晶. 多模型粒子滤波的故障诊断方法研究[J]. 控制工程, 2012, 19(5): 864–869.
[9] 王志强, 王志华, 张秀云, 等. 非线性状态估计法在风电齿轮箱故障预警中的应用[J]. 计算机测量与控制, 2014(8): 2 609–2 611.
[10] 徐德民, 刘富樯, 张立川, 等. 基于改进连续-离散无迹卡尔曼滤波的水下航行器故障诊断[J]. 西北工业大学学报, 2014, 28(5): 756–760.
[11] 李知周, 张锐, 朱振才, 等. 基于扩展卡尔曼滤波的动量轮故障检测方法[J]. 航空学报, 2010, 31(8): 1 614–1 621.
[12] 方正, 佟国峰, 徐心和. 基于贝叶斯滤波理论的自主机器人自定位方法研究[J]. 控制与决策, 2006, 21(8): 841–847, 862.
(责任编校: 刘刚毅)
Fault diagnosis of mobile robot based on interacting multiple model unscented Kalman filter
Wan Wei1,Zhang Fengyun2,Yang Bin1
(1. Changsha Metro Operation Co Ltd,Changsha 410000,China; 2. Xinxiang Electric Works Paragraph,Zhengzhou Railway Bureau,Zhengzhou 453000,China)
In order to diagnose the fault of the mobile robot quickly and accurately,the interacting multiple model algorithm and unscented Kalman filtering are combined to solve the issue of fault diagnosis of nonlinear systems,by assessing the occurrence of the fault by the probability of each faulted model. Compared with the extended Kalman filter,it is successfully improves the accuracy of calculation.
fault diagnosis; interacting multiple model; unscented Kalman filter; mobile robot
TP 315
1672-6146(2016)02-0038-04
10.3969/j.issn.1672-6146.2016.02.009
万伟,121554593@qq.com; 张凤云,531438789@qq.com。
2015-11-30
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年9期)2021-11-02
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
百科探秘·航空航天(2017年9期)2017-12-31
北京航空航天大学学报(2017年6期)2017-11-23
制造技术与机床(2017年3期)2017-06-23
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
铁道科学与工程学报(2015年5期)2015-12-24