
小型无人机深失速降落回收的试验研究
2016-10-10 09:21陈李萍殷虹娇
中国科技纵横 2016年14期
陈李萍 殷虹娇
(航天神舟飞行器有限公司,天津 300457)
小型无人机深失速降落回收的试验研究
陈李萍 殷虹娇
(航天神舟飞行器有限公司,天津 300457)
通过与传统的固定翼无人机回收方式进行相比,经过特殊减震设计的无人机可采用深失速降落方式进行着陆,能降低无人机对降落场地的要求,无需撞网回收需末端精确引导辅助降落设备,同时也降低了对飞控及传感器精度要求,是更加适合小型无人机在复杂环境使用的降落方式,具备一定的工程应用前景。
无人机 深失速 回收
1 引言
相对于起飞,无人机的回收是一个更为复杂、也更容易出现故障的阶段,能否安全着陆已经成为评价无人机性能的一项重要指标。目前来讲,无人机的回收主要分为撞网回收、轮式滑降、空中勾取回收等。
小型电动无人机以电力驱动,起飞重量3KG以内,控制半径在10KM左右,主要用于执行战场侦查、监视、目标搜索、打击毁伤效果评估等战术任务,较为典型的小型电动无人机有美国的“渡鸦”和以色列的“云雀”等。小型电动无人机大多机翼载荷较小,采用手抛起飞或弹射起飞,降落一般采用伞降回收或拦阻网回收。伞降回收是一种常用回收方式,无人机顶部或腹部有预留的伞舱,当进入开伞点时,飞机将按照预定程序或在遥控指令作用下开伞,伞开后无法再进行姿态控制,随风降落在指定区域。拦阻网回收是在降落区域设置拦阻网,让无人机沿下滑线落入拦阻网中。
传统的回收方式无人机在着陆前都具有较大的相对速度,需要使用降落伞和拦阻网来减少无人机X和Z方向的速度。但是伞降需要在无人机内部布置降落伞,增加了开伞机构,且开伞高度较高,着陆点受外界影响较大,定点着陆比较困难。拦阻网回收方式需要在地面回收区域搭建拦阻网,对飞控及传感器的精度要求较高。深失速回收方式则可以让无人机在近地位置快速进入深度失速状态,减少无人机X方向前行速度,不但无需跑道,回收简易,对下滑的轨迹亦无严格要求,而且不需要增加复杂回收设备,易于实现快速回收。
由于无人机采用深失速回收时触地速度较大,目前只适用于自重较轻,能承受较大机翼过载的小型无人机。在以美军RQ-11“渡鸦”电动无人机为对象进行仿真分析,确定了深失速着陆的关键参数。经飞行试验证明,合理选择小型电动无人机失速高度和方向舵角度,深失速回收方案是可行的。
通过与传统的固定翼无人机回收方式进行相比,经过特殊减震设计的小型无人机可采用深失速降落方式进行回收,能降低无人机对降落场地的要求,无需撞网回收需末端精确引导辅助降落设备,同时也降低了对飞控及传感器精度要求,是更加适合小型无人机在复杂环境使用的降落方式,具备一定的工程应用前景。
2 深失速回收阶段飞控逻辑设计
常见的无人机的轮式自主着陆过程一般分为降高段、平飞段和触地滑跑阶段。深失速回收过程为降高段、平飞段、失速着陆段。正常飞行结束后,无人机降低到一定飞行高度后保持高度平飞,靠导航系统引导或遥控控制到达着陆点后,关闭动力系统,迅速增大无人机俯仰角,让无人机进入深度失速状态,无人机前向速度将迅速减小到零,随后在重力作用下飞机姿态改平,进入失速下滑直到着陆。深失速回收过程如图1所示。
根据深失速着陆回收段剖面分析,确定无人机在执行完任务后,进入着陆回收阶段时,应经历四段飞行着陆逻辑。
首先,在无人机执行完任务后,机载飞控可按照预设航线航点自主进入返航段。在返航阶段应保持无人机高度不变,根据采集的GPS数据提前调整无人机航向对准到预着陆点航向,以便在着陆后三个阶段减少飞控调整PID数量。
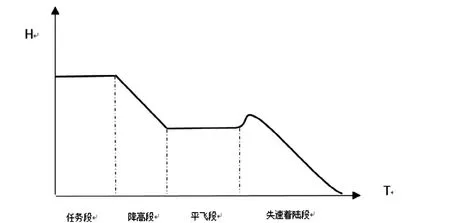
图1 深失速回收过程
机载飞控应具备按照起飞前设定的返航点进入着陆阶段的能力,这就需要无人机在飞行前应规划好返航点的属性特征值,飞控在判断航点数据特征值后将触发返航机制。在返航阶段无人机的飞控自主调整PID参数以及相应配平无人机各舵面,控制油门和无人机姿态,使无人机能根据采集的GPS数据按照预定的航迹和高度飞行。无人机在进入返航点时,飞控应先调纵向参数,使得飞机在过弯不掉高,保证飞行安全。纵向控制分为内回路姿态控制和外回路高度控制。姿态控制主要参数是俯仰角增益和俯仰角阻尼系数。外回路则是高度差的比例,积分,微分三个参数。转弯过程中还有一个就是滚转角到升降舵的一个补偿,这个是为了消除横侧向和纵向耦合。
返航阶段纵向遇到的最大问题就是过弯的时候高度保持不住。纵向的调试主要是几个参数的合理选取,油门在这个过程中进行配合。内回路调节主要看俯仰角跟踪给定俯仰角的快慢与超调。可以选择爬升或者下滑来调试内回路参数。当俯仰角与给定角度相差太大,可以考虑增大俯仰角增益系数,反之减少;俯仰角若果出现震荡,增大俯仰阻尼。高度PID参数调节可以看平飞段跟踪高度情况来调节;高度比例系数太大高度跟踪明显,但是容易导致沉浮运动。当升降速度太大的时候,应适当增加微分系数,提高高度通道阻尼。
而在返航阶段横侧向主要是飞机在转弯的过程难以按照预定轨迹飞行,应根据无人机的转弯半径,在横滚角限定的范围内,飞控自主优化PID参数,配合纵向控制保持无人机返航阶段航向对准预着陆点航向。在降高阶段,飞控应通过控制各舵面保持无人机的航向,解算降高段的前向距离,调整无人机的俯仰角按照设定的下滑速率实现降高。此时,油门应保持在失速油门曲线上方,维持降高段无人机的速度不会大幅提高。在平飞段,无人机在保持航向数据的同时,飞控逐渐小幅降低油门,调整无人机始终保持在失速油门曲线附近,同时维持无人机高度在相对高度5m左右。
进入到最后失速着陆阶段,飞控应判断前向距离及控制侧偏的正负值,理论上在到达预设着陆点时,应调整油门为零位,并给定大俯仰角使无人机进入失速阶段。
3 可使用深失速着陆方式的飞机特征
使用深失速着陆的飞机必须具备以下几个条件:
(1)机翼结构必须能承受失速拉起瞬间的过载,在工程样机材质上应采用高强度的复合材料,具备轻量化,结构强度硬等特点。(2)机腹将作为着陆第一受力点,需要进行减震设计,一般可设计为高强度泡沫包裹芳纶纤维材料作为减震垫,具备缓冲及卸载冲击过载对无人机的损伤。(3)机载设备的安装需要特殊减震设计。
满足以上三个要求的小型电动无人机才能进行深失速着陆方式的尝试。本文选用的是美军RQ-11“渡鸦”(RQ-11"Raven")电动无人机1:1模型,RQ-11是一种手持发射的轻型侦查用无人飞行器(UAV),由航空环境公司(AeroVironment Inc.)为美国军方研发,于2002年时开始实际军事部署,主要用于战场上的低空侦察、监视与目标识别等用途。基本参数为:机长0.9米,翼展1.4米,总重2kg,后置式电动机,可受力自分解机翼部件,全动平尾,全机使用芳纶纤维材料及高强度泡沫。
4 深失速着陆方式回收参数的选择
4.1 失速着陆方向舵角度的选择
在本回收方案中,拉平末端忽略横侧向的影响,仅考虑静风状态的基础模型。飞机的升力系数在小迎角范围内与迎角 ɑ呈线性关系。在超出失速迎角后,迎角会自动增大,前进速度急剧减小,下沉速度急剧增大,阻力系数随着迎角的增大也会迅速增大。深失速阶段的迎角主要受升降舵控制,升降舵偏角的大小,直接影响到无人机模型失速过程的快慢和无人机落地姿态。升降舵初始值过小,将无法进入深度失速状态,过大则使无人机尾部触地。由Matlab仿真结果可看出,升降舵初始偏角35°时无人机俯仰角最大值可达到45°,且无人机在俯仰角到45°时低头飘落响应最快,综合考虑确定升降舵初始偏角为35°,我们所使用的是RQ-11“渡鸦”电动无人机模型,所以只需要在深失速初期控制该机全动平尾拉起35°,就可以实现既能进入深失速,又能以最快速度从深失速状态改出进行平飘。
4.2 失速着陆高度的选择
高度的选择需要考虑两个方面:飞机从失速姿态改出为平飞所用时间T1和飞机改平后在重力和机翼升力作用下落地时间T2。由于实际应用时飞机应为逆风着陆,T1和T2均会有不同程度增加,所以在计算时不用再增加高度方向的裕度。在Matlab仿真数据的基础上多次试验调整得到模型最佳深失速启动高度5米。
5 试验过程与结论
控制无人机进入着陆平飞阶段,飞行高度5米,到达着陆点后,发出遥控停车指令,然后向无人机发出全动平尾拉起35°指令,此时无人机迎角快速增加,高度也随之增大,前向速度迅速减小为零,高度增加到一定值时飞机改平,靠重力着陆,触地后无人机可自分解部件全部散开。
从试验过程可以看出:无人机失速飘落的高度为5m,失速开始时高度会有所增加,因此深失速启动高度选择比较重要,过低拉平时间不够,容易出现异常姿态触地,造成机体受损。而启动高度过高导致飘落高度较大,无人机触地速度增加,如出现干扰容易造异常姿态触地,会造成无人机摔坏。本文所使用的模型在5米高度启动遥控深失速,成功完成了飞机改平动作,落地速度在机体强度承受范围内。如果使用导航模块自主进行深失速着陆,因为导航精度误差的原因,为防止飞机在深失速动作完成前着陆,造成机体损伤,着陆高度还应该适当提高。就小型无人机合理的失速高度考虑导航及传感器精度,应为10~15米左右。
6 结语
本文针对小型无人机,讨论了深失速回收方案应用于小型无人机的可行性。通过试验结果可以看出,深失速回收可以迅速减小无人机前向速度,实现了无人机得平稳飘落着陆。因此对于小型无人机来说深失速回收方案简单易行,具备一定的工程应用前景。
[1]王永寿.日本对无人机起飞着陆技术的研究[J].飞航导弹,2005 (3):45-49.
[2]徐永旺.无人机自动驾驶仪设计及控制方法研究[D].黑龙江:哈尔滨工业大学,2010.
[3]隋丹.飞机自动着陆系统设计与仿真[D].西安:西北工业大学,2003.
陈李萍(1982—),男,本科,现为航天神舟飞行器有限公司飞行试验部部长,飞行控制工程师,研究方向:无人机。
猜你喜欢
船海工程(2023年2期)2023-04-27
英语世界(2022年5期)2022-05-18
西安航空学院学报(2021年3期)2021-10-14
空间科学学报(2021年2期)2021-07-21
东西南北(2017年1期)2017-02-22
深空探测学报(2016年4期)2017-01-18
振动与冲击(2014年9期)2014-09-05
航天器工程(2014年4期)2014-03-11
