
海洋环境对UUV作战使用影响研究
2016-10-09 03:17何青海丁文强吴文龙海军潜艇学院山东青岛266199
舰船科学技术 2016年7期
何青海 ,丁文强 ,吴文龙( 海军潜艇学院,山东 青岛 266199)
海洋环境对UUV作战使用影响研究
何青海 ,丁文强 ,吴文龙
( 海军潜艇学院,山东 青岛 266199)
UUV的航行安全和所装载的武器、探测设备作战效能受海洋环境影响很大,是确定 UUV 航线和深度等具体方案时需重点考虑的因素。从海流、海况、内波、声场特征和密度跃层 5个方面论述它们对 UUV的影响,建立海流对 UUV 航速和航向影响的数学模型,并对模型进行计算分析。结果表明,对海洋环境加大研究至关重要。
海洋环境;UUV;作战使用
0 引 言
UUV(水下无人潜航器)在作战使用中会受到诸多海洋环境要素的影响,其性能与海洋环境要素的基本特性和分布规律密切相关。因此,UUV 在水下执行任务时,应该加大对它的海洋环境保障力度,以便充分发挥其效能和功用[1-3]。
影响 UUV 及其装载的武器、探测设备整体技战术性能的海洋气象、海洋水文和海洋地质等方面的自然条件有:UUV的稳定性和操纵性会受到海流、海况和内波的影响;所装载武器的作战效能会受到强流、海况和声场环境的影响;声呐探测效能发挥会受到温跃层、声跃层、内波和中尺度漩涡的严重制约[4]。对海洋环境总的利用原则是“趋利避害”,即对有利的海洋环境多进行利用,而对不利的海洋环境应尽量避开。
1 海流对 UUV的影响
海流影响到 UUV 在水下的航速、航向与机动性能,进而影响到航行安全。当 UUV 航行方向与海流方向一致时,航速增加,可节省时间和燃料;相反,顶流航行时航速会降低,燃料消耗增大,时间延长。当UUV航向与流向成一定角度时,在较大横流作用下,可使其偏离预定航向,特别是在狭窄航道航行或者通过障碍物时,可能会发生航行碰撞,出现航海事故。
1.1数学模型及计算
受海流影响后的UUV 实际航速航向如图1所示,假定 UUV 在某点 O的计划航向为 0°,计划航速VUUV,海域流速为 V流,流向为 α(α 即流向与 UUV 计划航向之间的夹角,取流向从 UUV 左舷流向右舷,0°≤α≤180°,流向从右舷流向左舷时与此对称),UUV 受海流影响后的实际流速为 V相对,实际航向与计划航向之间的夹角为 β,根据矢量合成原理,可得:


图1 受海流影响后的UUV 实际航速航向Fig.1 Realistic velocity and azimuth of UUV affected by ocean curent

式中 β为海流造成的UUV 航向误差。
取 UUV 计划航速 4kn和 6kn,计划航向 0°,海流速度 1kn,2kn,3kn,流向与 UUV 航向夹角在 0 ~180°之间间隔 15°取值,计算得到的UUV 实际航速值、航向误差值分别如表1和表2所示。

表1 UUV 实际航速值Tab.1 Realistic velocity of UUV

表2 UUV 实际航向与计划航向差值(即航向误差大小)Tab.2 D-value about realistic velocity and planned velocity of UUV
1.2计算结果分析
1.2.1海流对 UUV 航速影响分析
从表1可看出,UUV速度和流速值确定时,UUV实际航速随流向与 UUV 航向夹角值 α 增大而减小。UUV速度 6kn,流速 1kn,2kn,3kn 时 UUV 实际航速随夹角值 α的变化情况如图2所示。

图2 UUV速度 6kn,流速 1kn、2kn、3kn 时 UUV 实际航速Fig.2 Realistic velocity of UUV(UUV:6kn,Ocean current:1,2,3kn)
由图2可知,UUV速度确定时,流速越大,UUV实际航速值随流向变化越剧烈,即 UUV 航速误差越大;UUV速度和流速确定时,顺流和逆流对航速大小影响最大,而横向流影响相对较小,从图中可以看出,横向流并非流向与UUV计划航向夹角成 90°的海流,而是略大于 90°,根据式(1),当航速误差为 0时,可得:

即流向满足式(3)时航速误差最小,因此横向流应为流向与 UUV 航向夹角满足式(3)的流。取 UUV速度 6kn,流速 0~3kn,计算航速误差最小的流向如图3所示,在 90°~105°之间。
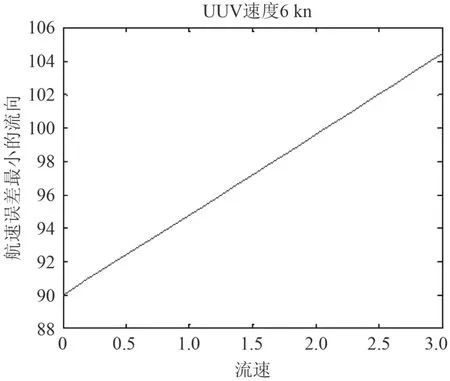
图3 UUV速度 6kn,流速 0~3kn 时航速误差最小的流向Fig.3 The azimuth of ocean current when velocity error is minimum(UUV:6kn,Ocean current:0~3kn)
1.2.2海流对 UUV 航向影响分析
从表2可看出,UUV速度、流向确定时,其航向误差随流速增大而增大(顺流、逆流除外),取 UUV速度 6kn,流向 30°,90°,150°时,航向误差随流速变化情况如图4所示。

图4 航向误差随流速变化情况图Fig.4 The change of azimuth error adapted to the velocity of ocean current
取 UUV速度 6kn,流速 1kn,2kn,3kn,航向误差随航向夹角 α 变化情况如图5所示。
由图5可知,UUV速度、流速确定时,UUV的航向误差随流向与 UUV 航向夹角增大出现先增大再变小趋势,流速越大,航向误差越大,相同流速条件下,接近顺流或逆流时航向误差越小,横向流造成的航向误差较大。

图5 航向误差随航向夹角变化情况图Fig.5 The change of azimuth error adapted to the included angle
2 海况对 UUV的影响
海况是指风力作用下海面的外貌特征,描述海况等级主要依据为海浪的大小。海浪主要对处于水面或近水面状态航行的UUV的航行安全产生影响,主要有以下几个方面:
1)UUV 顶浪航行时的影响
当 UUV 顶浪航行时,海浪会增加航行阻力、降低航速;巨浪的冲击会造成拍底、螺旋桨打空车而损坏UUV 壳体、设备、舵和螺旋桨。同时,由于 UUV 与海浪的相对运动,使两者的相遇周期缩短,从而加剧了UUV的摇摆。
2)UUV 顺浪航行时的影响
当风浪不大时,UUV 顺浪航行可以达到省时省力的效果。若航速小于波速,UUV 又处于波谷之中,则波浪会冲击 UUV 尾部,使推进器和尾轴遭到损害;若航速和波速基本相当时,UUV 位于波浪前部斜面或波谷时易发生偏转,使艇体横对风浪,造成艇体倾斜,对航行安全极为不利。
3)UUV 航向与波浪方向相垂直时的影响
UUV 航行方向与波浪传播方向垂直时将产生横摇,大浪不断地拍打冲击,会加剧艇体的倾斜,容易丧失横稳性,对航行安全造成严重危害。
UUV 在水下航行一定的距离后需要上浮到近水面进行定位,此时 UUV 抗击风浪的能力较差,因此建议采取在航行中进行导航定位,同时提高导航定位效率,降低导航定位时间。
除影响航行安全外,海况还对 UUV 声呐的探测效能产生影响。当海浪大时,海面粗糙程度就大,易形成海面混响,影响水中 UUV 声呐的探测效能。
3 内波对 UUV的影响
海洋内波的存在使海洋内部产生大振幅垂向波动,当 UUV 穿越内波影响区域时,其运动稳定性或运动姿态会发生变化,从而改变其运动轨迹,UUV的安全性会受到影响[5]。停坐在跃层上的UUV,在随跃层处海洋内波做大幅度的上下波动时,当 UUV的艇长尺度远小于内波的波长时,UUV 随着内潮波波浪起伏,一般比较平稳,如图6(a)所示;当 UUV的艇长尺度远大于内波的波长时,内波只能使 UUV 产生幅度较小的上下颠簸,如图6(b)所示;而当 UUV的艇长尺度与内波的波长大小相当时,UUV 随内孤立波的颠簸就比较大,如图6(c)所示,此时深度和纵倾变化剧烈,如果UUV 潜深较浅(接近水面)或者潜深较深(接近海底),容易发生事故。在选取 UUV 航线时,必须利用内波分布特征背景知识,避开海洋内波多发的区域。

图6 内波对 UUV的影响Fig.6 The influence on UUV by internal wave
4 声场特征对 UUV的影响
声速是一个非常重要的海洋环境要素,它决定着声波的传播路线,通常把声波在海洋环境下所呈现的普遍和异常变化特征称之为“水声环境效应”。声波在垂直域可呈现出不同的声速剖面结构[6],对 UUV 会产生不同的影响。
声波以“向海面偏转”和“声道传播”模式传播时,通过反复的折射和反射,声波被束缚在声道和近海面区域,形成声道效应和海面波导效应,在这些声线会聚区 UUV 可进行长距离声呐探测,而声线会聚区以外为声影区,处于该区域的UUV 可避免被主动声呐探测。
负声速梯度易在海表附近形成声盲区,有助于UUV 避开声呐侦察进行潜航和声隐蔽。
利用深海水下声道产生的会聚区效应,可将声呐作用距离扩大至几个会聚区距离上,UUV 声呐可以利用声传播过程中形成的会聚区,增大声呐的探测距离,做到远距离先敌发现。
指挥员应确定作战海区声场特征,根据 UUV所遂行的任务,确定其航行深度,此深度应当有利于保证UUV 最大的隐蔽性或发挥 UUV的最佳观察效能,而不利于敌方的搜索与跟踪。
5 密度跃层对 UUV的影响
密度跃层有正密度跃层和负密度跃层 2 种,如图7所示。正密度跃层是指随深度增加密度逐渐变大,对水下航行比较有利。UUV 在这种海域中执行任务时,便于 UUV的操纵,这种跃层又称为“液体海底”;负密度跃层是指随深度增加密度逐渐降低,这种跃层极不稳定,一旦受到干扰,上层密度大的海水就会下沉,使 UUV 操纵性能变差,造成失控的结果,这种跃层也称为“海底断崖”。

图7 两种密度跃层Fig.7 Two density skip floors
6 结 语
海流、海况等海洋环境要素对 UUV 航行安全和作战效能有着重要的影响。UUV 在作战使用中面临的战场海洋环境是无法控制和改变的,但是可以通过周密的作战计划制定和完善的海洋环境保障建设而趋其利避其害,最大限度发挥装备的战斗力。因此,对 UUV的海洋环境保障建设必须高度重视,超前准备。
[1]莫军,田亚龙.海洋环境对水下航行安全影响的综合评估[J].舰船科学技术,2012,34(10):89-93.MO Jun,TIAN Ya-long.The comprehensive assessment about the marine environment on submarine novigation safety influence[J].Ship Science and Technology,2012,34(10):89-93.
[2]中国船舶重工集团公司.海军武器装备与海战场环境概论[M].北京:海洋出版社,2007.
[3]刘森民,宋剑.潜艇航行安全战场海洋环境评估[J].指挥控制与仿真,2008,30(3):85-88.LIU Sen-min,SONG Jian.Evaluation on battlefield environment for submarine navigation safety[J].Command Control & Simulation,2008,30(3):85-88.
[4]方书甲.海洋环境对海军装备性能的影响分析[J].舰船科学技术,2004,26(2):5-10.FANG Shu-jia.Analysis of the ocean environment influences on the performance of the navy equipment[J].Ship Science and Technology,2004,26(2):5-10.
[5]方欣华,杜涛.海洋内波基础和中国海内波[M].青岛:中国海洋大学出版社,2005.
[6]ETTER P C.水声建模与仿真[M].蔡志明,译.北京:电子工业出版社,2005:19-21.
Research on operational influence of ocean environment on UUV
HE Qing-hai ,DING Wen-qiang ,WU Wen-long
( Navy Submarine Academy,Qingdao 266199,China)
Ocean environment has important impact to the navigational safety and fighting efficiency of UUV.It is taken into account by the command when defining navigation route and depth of UUV.From five aspects(ocean current,ocean surface conditions,internal waves,sound field characteristics,pycnocline),the influences of the ocean environment on the UUV are discussed.The mathematical model of the ocean current impact on speed and azimuth of UUV is established,and the calculation result is analysed.It is very significant to increase research on ocean environment.
ocean environment;UUV;operational use
P731
A
1672-7619(2016)07-0099-04
10.3404/j.issn.1672-7619.2016.07.022
2015-11-05;
2016-01-06
何青海(1985-),男,博士,讲师,研究方向为海洋环境效应及潜艇战术学。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
武汉船舶职业技术学院学报(2022年2期)2022-07-02
舰船科学技术(2022年10期)2022-06-17
水上消防(2022年1期)2022-06-16
新世纪智能(高一语文)(2021年3期)2021-07-16
舰船电子工程(2020年12期)2021-01-19
海洋开发与管理(2020年2期)2020-09-10
民用飞机设计与研究(2019年4期)2019-05-21
舰船科学技术(2018年7期)2018-07-25
百科探秘·海底世界(2017年9期)2018-01-22
