
基于RSSI盲估计的MUAV双天线跟踪系统设计*
2016-09-26 08:28迟晓鹏罗卫兵刘广斌
网络安全与数据管理 2016年11期
迟晓鹏,罗卫兵,刘广斌
(武警工程大学 信息工程系,陕西 西安 710086)
基于RSSI盲估计的MUAV双天线跟踪系统设计*
迟晓鹏,罗卫兵,刘广斌
(武警工程大学 信息工程系,陕西 西安 710086)
天线实时精确地跟踪无人机飞行方向,是有效保证无人机扩展战术网络覆盖范围、提高通信带宽和质量的关键所在。设计了一款基于信号接收强度(RSSI)盲估计跟踪的双天线跟踪系统,使天线主波束时刻对准中继无人机,提高了地面定向天线对中继无人机的初始捕获速度,实现动态跟踪,确保通信信号强度处于优值。实验结果表明,相比单天线系统,该系统捕获灵敏度和跟踪速度明显提高。
微小型无人机;天线;跟踪系统;信号接收强度
引用格式:迟晓鹏,罗卫兵,刘广斌. 基于RSSI盲估计的MUAV双天线跟踪系统设计[J].微型机与应用,2016,35(11):90-92,96.
0 引言
微小型无人机(Micro-Unmanned Aerial Vehicle,MUAV)搭载通信设备升空飞行作为通信中继节点,快速建立战术范围内的宽带网络,可实现各个指挥终端间的数据、语音、图像高速传输[1-2]。研究带自动跟踪能力的地面终端定向天线,有利于进一步扩展战术网络的覆盖范围,提高通信带宽和质量,降低无人机机载设备等技术要求。
当前,关于天线实时高精度自动跟踪MUAV的研究还比较少。参考文献[3]提出的设计方案,依靠提取飞行器上的GPS地理位置和姿态信息进行数据融合,实现自动跟踪,当GPS部分区域服务被关闭或失效时,将严重影响跟踪质量甚至失锁。参考文献[4]采用运动补偿预测对准算法和信道增益反馈对准算法进行异步双模式融合,增加了运算复杂度、计算时间和载荷,不适用于战术部署。参考文献[5]提出采用单天线自动跟踪设计,存在跟踪捕获难度大、跟踪速度慢等弊端,严重影响跟踪平台的整体跟踪性能。本文在参考文献[5]的基础上,以某型MUAV中继通信系统为背景,设计了基于信号接收强度(Received Signal Strength Indication,RSSI)盲估计的MUAV双天线跟踪系统,解决了上述问题。
1 天线跟踪模型与工作原理
1.1天线跟踪模型
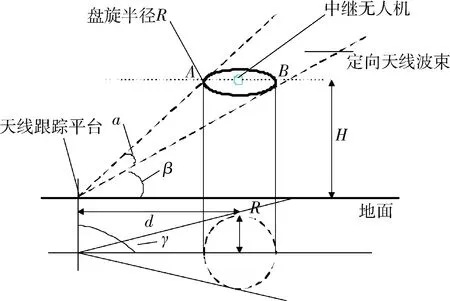
图1 天线跟踪平台跟踪示意图
微小型中继无人机升空飞行后,在空中主要以匀速圆周运动为主,即以半径R在指定空域进行盘旋。地面端定向天线的动态跟踪是指通过调整定向天线在方位面与俯仰面内的指向,使定向天线的主波束时刻对准中继无人机。图1所示为地面终端定向天线的跟踪示意图。其中H为中继无人机升空高度,R为中继无人机盘旋半径,d为地面终端距离中继无人机圆周运动圆心正下方地面处的距离。
1.1.1方位面跟踪分析
分析中继无人机在某一空域盘旋时,天线在方位面的转动角度。如图1所示,确定了参数d和R,便可以通过反正切函数计算出天线在方位面内的转动范围。假设d≥500 m,盘旋半径R=100 m,通过反正切函数可得∠γ≈12°,此时,天线在方位面内转动的角度范围为24°。可得出结论:如果中继无人机的盘旋半径变大,天线转动角度的范围也会变大。但是,当中继无人机起飞后飞至指定空域的飞行过程中,或者因为地面终端组网拓扑结构的变化,需要中继无人机改变飞行空域时,天线自动跟踪平台需要对中继无人机进行捕获,地面端定向天线在方位面内的转动角度是不确定的,需要进行超过180°的旋转才能正确对中继无人机进行跟踪。所以,本文在硬件设计中,将天线转台设计成可在方位面进行360°旋转的转台,保证跟踪过程可以全时进行。
1.1.2俯仰面跟踪分析
俯仰面跟踪是指天线在俯仰面内转动,由图1可知,地面定向天线在俯仰面内的转动角度由参数H、d以及R共同决定。假定中继无人机升空高度H=100 m,以半径R=100 m做圆周运动,地面终端与中继无人机圆周运动圆心正下方地面处的距离d=500 m。当中继无人机飞行到A点时,通过反正切函数可得∠α+∠β≈14°,当中继无人机飞行到B点时,通过反正切函数可得∠β≈9°,此时天线在俯仰面内转动范围∠α≈5°。中继无人机升空高度一定后,地面天线在俯仰面内的转动角度主要由d和R决定。当距离d变大时,天线需要在俯仰面内转动的角度范围越来越小,而且中继无人机的盘旋半径R对俯仰角度的决定作用越来越小。
1.2双天线跟踪原理
地面端不依赖无人机的定位信息,在视距前提下,直接提取地面端天线的信号接收强度作为参考,通过动态扫描搜寻信号强度阈值完成初始捕获。采用步进跟踪算法调整天线指向,实现地面端定向天线对微小型中继无人机的动态跟踪。平台工作原理如图2所示。

图2 平台工作原理图
中继通信系统处于工作状态时,地面端跟踪平台的两个网络电台与空中的网络电台组成通信网络,两个天线同时接收中继无人机的中继信号。跟踪平台在每一时刻可以提取到两个RSSI值,分别记左天线RSSI与右天线RSSI,对这两个RSSI值进行比较,控制转台向RSSI值较大一侧天线方向转动以实现跟踪。
双天线跟踪方向图如图3所示。在双天线跟踪中,天线对无人机的最佳指向是两个天线的主波束范围,天线主波束覆盖范围显著增大,提高了失锁容忍度。并且,当无人机偏离这个宽波束范围时,跟踪平台只需通过比较两个天线RSSI的差值即可确定下一步天线转动方向,提高了跟踪速度。
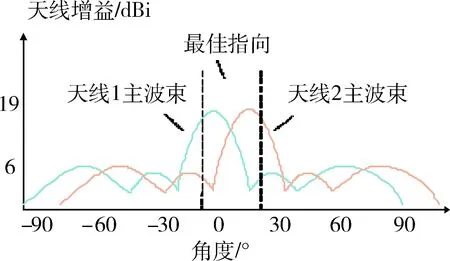
图3 双天线方向图
2 双天线跟踪平台设计
2.1平台跟踪方式
MUAV天线自动跟踪平台的关键问题是平台采用何种跟踪技术。目前,地面天线跟踪技术按照跟踪方式可以分为手动跟踪、程序跟踪和自动跟踪三种[6-7],根据参考信号源的来源不同可以将跟踪技术分为有源跟踪和无源跟踪[8]。
本文研究的MUAV通信中继是典型的点对多点通信方式,其地面天线跟踪系统属于典型的无源跟踪系统,综合分析各种跟踪技术的优缺点,结合MUAV中继通信系统的使用实际,简化系统复杂度,本平台选用基于RSSI盲估计的步进跟踪技术为跟踪控制方案。
2.2硬件设计
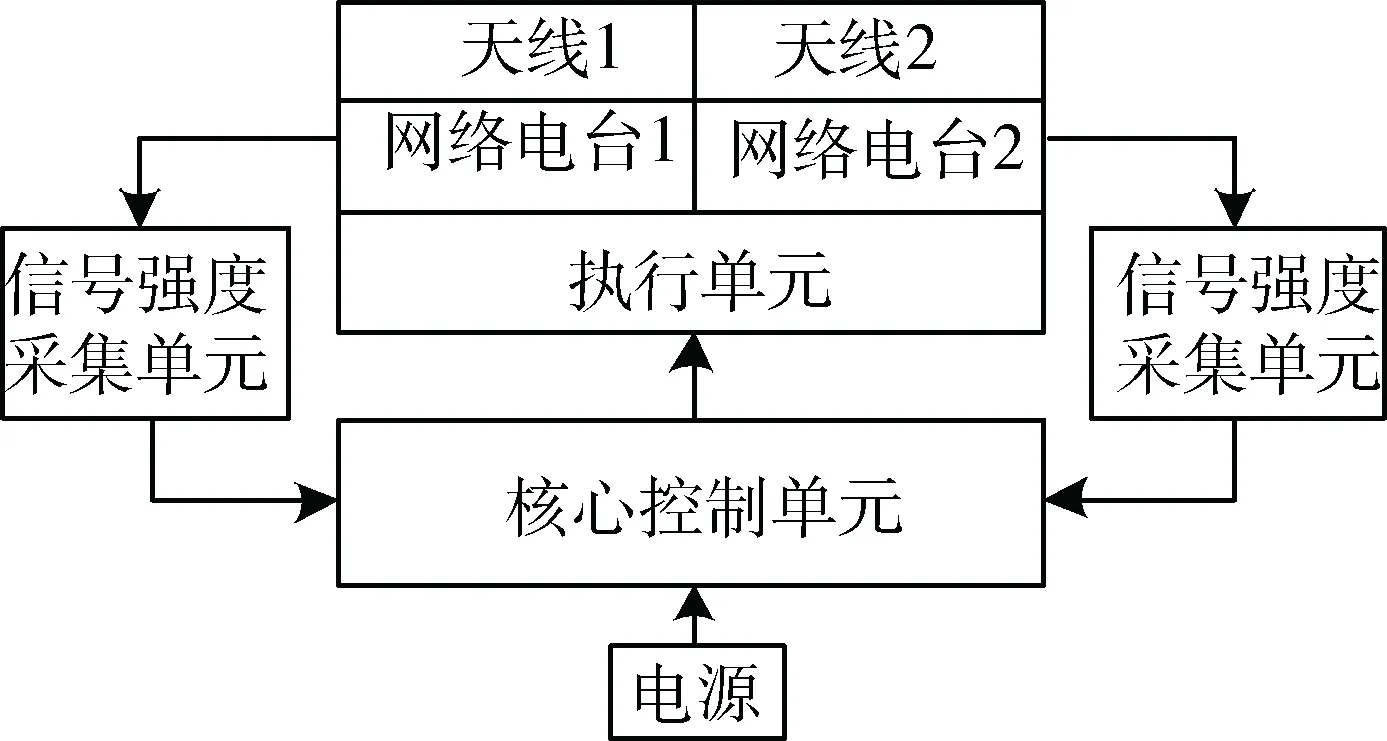
图4 双天线跟踪平台组成示意图
整个跟踪平台由7部分组成,分别是天线、信号强度采集单元、网络电台、核心控制单元、执行单元、功能性扩展单元以及电源。天线是发送和接收通信信号的装置,也是跟踪平台的控制对象[9]。本平台选用2个增益为19 dBi的栅格天线,将两个天线平行放置并安装在转台上,两天线的主波束共同指向同一方向。信号强度提取单元完成天线RSSI的提取。核心控制单元对提取到的天线RSSI进行处理,并向执行单元发出控制指令。执行单元主要作用是接收主控单元指令后驱动天线到达指定位置。双天线跟踪平台组成示意图如图4所示。
3 双天线跟踪流程设计
天线跟踪平台的软件设计采用模块化设计理念,将平台的软件设计分成以下几个模块:RSSI提取模块、RSSI滤波模块、初始捕获模块、动态跟踪模块,如图5所示。
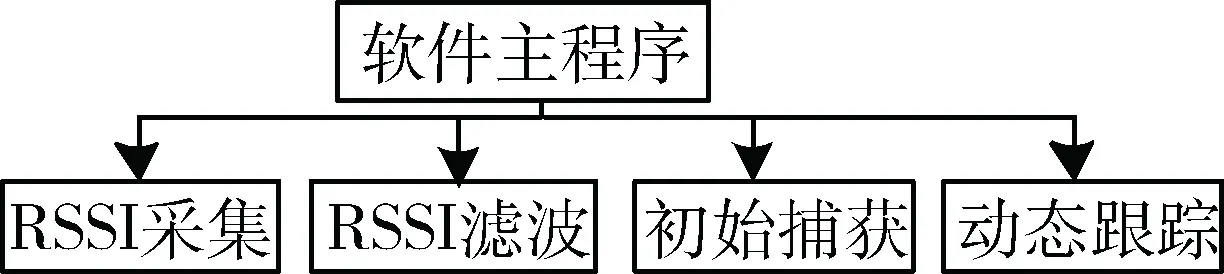
图5 平台软件组成框图
双天线跟踪平台工作时首先进行平台初始化,双天线跟踪初始捕获采用阈值判定法[10],扫描方式采取一维旋转扫描即可。其扫描实现过程为:令天线以一定的转速和步长在方位面内向左(右)连续转动,每次转动后采集两天线的RSSI值。当两个天线的RSSI值达到设置的捕获阈值时,即认为捕获成功,转入动态跟踪。如果在扫描全程中,两个天线的RSSI值始终低于设定的阈值,则认为扫描没有达到要求,初始捕获失败,应重新设定捕获阈值再次进行扫描。
双天线动态跟踪过程为:同时提取两个天线的RSSI值,如果右侧天线的RSSI值大,则控制转台向右转动,双天线的整体指向便会向右;如果左侧天线的RSSI值大,则控制转台向左转动,带动双天线的整体指向向左。跟踪流程图如图6所示。

图6 双天线跟踪流程图
双天线动态跟踪时,两个天线的RSSI是动态变化的,其差值也将发生动态变化。当目标无人机处于最强覆盖区域内时,两天线的RSSI差别不大,其差值较小,可保持天线不动。当目标无人机偏离最强覆盖区域时,两天线的RSSI差别将会变大,需迅速调整天线指向,即提高转台旋转速度。本平台依据两天线的RSSI差值,采取动态选择的思想来实现转速的动态调整控制。在平台初始化阶段,给舵机输入一个固定脉冲宽度调制(Pulse Width Modulation,PWM),令天线在方位面内从左最大限位处转至右最大限位处,记录旋转时间,可通过计算得到转台的一种旋转速度。调整PWM,以同样的方法得到多种旋转速度。本文以三种转速来说明动态调整方法,转速由小到大依次记为s1、s2、s3,如表1所示。在实际应用中,可根据需要测量出多种转速进行调整。

表1 天线旋转速度测量表
确定出不同的转动速度后,在动态跟踪时,根据RSSI差值的大小选择不同的速度转动天线。其流程图如图7所示。

图7 双天线跟踪转速调整流程图
4 双天线跟踪平台试验
对跟踪平台进行实际测试,在相同条件下,分别进行手动跟踪、单天线自动跟踪、双天线自动跟踪。图8所示为三个过程中地面端天线RSSI的变化情况,三角标志符折线的RSSI值为双天线跟踪过程中两天线RSSI值的平均值。从测试结果可以看出,双天线的跟踪速度较单天线的跟踪速度具有改进效果。

图8 跟踪测试结果对比图
为了反映无人机在转场时天线跟踪平台的跟踪效果,保持采样频率不变,以单天线、双天线两种跟踪模式分别进行跟踪,观察RSSI的变化并记录。当RSSI值维持在理想范围时,控制MUAV飞向跟踪平台另一侧,同样在距离地面端500 m、升空高度100 m处的空域以半径R=50 m做匀速圆周运动,观察RSSI的变化并记录,直到RSSI值维持在理想范围时,结束单天线和双天线跟踪。测试结果如图9所示。从测试结果可以看出,单天线跟踪在无人机转场后需要较长时间对无人机进行重新捕获,而双天线跟踪在短时间内即可完成重新捕获,验证了双天线跟踪在跟踪速度方面的优化效果。

图9 无人机转场跟踪测试结果对比图
5 结论
通过双天线跟踪系统设计,增加了中继通信系统的通信容量,提高了中继通信的抗干扰性,使中继通信系统更具稳健性。双天线跟踪平台上天线的整体波束宽度较单天线跟踪有了很大提高,波束的覆盖范围变大,在初始捕获过程中,捕获到目标无人机的概率也就增大。利用双天线增加天线主波束宽度,提高捕获灵敏度、跟踪速度及失锁容忍度,可有效提高平台的跟踪速度与跟踪精度。
[1] 杨尚东,罗卫兵. 微小型无人机平台中继在应急通信中的应用[J]. 飞航导弹,2015(5):68-71.
[2] WADA A, YAMASHITA T, MARUYAMA M. A surveillance system using small unmanned aerial vehicle (UAV) related technologies[J]. NEC Technical Journal, 2015, 8(1): 68-72.
[3] 樊琼剑,高翔,丁吉,等. 一种无人机定向天线稳定跟踪系统[J]. 四川兵工学报,2013,34(4):84-85.
[4] 胡京林,谢文俊,李俊涛,等. 基于模式融合的中继通信无人机定向天线对准[J]. 计算机仿真,2015,32(8):225-229.
[5] 袁征,罗卫兵,武毅. 基于RSSI的微小型无人机天线自动跟踪系统设计[J]. 飞航导弹,2015(8):25-28.
[6] 沈民谊,蔡镇远. 卫星通信天线、溃源、跟踪系统[M]. 北京:人民邮电出版社,2004.
[7] 孙兴邦. 卫星天线自动跟踪算法的研究[D]. 大连:大连海事大学,2008.
[8] 贾飞飞. 有源相控阵雷达中若干天线技术的研究与仿真[D]. 成都:电子科技大学,2010.
[9] Guo Yangzi, PRIOR S D. Development of active directional antennae for use in small UAVs[C]. Innovation, Communication and Engineering, 2013:169-172.
[10] MIN B C, MATSON E T, JUNG J W. Active antenna tracking system with directional antennas for enhancing wireless communication capabilities of a networked robotic system[J/OL]. (2015-05-06)[2016-01-05]. http://onlinelibrary.wiley.com/doi/10.1002/rob.21602/abstract.
Design of MUAV dual-antenna tracking system based on RSSI blind estimation
Chi Xiaopeng,Luo Weibing,Liu Guangbin
(Department of Information Engineering, Engineering University of PAP, Xi’an 710086, China)
The real-time and precise antenna tracking of UAV flight direction is the kernel problem of guaranteeing coverage expansion of the tactical network and improvement on the communication bandwidth and quality. This paper desiged a dual-antenna tracking system based on RSSI blind estimation, which makes the antenna’s main beam aligned with the relaying UAV, and the capture speed of the directional antenna in relaying UAV communication by the orientation antenna is improved, so that the dynamic tracking is realized, and the communication signal is maintained at its best. The experimental results show that capture sensitivity and tracking speed is obviously improved compared with single antenna system.
micro-unmanned aerial vehicle; antenna; tracking system; received signal strength indication
国家自然科学基金(61302051)
TN925
A
10.19358/j.issn.1674- 7720.2016.11.027
2016-01-15)
迟晓鹏(1982-),男,博士研究生,主要研究方向:军事通信。
罗卫兵(1969-),男,教授,博士,博导,主要研究方向:军事通信。
刘广斌(1990-),男,硕士研究生,主要研究方向:军事通信。
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
无线电通信技术(2019年1期)2019-12-24
环球慈善(2019年6期)2019-09-25
中国交通信息化(2017年10期)2017-06-06
河北大学学报(自然科学版)(2016年5期)2016-12-15
电子制作(2016年1期)2016-11-07
中国科技纵横(2016年14期)2016-10-10
学习月刊(2016年19期)2016-07-11
