
车载里程仪参数的实时标定方法
2016-09-23 08:43杨国梁
导航与控制 2016年4期
郝 磊,杨国梁
(西安飞行自动控制研究所,西安710065)
车载里程仪参数的实时标定方法
郝 磊,杨国梁
(西安飞行自动控制研究所,西安710065)
针对里程仪输出的速度(或位置增量),其参数标定误差残差是影响定位定向系统性能的关键因素,传统里程仪参数标定方法需在行车过程中设置精确标志点,且有行驶路线受限的缺点,因此提出一种基于速度量测的定位定向系统误差实时估计和补偿方法。该方法将里程仪刻度系数误差、安装误差残差纳入状态变量进行实时估计并补偿,将惯性导航系统输出的速度与里程仪输出的速度进行对比,构建量测方程。设计跑车试验对该方法进行验证,结果表明该车载里程仪参数的实时标定方法,仅需要在里程仪安装在车辆上后,导航系统做一次正常罗经对准并转惯性/里程仪组合导航模式,在车辆正常行驶过程中,即可自动标定出里程仪参数误差,具有自主、灵活简便、精度高的特点,同时提高了惯性/里程仪组合导航系统定位精度。
组合导航;实时标定;里程仪;捷联惯导系统
0 引言
车载定位定向系统作为军队现代化建设、国民经济发展的一种重要设备,以其优越的性能,广泛应用于军民领域。工程上一般采用惯性导航系统和GPS组成惯性/GPS组合导航系统,以实时精确地提供车辆的位置、速度和姿态信息。虽然GPS精度高,但其信号质量对使用环境要求高,且受制于美国,不能完全依赖。里程仪作为一种测量车辆行驶路程的测量设备,利用其速度输出作为信息源,与惯性导航系统组成惯性/里程仪组合导航系统,可以有效地抑制惯性导航系统误差随时间的积累,提高导航精度。该方法与惯性/ GPS组合导航系统相比,具有不受外界环境干扰,完全自主的优点。
在车载惯性/里程仪组合导航系统中,随着轮胎温度、充气压力以及表面磨损等因素的影响,里程仪刻度系数会发生较大变化,同时,里程仪安装在车辆上后,与惯性导航系统之间不可避免地存在安装误差。里程仪刻度系数误差和安装误差是制约惯性/里程仪组合导航系统精度的主要因素,必须对其精确标定。
传统标定方法需要在一段平直路面上,通过差分GPS设置两个精确标志点,车辆在这两个标志点之间平稳通过,来完成里程仪参数的标定,标定过程一般耗时较长,而且行驶路面要求平直。针对以上问题,本文提出了一种在无精确标志点的情况下,里程仪参数的快速标定方法,通过将惯性导航系统和里程仪组成的惯性/里程仪组合导航系统,用二者的速度误差作为量测对里程仪参数进行精确估计,以完成里程仪参数的快速标定,同时提高惯性/里程仪组合导航系统的精度。
1 标定原理与方法
车载惯性导航系统有其运动特殊性,车辆在行驶过程中,由于车辆轮胎始终与地面接触,这意味着车辆不存在侧滑和弹跳情况下车辆的侧向速度和垂向速度始终为零。基于惯性/里程仪速度误差量测的组合导航系统也是在这种假设下进行的。在列写状态向量时,将里程仪的刻度系数误差、与惯导之间的安装误差等系统误差也写入状态向量当中,起到实时估计补偿作用,提高定位定向系统精度。
1.1坐标系定义
本文定义i系为地心惯性坐标系;e系为地球坐标系;n系为导航坐标系,选为东北天坐标系;b系为SINS载体坐标系,为右前上坐标系;m系为里程仪坐标系,与车体坐标系重合。m系相对于b系存在一定的安装偏角,即里程仪的安装偏角α=[αθαγαφ],分别为俯仰安装误差、滚转安装误差与航向安装误差。
1.2惯性/里程仪组合导航误差模型
(1)SINS误差模型本文认为标定后惯性级(陀螺漂移稳定性约0.01(°)/h)的SINS可以忽略陀螺仪组件的刻度误差δKG及安装误差角δG,即中只考虑陀螺的等效漂移εb中的常值项和测量噪声项可以忽略加速度计组件的刻度误差δKA及器件安装偏差δA,即δfb中只考虑其等效常值偏置和测量噪声项,则SINS系统的误差方程如下:

其中,


(2)里程仪速度输出误差模型
设里程仪刻度系数为Kod,单位时间内输出的脉冲数为Nod,则里程仪速度在m系中表示为:

其在SINS系中的投影为:

从式(3)可以看出里程仪输出速度与横滚安装误差角无关。忽略高度通道后,定位定向系统精度主要受航向安装误差影响。忽略俯仰安装误差,即假设α=αφ,则里程仪速度输出在导航系下的投影为:

对式(4)求微分,得里程仪输出的速度误差为:

1.3惯性/里程仪组合导航卡尔曼滤波器设计
建立状态方程与量测方程,利用卡尔曼滤波进行估计,实现对各种误差的再现估计并进行补偿。
(1)状态方程
根据捷联惯性导航系统的误差模型以及里程仪速度输出的误差模型,考虑惯性器件误差为随机常值与白噪声之和;里程仪安装误差α与刻度系数误差δKod在初始标定后保持不变,即:

忽略高度通道,取15维SINS/OD组合导航系统的状态变量:

各状态变量分别为系统姿态误差、速度误差、位置误差、陀螺漂移、加计零偏、里程仪刻度系数误差和里程仪安装误差;建立组合导航系统状态方程:

根据式(1)和式(6),状态矩阵F为:

其中,


ωN、ωU为北向、天向地球自转角速度;φ、h为当地纬度、高度;VE、VN为东向、北向速度;fE、fN、fU为加计输出在东北天方向上的投影;C11、C12、C13、 C21、 C22、 C23为捷联姿态阵中对应的元素。
状态噪声矩阵为:

(2)量测方程
如图1所示的速度量测方案,利用SINS解算得到的姿态矩阵,将 n系下捷联惯性导航速度矢量与OD速度在n系投影之差作为量测方程,因此所得SINS/OD组合系统误差模型的状态矢量中多了OD刻度误差因数δK^和车载安装误差δα。od

图1 基于速度误差量测的INS/OD组合导航方案Fig.1 Integrated navigation method of the positioning and orientation base measurement of velocity error
由车载惯性导航系统和里程仪输出的速度之差构造观测量,得到组合导航系统的量测方程为:

其中,观测矩阵为:H=[02×2I2×202×9H2×2]。
由式(1)和式(5)可得:
C11、C12、C21、C22为系统姿态矩阵元素;Nod为里程仪脉冲数;Vod为里程仪速度;Kod=Kod0-其中,Kod为里程仪刻度系数,Kod0为初始里程仪刻度系数,Kod0=πD/N,N为轮胎转动一周里程仪输出的脉冲数,D为初始时刻轮胎直径;Nod为里程仪当前1s内脉冲数增量。
量测噪声矩阵
其中,σv为速度量测噪声。
2 仿真结果与分析
2.1仿真条件
系统仿真误差设为:仿真时间2h,行车路线为直线。陀螺零偏稳定性为0.01(°)/h,角速率随机游走为 0.001(°)/h,加速度计零偏稳定性100μg,加速度随机游走系数为10μg/h ;里程仪刻度系数误差 δKod=0.01% ,速度量化噪声0.1m/s;初始俯仰、横滚姿态误差10′,初始航向误差40′,初始位置、速度误差为0。
2.2结果分析
车载定位定向系统在仿真2h内有很好的定位精度,且其定位精度与系统性能表现出良好的长期稳定性:1)如图2所示,通过标定可以很好地估出里程仪的刻度系数误差,并保持在 0.12× 10-3,与设置的刻度系数误差相近,说明本里程仪参数的标定方法可信。2)如图3所示,水平定位精度优于±50m,且定位误差稳定在1σ包络线以内。说明本方法可以提高系统定位精度。
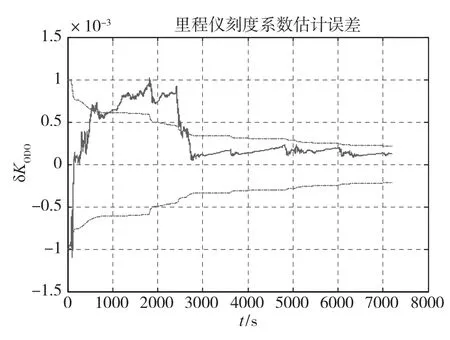
图2 仿真刻度系数误差Fig.2 Error of simulation odometer scale factor
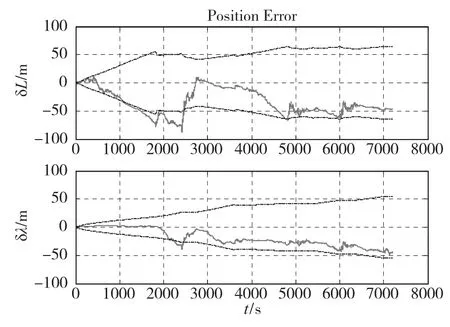
图3 仿真位置误差Fig.3 Error of simulation position
3 试验验证
设计了跑车试验,来验证本文所述方法的有效性,该里程仪参数的实时标定方法的流程图如图4所示。
跑车实验平台采用三菱FREECA改装车完成,实验平台包括捷联惯导与光电里程仪,其中惯导采用光纤陀螺和石英挠性加计,光纤陀螺漂移小于0.01(°)/h,加计零偏小于1×10-4g。将定位定向导航系统安装在试验车上,采用电瓶供电,并用工控机监控导航系统状态。
跑车试验先在一段平直路线上进行初始标定,确定初始里程计刻度系数和安装误差。我们选择在西安子午大道上进行初始标定,全段路线长5km,进行5组试验,标定结果分别为:刻度系数误差K0=0.012915,安装误差α=0.2143,然后通过跑车导航试验进行刻度误差与安装偏角实时修正,进行精标。整个跑车实验在西宝高速进行,全程大约40km,持续1h。实验过程中惯导安装在实验车上进行初始对准,采集10min静态数据。试验中以GPS信息作为基准信息。
在速度误差为量测的组合导航算法中分别处理考虑里程仪参数误差以及未考虑里程仪参数误差的数据,得到如图5~图9所示结果。

图4 里程仪参数实时标定方法流程图Fig.4 Flow chat of odometer calibration

图5 行车轨迹Fig.5 Running trace
从图6、图7中可以看出,由于跑车路线不同于仿真的理想情况,且真实跑车环境下会出现侧滑、跳跃等扰动情况,尤其在转弯过程中这种情况更为剧烈,以至于出现位置误差突然变大的情况。在不考虑里程仪参数误差时经纬度定位误差最大分别为43m、20m,而考虑里程仪误差参数并实时估计补偿后经纬度定位误差最大分别为25m、20m。所以惯性/里程仪组合导航系统在考虑里程仪参数误差时可以提高定位精度,表明该方法有效。其中纬度方向上性能没有显著提高是因为载车主要行驶在东西方向,而里程仪参数初始标定时精度相对较高,在载车过程中变化的主要是刻度系数,安装偏角经过初始补偿已经相对稳定,所以参数实时补偿过程中主要提升经度方向上的定位精度,纬度方向上定位性能没有明显提升。但两图对比结果还是表明里程仪参数误差对定位精度有影响。
从图8、图9可以看出,该快速标定方法可以快速实时标定出里程仪刻度系数误差与安装偏角误差,从而为提高系统定位能力提供条件。
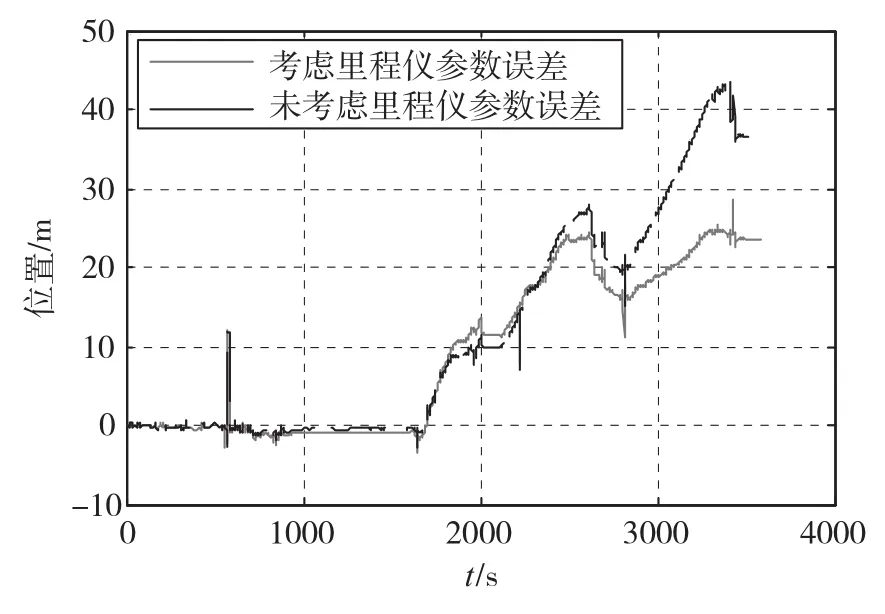
图6 经度误差曲线Fig.6 Longitude error curve

图7 纬度误差曲线Fig.7 Latitude error curve

图8 刻度系数误差Fig.8 Error of the odometer scale factor

图9 安装偏角误差Fig.9 Error of the install residuals
为进一步验证算法的可靠性,在同一路面共进行了7次实验,表1为另外6次的实验结果。其中,标定误差为与载波差分GPS的比对值,D为行车里程,D=40km。

表1 另外六次的实验结果Table 1 Results of the other six experiments
4 结论
本文提出一种基于SINS/OD速度误差量测组合的定位定向误差快速标定方法,通过跑车试验对该方法进行验证,得到如下结论:1)采用速度误差为量测实现SINS/OD组合导航时,将里程仪参数误差扩维到状态变量进行实时估计并补偿,在车辆正常行驶过程中就可以实现对里程仪参数的精确标定,该方法克服传统方法耗时长、对行驶路面有限制等缺点,且算法不依赖于外界信息,有较强的抗干扰性和可靠性。2)速度误差量测组合方法可以有效地抑制位置误差发散趋势,提高组合导航系统的定位定向精度。
[1] 以光衢.惯性导航原理[M].北京:航空工业出版社,1987. YI Guang-qu.Inertia navigation theory[M].Beijing:Aviation Industry Press,1987.
[2] 张小跃,张春熹,宋凝芳.基于组合导航技术的光纤捷联系统在线标定[J].航空学报,2008,29(6):1656-1659. ZHANGXiao-yue,ZHANGChun-xi,SONGNingfang.Online calibration of FOG strapdown system based on integrated navigation technology[J].Acta Aeronautica Et Astronautica Sinica,2008,29(6):1656-1659.
[3] 高文,张京娟,谢淑香,冯培德.伪卫星/惯性/里程仪组合高精度地面车导航技术[J].弹箭与制导学报,2006,26(2):32-34. GAO Wen,ZHANG Jing-juan,XIE Shu-xiang,FENG Pei-de.Pseudo-satellite/INS/odometerintegratedhigh precision navigation technology for vehicle[J].Journal of Projectiles,Rockets,Missiles and Guidance,2006,26 (2):32-34.
[4] 吉翠萍,雷宏杰,冯培德.捷联惯性/里程仪组合定位定向系统方案设计及仿真计算[J].弹箭与制导学报,2008,28(4):55-58. JI Cui-ping,LEI Hong-jie,FENG Pei-de.Scheme design and simulation of hybrid navigation system composed of a strapdown inertial reference system and an odometer[J]. Journal of Projectiles,Rockets,Missiles and Guidance,2008,28(4):55-58.
[5] 朱立彬,王玮.车辆导航系统中里程计标度因数的自标定[J].汽车工程,2013,35(5):472-476. ZHU Li-bin,WANG Wei.Self-calibration of odometer's scale factor in vehicle navigation system[J].Automotive Engineering,2013,35(5):472-476.
[6] 李磊磊,谢玲.自行火炮导航系统标定试验分析[J].火炮发射与控制学报,2006(3):44-46. LI Lei-lei,XIE Ling.Calibration test analysis in navigation system of self-propelled gun[J].Journal of Gun Launch& Control,2006(3):44-46.
[7] 张金红,李岁劳,杨洪友.差分GPS辅助里程仪标定刻度因子[J].测控技术,2007,26(7):20-22+25. ZHANG Jin-hong,LI Sui-lao,YANG Hong-you.Calibration of odometer scale factor with differential GPS[J].Measurement&Control Technology,2007,26(7):20-22+25.
A Real-time Calibration for Land Vehicle Odometer Parameter
HAO Lei,YANG Guo-liang
(AVIC Xi'an Flight Automatic Control Research Institute,Xi'an 710065)
The odometer's output is velocity(or position increment),and the odometer calibration residual is the critical factor to determine the performance of the vehicular position and orientation.In traditional way of vehicle odometer calibration,which needs to set up precise land markers and have the limitation of exercising the route.To solve this problem,a real-time error-estimation and compensation method of the positioning and orientation is proposed base measurement of velocity error. This method thinks about the error of the odometer scale factor and the install residuals.Two kinds of velocity which come from the inertial navigation system and the odometer's output respectively are used to construct the measurement equation.Accomplishing a car test to verify the feasibility of this method,and the results show that:After the car odometer is installed into a vehicle,a normal compass alignment and turn inertia/odometer integrated navigation mode only need to be done by the navigation system.During the state of normal running,OD scale factor and install residuals could be demarcated automatically.The new method has the features of autonomy,flexibility and convenience,high precision.It can be applied to odometer parameter real-time calibration,also improving the precising of inertia/odometer integrated navigation system.
integrated navigation system;real-time calibration;odometer;SINS
TN967.1
A
1674-5558(2016)02-01212
10.3969/j.issn.1674-5558.2016.04.010
2015-12-02
郝磊,男,硕士,研究方向为导航、制导与控制。
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
学苑创造·A版(2019年9期)2019-11-07
学苑创造·B版(2017年1期)2017-02-21
学苑创造·B版(2017年1期)2017-02-21
百科探秘·航空航天(2016年9期)2016-12-01
小天使·二年级语数英综合(2016年9期)2016-05-14
太空探索(2015年5期)2015-07-12
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
