
一种基于锁角环路的DOA估计定位跟踪
2016-09-21 00:51程秀芝陈立爱
安徽大学学报(自然科学版) 2016年5期
程秀芝,何 平,陈立爱
(安徽建筑大学 机械与电气工程学院,安徽 合肥 230022)
一种基于锁角环路的DOA估计定位跟踪
程秀芝,何平,陈立爱
(安徽建筑大学 机械与电气工程学院,安徽 合肥 230022)
为了解决传统移动目标波达方向估计定位跟踪过程中,实时性差、精度低、计算复杂度高的问题,提出一种基于锁角环路的DOA估计定位跟踪算法.该算法采用锁角环路(DiLL)结构实现信号的波达方向(DOA)估计和定位,并实时随信号角度变化自动调整方向,以实现信号方位的跟踪.为了减小非线性和噪声对定位跟踪性能的影响,通过UKF滤波将估计目标信号的干扰消除,以提高信号方位定位跟踪的精度及系统的稳定性.仿真结果表明:该算法能够得到较高分辨率的DOA估计信号,能够对多个移动目标的方位进行有效定位跟踪,系统的精度、效率和稳定性也较高.
锁角环路;DOA估计;UKF滤波;定位跟踪
移动目标的定位跟踪涉及角度、角度变化率以及多普勒频率变化率等观测状态变量,它们大都遵循非线性变化.在传统的DOA估计定位中,以MUSIC[1]、ESPRIT[2]等为基础的估计算法广泛应用于信号的波达方向估计.MUSIC算法要进行特征分解和谱峰搜索[3],计算量大,系统要求的实时性很高时就难以达到要求.ESPRIT算法将接收信号分解为两个子阵,利用不同方向信号到达两子阵间的相位差来估计信号的DOA[4],虽然运算量比MUSIC小,但是预测精度和分辨率较低,实时性也较差.因此,传统的定位跟踪算法精度和效率低下、计算复杂、稳定性不好等缺点影响了通信系统的性能.为了解决传统DOA估计的缺陷, Seo等[5]提出了利用锁角环路(DiLL)对目标信号DOA进行估计,此算法利用误差信号不断迭代来更新估计信号,效果不错,算法复杂度也大大降低,但由于系统非线性和噪声对信号的影响,导致目标定位跟踪效果并不太理想.
对非线性系统滤波的处理方式,传统的有扩展卡尔曼滤波[6](extended Kalman filter,简称EKF)和修正增益扩展卡尔曼滤波[7-8](modified gain EKF,简称MGEKF)算法.扩展卡尔曼滤波类算法是将非线性观测方程进行泰勒展开后得到的一次项,来对非线性方程做线性化处理,再进行滤波跟踪,这可能导致线性化误差、滤波发散、性能下降等缺陷,因此只能适用于非线性较弱及近似高斯环境.无迹卡尔曼滤波算法基于无损变换[9-10](unscented transformation,简称UT),选择均值和协方差不变条件下的Sigma样点集合,用非线性变换后的样点统计量来估计状态向量的概率密度分布,利用确定性采样替代PF随机采样,消除了EKF线性化过程中忽略高阶项带来的误差,相对前两种以EKF为基础的滤波算法,它的收敛速度和滤波跟踪性能有进一步的提高,系统的稳定性也进一步增强.若在系统后端利用高效的UKF算法对信号进行滤波处理,可有效减少噪声的影响,降低系统的计算复杂度,提高非线性系统定位跟踪的精度和效率,实现对移动目标的快速精确跟踪.因此,笔者在对信号波达方向进行估计的基础上,拟用滤波的方式对信号进行处理,以达到精确跟踪的目的.
1 系统模型
图1为系统定位跟踪模型.前端的接收机对不同到达方向的信号进行空间采样,且将其下变频至基带信号.信号滤波器对信号进行空间滤波,包括初步判断、识别用户信号、抑制噪声.将天线接收到的信号送入基于锁角环路的DOA估计器,进行估计定位追踪.使用UKF滤波跟踪算法对估计信号进行处理,利用递归式贝叶斯估计精确逼近信号的状态.
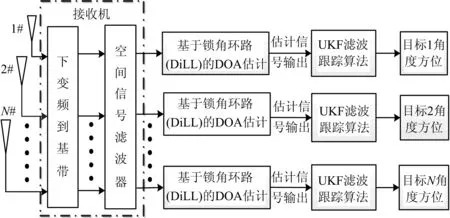
图1 系统定位跟踪模型Fig.1 Locating and tracking model
定位跟踪模型中,空间信号滤波器由基带低通滤波器和一组正交权重系数构成的波束空间矩阵组成.图2为波束空间矩阵.图2中,横轴μ=sinθ,代表在0~360°范围内分布的多重正交空间波束.让基带信号通过不同功率波束器进行筛选,若获得较大的功率输出,说明信号必定在这个功率波束器形成的2个空间角之间,由此得到信号波达方向的角度分布区间,实现对移动信号源DOA分布范围的初步判断、识别,为下一步信号的精确定位提供数据.

图2 波束空间矩阵Fig.2 Beam space matrix

环路输出信号包含高斯噪声,因而通信系统受到非线性的影响,同时环路输出的估计信号数量远远大于采样数量,这些均导致由锁角环路得到的DOA估计的方位信号并不十分精确,所以需要进一步的滤波处理.
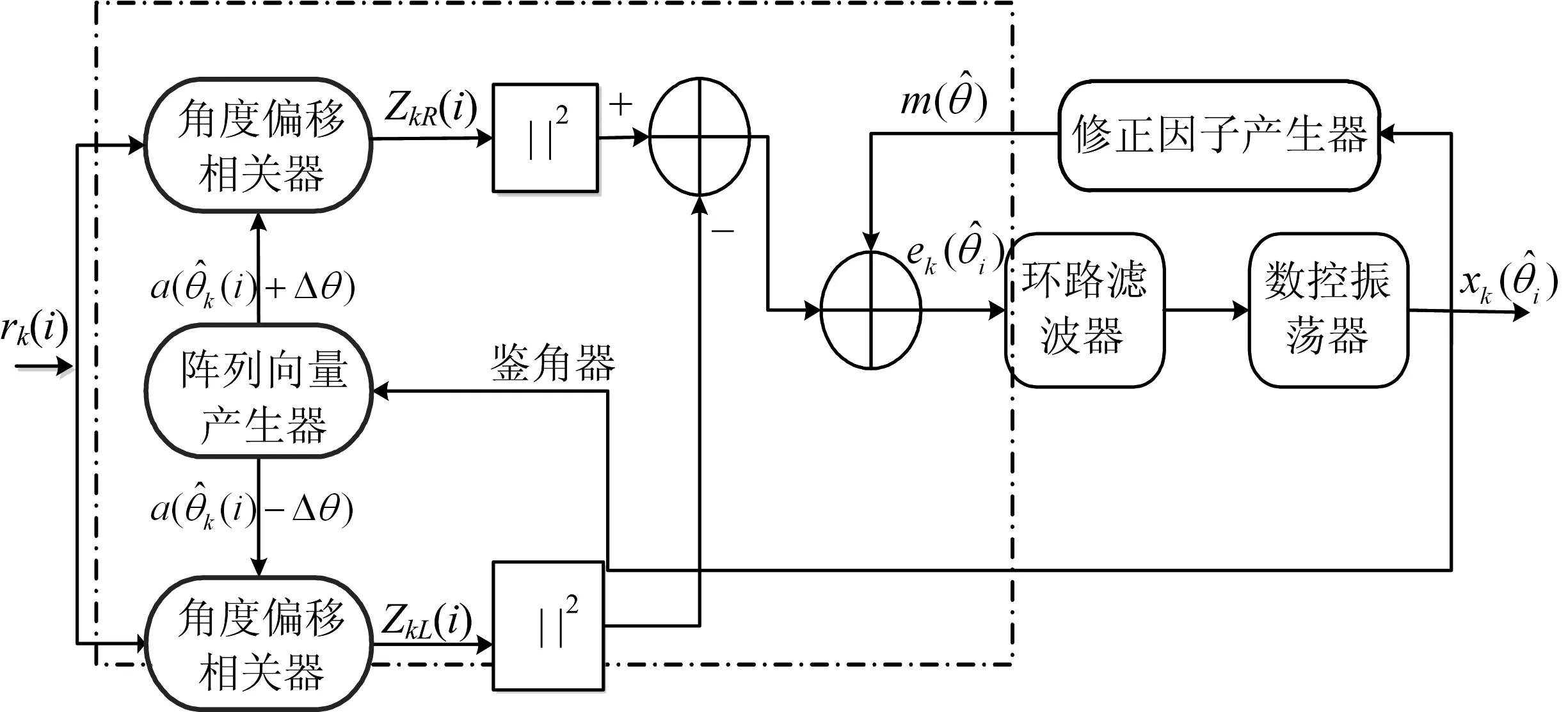
图3 锁角环路跟踪器Fig.3 Tracking device in the DiLL
2 基于锁角环路的DOA估计算法
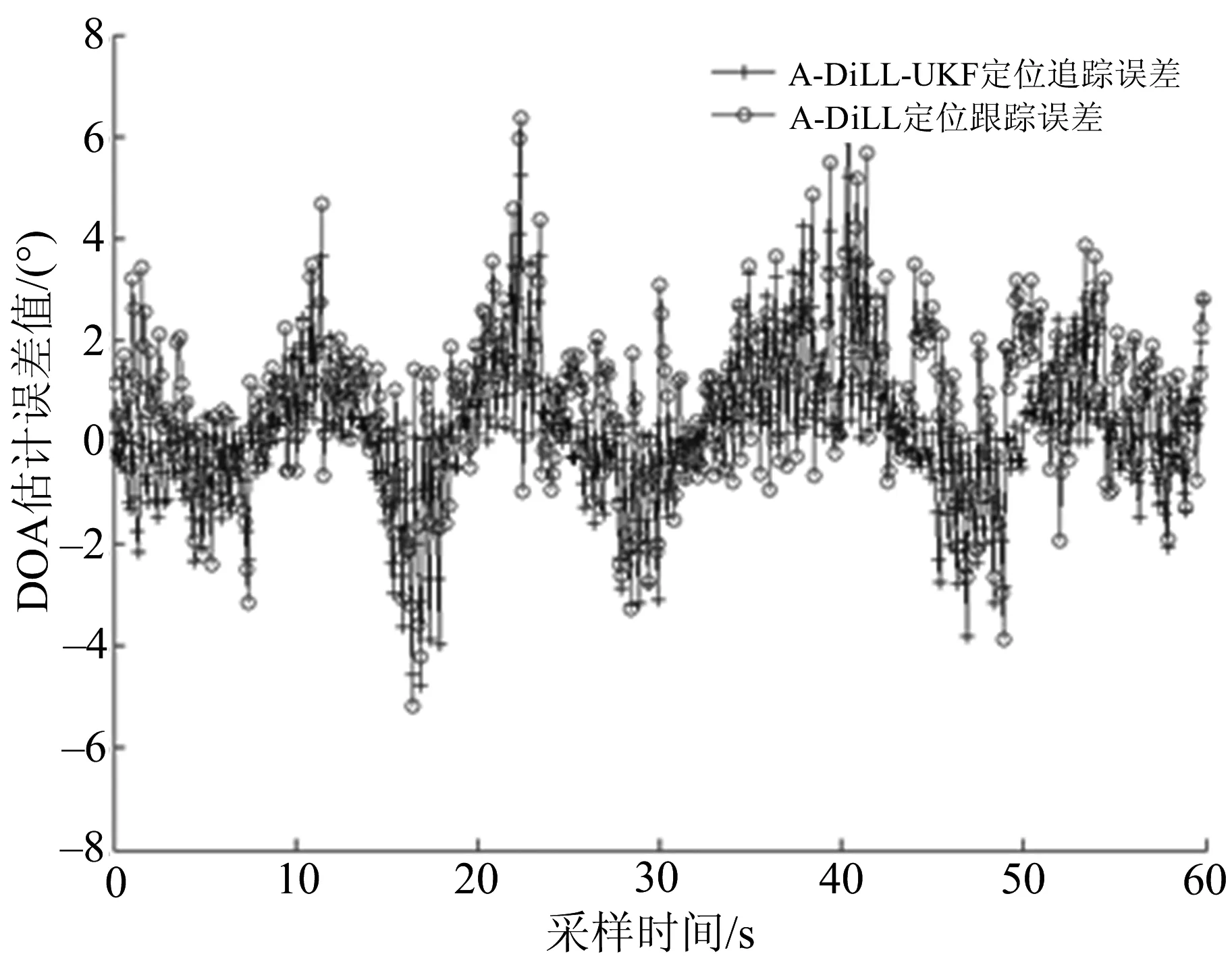
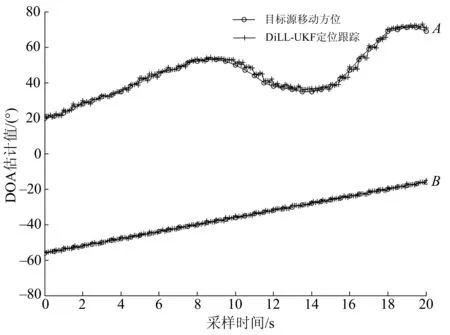
假设共有K个窄带信号入射到有N(K (1) (2) (3) (4) (5) 在锁角环路跟踪器中,将相关器输出的两信号模平方后相减,可得误差信号为 (6) 其中 (7) (8) (9) (10) 为了分析DOA估计的性能,定义第i次时刻的DOA估计误差为 (11) 由式(9),(10),可得在第i+1次时刻的估计误差为 (12) (13) 由式(12)可得εk(i+1)的值为 (14) 对式(14)进行Z变换,得到Z域的DOA估计误差函数为 (15) (16) 由于系统锁角环路不能有效消除高斯噪声的影响,对于目标跟踪还存在较大的误差,稳定性也较差.为了有效地对移动目标进行迅速、精确跟踪,需要采用UKF滤波对接收到的信号进行滤波.将UT变换应用于卡尔曼滤波,实现信号的均值和协方差更精确的估计. 接收信号的非线性离散系统的状态方程和测量方程分别[14]为 (17) 其中:Xi+1,Xi为i+1,i采样时刻的状态向量;Yi为观测向量;vi,ni均为噪声向量. 下面将通过UKF滤波对Xk进行估计. (1) 初始化为 (18) (2) 变量的样点值为 (19) (3) 预测状态变换为 (20) 其中:Rv为系统状态噪声方差. (4) 预测测量变换为 (21) 其中:Rn为系统测量噪声方差. (5) 预测测量互协方差为 (22) (6) 权增益及状态的更新为 (23) 对基于锁角环路DOA估计的定位跟踪进行仿真.设系统天线的阵元数为16,阵元之间的距离为半个波长,信噪比为5dB.假设目标信号源A在20°左右的方向入射到天线系统,经过空间滤波器识别后进入到锁角环路进行DOA估计定位跟踪.图4为目标源A的移动方位及其DiLL定位跟踪.由图4可知,信号的DOA估计值在真实值上下波动,由于受系统非线性和噪声的影响,波动范围比较大,估计精度较低. 图4 目标源A的移动方位及其DiLL定位跟踪Fig.4 Moving direction and DiLL location tracking of target source A 图5 目标源A的移动方位及其DiLL-UKF定位跟踪Fig.5 Moving direction and DiLL-UKF location tracking of target source A 图6 DOA估计误差Fig.6 Estimated error of DOA 在系统中再增加另一移动信号源B,在-57°方向,信号源B做匀速圆周运动,角速度相对较慢.图7为2个目标源的DOA估计定位跟踪.由图7可看出,系统可实现多个目标DOA估计定位跟踪,性能也较精确和稳定. 图7 2个目标源的移动方位及其DiLL-UKF定位跟踪Fig.7 Moving direction and DiLL-UKF location tracking of 2 targets 笔者提出的基于锁角环路DOA估计定位跟踪算法,不但能实现移动目标DOA估计,而且对目标方位能够实时定位跟踪.为了消除非线性和噪声对系统误差的影响,选择基于UT变换的UKF滤波对DOA估计信号进行滤波,获得了精度较高的DOA估计定位跟踪.同时,与传统的DOA估计定位跟踪比较,其计算复杂度大大降低,系统的稳定性也较高. [1]LE B N, MIRON S,MARS J I. MUSIC algorithm for vector-sensors array using biquaternions[J]. IEEE Trans on Signal Processing, 2007, 55 (9): 4523-4533. [2]BADEAU R, RICHARD G, DAVID B. Performance of ESPRIT for estimating mixtures of complex exponentials modulated by polynomials[J]. IEEE Trans on Signal Processing, 2008, 56 (2): 492-504. [3]位寅生, 谭久彬, 郭荣. MUSIC空间谱估计并行运算算法[J]. 系统工程与电子技术, 2012, 34 (1): 12-16. [4]赵仙红, 杨俊, 赵仙玲. 提高智能天线DOA估计准确性的研究[J]. 传感技术学报, 2007, 20 (1): 132-137. [5]SEO D Y, MIN S Y, LEE K B, et al. Coherent DiLL for direction of arrival estimation[C]//ICSP’02 Proceedings IEEE, 2002: 334-337. [6]邓胡滨, 张磊, 吴颖, 等.基于卡尔曼滤波算法的轨迹估计研究[J]. 传感器与微系统, 2012, 31 (5): 4-7. [7]SONG T L,SPEYER J L.A stochastic analysis of a modified gain extended Kalman filter with applications to estimation with bearings only measurements[J]. IEEE Trans on Automatic Control, 1985, 30 (10): 940-949. [8]张品秀, 黄操军, 乔相伟. 基于自适应扩展kalman滤波的SINS/GPS深组合研究[J]. 传感技术学报, 2010, 23 (3): 408-412. [9]刘翔, 宋常建, 胡磊, 等. 基于无迹卡尔曼滤波的单站混合定位跟踪算法[J]. 探测与控制学报, 2012, 34 (3): 71-75. [10]JULIER S J, UHLMANN J K. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE, 2004, 92 (3): 401-422. [11]MIN S Y, SEO D Y, LEE K B, et al. Direction-of-arrival tracking scheme for DS/CDMA systems: direction lock loop[J]. IEEE Transactions on Wireless Communication, 2004, 3 (1): 191-202. [12]MIN S Y, LEE K B, LEE Y H. Direction of arrival estimation algorithm: direction lock loop[C]// In Process CDMA International Conference, 2002: 256-314. [13]JOSEPH C L, THEODORE S R. 无线通信中的智能天线:IS-95和第3代CDMA应用[M]. 马凉, 译.北京:机械工业出版社, 2002. [14]王安定, 裘渔洋, 余燕平, 等. 基于锁角环路的空间多目标跟踪算法[J]. 浙江大学学报 (工学版), 2011, 45 (6): 1052-1056. (责任编辑郑小虎) DOA estimation positioning and tracking of the direction lock loop CHENG Xiuzhi, HE Ping, CHEN Liai (School of Mechanical and Electrical Engineering, Anhui Jianzhu University, Hefei 230022, China) In order to solve poor real-time performance, low accuracy, high complexity of the traditional moving target direction of arrival(DOA) in the process of locating and tracking, an algorithm based on the direction lock loop of the DOA estimation locating and tracking was proposed. The algorithm adopted direction lock loop (DiLL) structure to realize signal of direction of arrival (DOA) estimation and orientation, and followed signal angle changes in the way of real-time dynamic to adjust direction of shift automatically, achieving the goal of the signal angle position tracking. Meanwhile, in order to reduce the influence of nonlinear and noise for locating and tracking performance, the UKF filter was designed to eliminate interference of the estimated target signal, to improve accuracy of the signal position tracking and stability of system. Simulation results proved that the algorithm could not only get high resolution DOA estimate signal, but also could achieve multiple mobile target azimuth location tracking effectively, in consequence , the accuracy, efficiency and stability of the system were enhanced. direction lock loop; DOA estimate; UKF filtering; location and tracking 10.3969/j.issn.1000-2162.2016.05.010 2016-04-30 安徽省科技攻关计划项目(1301022066);安徽省自然科学基金资助项目(KJ2014A040, KJ2016A158);安徽建筑大学硕博基金资助项目(K02667) 程秀芝(1975-),女,安徽宿州人,安徽建筑大学讲师. TP97 A 1000-2162(2016)05-0057-08






3 UKF滤波

4 仿真与分析



5 结束语
猜你喜欢
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
现代防御技术(2017年2期)2017-05-13
电子世界(2016年18期)2016-10-24
电测与仪表(2016年21期)2016-04-11
电源技术(2016年9期)2016-02-27
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
燕山大学学报(2014年2期)2014-03-11
