
基于UWB TDOA测距的井下动态定位方法
2016-09-19 01:22杨广松郝雨时王长强徐爱功
导航定位学报 2016年3期
隋 心,杨广松,郝雨时,王长强,徐爱功
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2.武汉大学 卫星导航定位技术研究中心,湖北 武汉 430079)
基于UWB TDOA测距的井下动态定位方法
隋心1,2,杨广松1,郝雨时1,王长强1,徐爱功1
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新123000;2.武汉大学 卫星导航定位技术研究中心,湖北 武汉430079)
针对井下移动目标精确定位和跟踪过程中所存在的传输距离短、抗多径效应差、定位精度低等问题,提出一种适合于井下环境的动态定位方法,并使用精度因子对基准站几何分布进行评价,形成一套完整的井下移动目标高精度定位系统。最后使用搭建的UWB移动定位平台进行模拟井下环境定位测试,实验结果表明基于该平台可使井下定位精度达亚dm级,优于当前其他井下无线定位系统精度。
超宽带;扩展卡拉曼滤波;井下巷道;到达时间差;精度因子
0 引言
我国煤矿安全技术与装备技术总体水平不高,造成矿井事故隐患多、矿井防灾抗灾能力差等问题,凸显建立与完善先进的安全监测与监控系统的必要性、紧迫性和现实性。其中井下移动目标的定位监控是煤炭行业多年来亟待解决的技术难题,研究和开发井下移动目标的定位与跟踪技术对于提高生产效率、保障井下人员的安全、完成灾后及时施救与自救都具有十分重要的意义。
目前我国井下人员无线定位系统主要为新型有源井下人员定位系统,它们大都采用射频识别(radio frequency identification,RFID)、Zigbee以及无线网络(wireless fidelity,WiFi)等技术实现无线检测、有线传输,实现一种2级集散式的监测系统对井下人员实现实时监测、自动跟踪定位,显示人员身份、位置及分布状况[1-4];但上述各系统实际上仅仅是一种考勤记录系统,而非真正意义上的人员定位跟踪系统,同时这些定位技术大多存在传输距离短、抗多径效应差、定位精度低等问题;因此难以实现复杂地质条件下的人员或设备的精确定位和跟踪。
超宽带(ultra wideband,UWB)技术具有传输速率高、发射功率低、不易被截获、多径分辨率高、抗干扰能力强等优势,且有十分精准的定位能力(理论上定位精度可达到cm级),这些优势使其在军事和民用领域都有十分宽广的研究前景[5]。在移动待测目标点定位、物品追踪、受灾现场搜救等方面,借助超宽带定位可使上述情况得到很好解决。
本文针对UWB技术对井下环境的高精度动态定位方法进行研究,通过对UWB各种定位方法进行比较,确定出一种适合于井下环境的定位方法;在此基础上采用扩展卡尔曼滤波对位置参数进行动态解算,并使用精度因子(dilution of precision,DOP)对基站几何分布进行评价,最终形成一套完整的井下移动目标高精度定位系统。
1 井下环境下UWB不同定位方法比较
UWB定位具有与其他技术类似的原理,主要通过测距或测向实现。按照其测量距离时利用的特征参数的不同,主要方法有信号强度(received signal strength,RSS)测量法、信号到达角度(angle of arrival,AOA)、信号到达时间(time of arrive,TOA)、信号到达时间差(time difference of arrive,TDOA)方法[6-7]。下面结合井下特殊环境对上述不同定位方法进行对比分析,确定出适合于井下环境的定位方法。
1)UWB使用RSS方法进行定位:一般来说,UWB的最大特点是带宽很大,而RSS定位方法不能充分利用带宽大的优势,所以对定位精度没有明显的改善;井下巷道壁明显粗糙并且存在大量障碍物,信号在传播过程中不可避免地遭受多路径衰减、小尺度衰落、路径损耗和阴影效应等影响,而UWB信道环境比较复杂,多径分量分布广,因此在这过程中不仅要考虑多径环境下能量收集和信道环境下衰弱模型,而且要考虑信道随时间的变化。因此UWB单独使用RSS方法无法达到很高的定位精度。
2)UWB使用AOA方法进行定位:基于AOA的定位方法实现上相对简单,但是它也有一定的弊端,例如在井下定位过程中,由于井下巷道分布错综复杂,信号主要为非视距传播(non line of sight,NLOS),在该情况下AOA方法将受到较大影响;并且使用该方法需要用到天线阵列或是增加参考站的数目,在一定程度上增加了系统的体积与成本;除此以外,由于UWB带宽很大,很容易受到周围物体多路径散射的影响,导致AOA估计精度较差。但是如果AOA与TOA、TDOA等定位方法进行混合,将AOA提供的信息作为辅助,在参考站较少的情况下能够显著提高定位精度。
3)UWB通过信号到达时间进行定位的方法:上面所述的基于TOA、TDOA的方法都能够实现对目标节点的定位;其中TOA方法是利用信号传播时间延迟进行测距,由于要求移动端与接收端时钟严格同步,所以存在一个同步误差,后者不要求移动端与接收端时钟严格同步,只需参考站间保持时间同步,这样系统相对简化,成本较小,但是由于信号是双向传播的,所以消耗功率较大。TDOA在实际中实现该技术的可能性与TOA相比要高得多,这是因为它不要求基站与待测目标之间时钟一致,只需要每个基站之间时钟同步就能得到所需值,并且在对到达时间做差的过程中会减小部分误差,定位精度能相对提高。
根据以上分析可知:在实际中每一种定位方法都不可能在各种复杂变化的信道环境下均达到理想的定位精度,相对来说TDOA在这些定位方式中具有较高的定位精度和较好的实用性,所以在本文中使用的定位方式是TDOA定位方法。
2 基于扩展Kalman滤波的UWB动态定位算法
卡尔曼(Kalman)滤波技术主要广泛应用在军事领域中的雷达定位与导航方面,这是由它理想的跟踪性能决定的;因此将Kalman滤波技术应用到无线定位技术中,能够有效达到动态跟踪定位的效果[8]。Kalman滤波算法适用于解决噪声为高斯噪声的线性问题;但由于实际中经常会遇到非线性问题,因此研究者对Kalman滤波算法进行改进,将Kalman滤波方法推广到非线性问题,提出解决非线性问题的扩展Kalman滤波算法。在本文中状态方程是线性的,但是观测方程是非线性的,矩阵形式的状态方程和观测方程分别为:
Xk=φXk-1+Wk-1;
(1)
Yk=h(Xk)+Vk。
(2)
对于TDOA二维定位,设用于定位的基站数是m,m≥3,可以得到m-1个TDOA数据,观测方程可进一步表示为

(3)

(4)


(5)
式中Hk的维数是m-1,由TDOA数据的数量决定。


(6)
Pk|k-1=ΦPk-1ΦT+Qk-1;
(7)

(8)

(9)

(10)
3 基站几何分布对定位精度影响
井下移动目标定位精度除了与UWB测距精度密切相关外,它还会受到定位基站的空间分布的影响;井下巷道的几何形状限制了定位基站在空间、平面上的布设形式:因此需要探讨定位基站的几何分布对定位精度的影响,为井下定位基站的部署提供理论支撑。文献[9]在总结前人研究成果的基础上,选取DOP值作为定位精度评价指标,从理论上分析了基站几何分布对DOP值和定位精度的影响,认为定位精度取决于定位基站的感知半径、巷道宽度和定位基站间距等因素。本文同样选用DOP值作为基站几何分布评价指标,采用实测的UWB测距数据分析基站几何分布对定位精度的影响。DOP值可根据上述的UWB动态定位算法中所计算出来的Pk|k和验后单位权中误差进行计算。利用实验对DOP值与平面定位精度之间的关系进行分析,实验结果见图1。

图1 DOP值与平面定位精度关系图
由图1可以发现:当DOP约为17的时候,在测距精度没有发生变化的前提下,定位精度迅速变差;因此可以认为将DOP值作为评价基站几何分布的标准是合理的,可以利用DOP值对基站的布设进行指导。
4 实验及结果分析

图2 UWB定位实验平台
为了对上述基于扩展Kalman滤波的UWB动态定位算法的性能进行分析,采用模拟井下定位实验进行验证。实验地点为辽宁工程技术大学博文楼回字形走廊,走廊宽度约为4m,高度约为3m。为了便于实验开展,搭建了UWB移动定位平台,平台包括1台UWB模块、笔记本电脑(含程序软件等)、实验小推车(方便设备移动及定位)以及电源,移动定位平台见图1,基于UWB的定位软件界面如图2~3所示。考虑到井下巷道的特殊几何形状,基准站应对称地布设于巷道两侧;并且在2对基准站(这些基准站位于同一平面)所构成的几何图形中心的顶部再安放一个基准站时,可以得到较好的DOP值[10]。由于受到实验条件限制,本文只能使用3台UWB模块作为基准站。将2台UWB基准站分别放置与走廊一端的两侧,另外1台UWB基准站放置于走廊另外一端的一侧,走廊长度约为15m。由于采用3台基准站只能进行平面定位,因此将上述3台基准站安置在同一个高度上,并且使移动定位平台的天线高度与3台基准站相同。在进行定位实验过程中,UWB移动定位平台只在由3台基准站所形成的三角形区域内进行测量,如果超出该范围,则采用上述布设原则对基准站重新进行布设。采用1台高精度全站仪用于确定各基准站坐标以及检核移动平台定位结果。模拟实验包括静态定位和动态定位2部分,选择不同视距(NLOS和LOS)条件进行实验,观察UWB的定位精度变化情况,并对结果进行统计分析。

图3 UWB定位软件参数设置
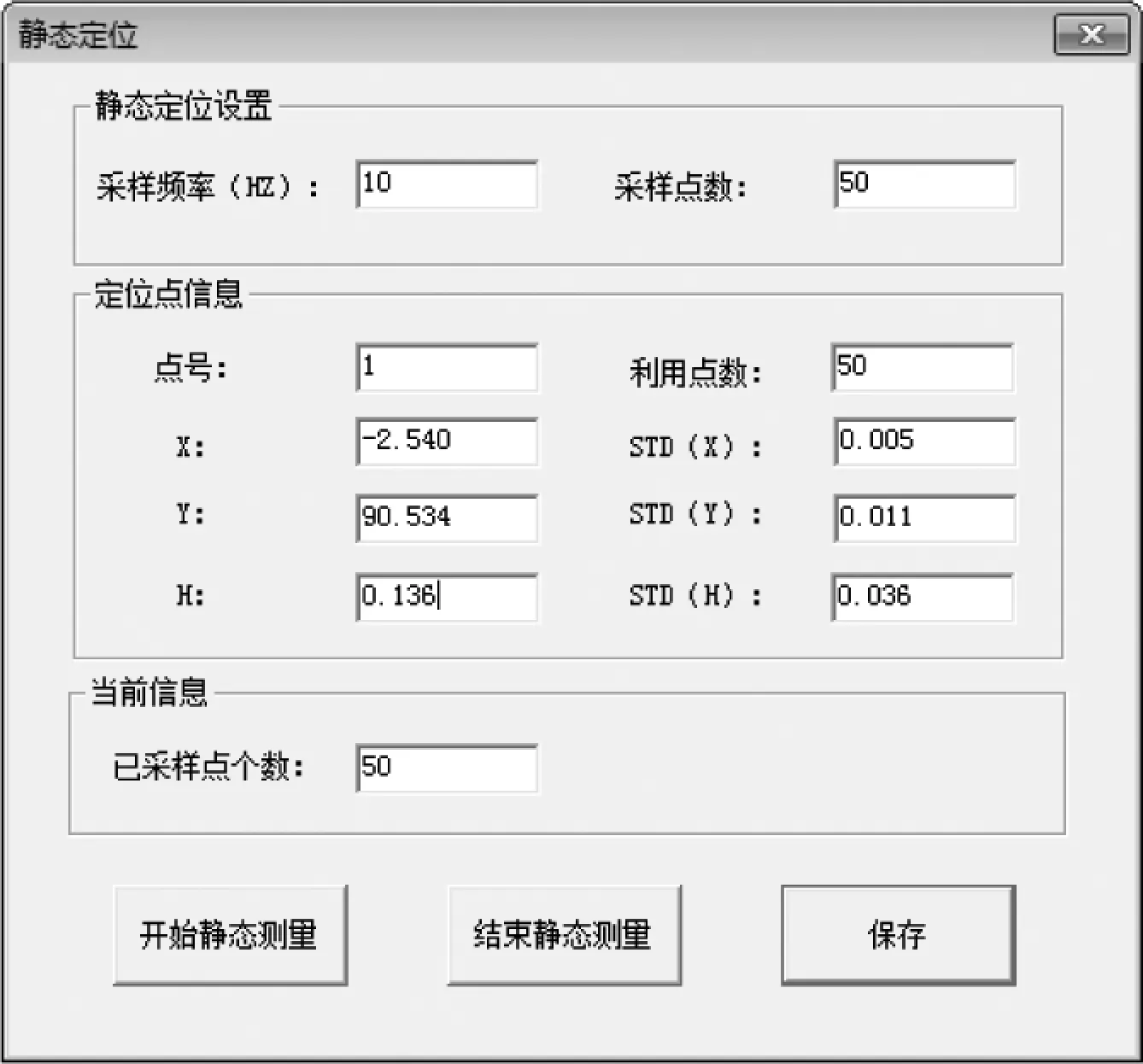
图4 UWB定位软件的静态定位
4.1静态定位精度测试
实验流程为:首先利用高精度全站仪设站,建立一个局部坐标系,测出基准站UWB(设备编号分别为100、110、111)的天线相位中心坐标,将坐标输入软件中(如图3所示);建立计算机与UWB模块的连接,启动移动定位平台。设置不同的通视条件,使用移动定位平台进行点位量测,同时利用全站仪测出该点处的准确坐标,将2者进行比较,确定定位精度(如图4所示)。统计结果见表1至表3。
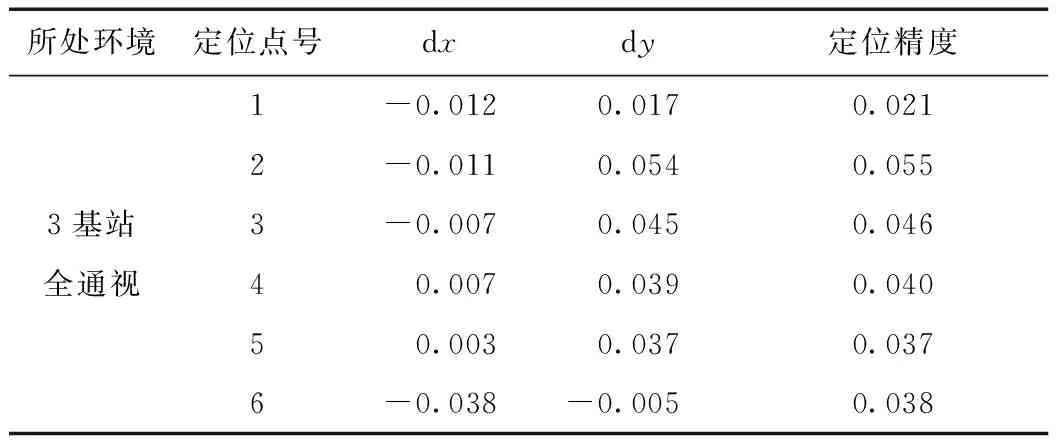
表1 通视情况下静态定位结果统计 m
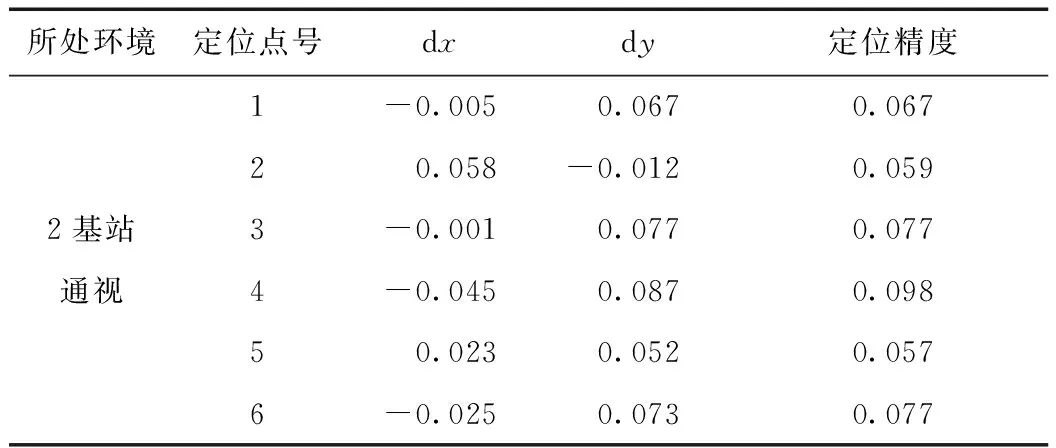
表2 2基站通视情况下静态定位结果统计 m

表3 1基站通视情况下静态定位结果统计 m
根据表1~3,可以得出:
1)在视距情况下,即通视环境下,平均定位精度可达4 cm。最大误差为5.5 cm,最小误差2.1 cm。
2)在非视距情况下,即有障碍物遮挡环境下(遮挡物为一面60 cm厚的钢筋混凝土墙),对定位精度影响较大,在2基站通视条件下,精度可达亚dm级,但在只有1基站通视条件下定位误差达10 cm以上。
4.2动态定位精度测试
实验流程为:使用UWB移动定位平台沿着走廊上标定的矩形路线进行动态测量,设定UWB模块采样间隔为0.1 s,平台移动的速度约为1 m/s,标定路线上的各拐点及UWB基准站坐标已预先采用全站仪测得。动态定位轨迹与标定路线对比图如图5所示(折线表示动态定位轨迹,直线表示设定路线)。为了测试本文提出的基于扩展Kalman滤波的UWB动态定位算法,将其定位结果与单历元解算结果进行对比,结果见表4。

图5 动态定位轨迹与标定路线对比图

参数估计方法定位误差/m定位成功率/(%)定位误差/(%)(≤10cm)单历元解算0.08578.247.2扩展卡尔曼滤波解算0.04092.579.7
通过表4我们可以发现扩展Kalman滤波算法可充分利用历史信息,其动态定位性能要优于单历元解算方法;因此使用扩展Kalman滤波算法可以实现良好的跟踪定位,具有较好的动态定位性能。
5 结束语
为有效提高井下移动目标的定位精度与可靠性,将UWB测距技术应用于井下移动目标定位系统中。通过对UWB不同定位方法进行比较,认为在井下环境下采用TDOA定位方法较为合理。井下巷道的几何形状限制了基站布设形式,引用DOP作为评价基站几何分布的指标;实验结果表明当DOP大于一定阈值后,定位精度会快速下降,因此可利用DOP值对基站的布设进行指导。使用搭建的UWB移动定位平台进行模拟井下环境定位测试,实验结果表明基于扩展Kalman滤波的UWB动态定位算法可使井下定位精度达亚dm级,优于当前其他井下无线定位系统精度。
[1]徐辉霞,包建军,谭达克,等.基于RFID的LANDMARC井下定位技术研究[J].工矿自动化,2014,40(5):18-21.
[2]陈彬.基于Zigbee技术的人员定位系统在煤矿井下中的应用与探索[J].煤矿现代化,2015(2):70-72.
[3]张鹤丹.基于WiFi技术的井下人员定位系统研究[D].西安;西安建筑科技大学,2013:27-34.
[4]陈奎.井下移动目标精确定位理论与技术的研究[D].徐州;中国矿业大学,2009:4-7.
[5]MAHFOUZ M R,ZHANG C M,MERKL B C,et al.Investigation of high-accuracy indoor 3-D positioning using UWB technology[J].IEEE Transactions on Microwave Theory and Techniques,2008,56(6):1316-1330.
[6]ALAVI B,PAHLAVAN K.Modeling of the TOA-based distance measurement error using UWB indoor radio measurements[J].IEEE Communications Letters,2006,10(4):275-277.
[7]CHEHRI A,FORTIER P,TARDIF P M.UWB-based sensor networks for localization in mining environments[J].Ad Hoc Networks,2009,7(5):987-1000.
[8]崔希璋,於宗俦,陶本藻,等.广义测量平差[M].2版.武汉;武汉大学出版社,2009:136-155.
[9]侯全武,王坚,胡洪,等.传感器位置对狭长空间定位精度的影响[J].大地测量与地球动力学,2013,33(1):117-122.
[10]LI B H,DEMPSTER A G,WANG J.3D DOPs for positioning applications using range measurements[J].Wireless Sensor Network,2011,3(10):334.
Dynamic positioning method based on TDOA in underground mines using UWB ranging
SUI Xin1,2,YANG Guangsong1,HAO Yushi1,WANG Changqiang1,XU Aigong1
(1.School of Geomatics,Liaoning Technical University,Fuxin,Liaoning 123000,China;2.Research Center of GNSS,Wuhan University,Wuhan,Hubei 430079,China)
In order to solve the problems of short transmission distance,poor ability of anti-multipath effect and low precision in the progress of accurate positioning and tracking in mine underground tunnel,a dynamic positioning method for this environment was proposed in the paper.The dilution of precision was used to evaluate the geometric distribution of the base station,and then a set of high precision positioning system for underground moving target was developed.Finally,a test on the positioning accuracy in a simulated underground environment with mobile positioning platform was carried out,and results showed that the positioning accuracy based on this platform could attain sub-decimeter level,which was better than that of other underground wireless positioning systems.
UWB; extended Kalman filter; underground tunnel; TDOA; DOP
2016-01-19
国家863计划资助项目(2014AA123101);国家自然科学基金资助项目(41501504);辽宁省教育厅创新团队项目(LT2015013);辽宁省教育厅科学研究一般项目(L2013141)。
隋心(1981—),男,辽宁沈阳人,讲师,研究方向为室内外高精度无缝定位。
简介:徐爱功(1963—),男,山东日照人,博士,教授,研究方向为全球卫星定位系统与地理信息系统及智能交通系统的集成与应用等。
P228
A
2095-4999(2016)03-0010-06
引文格式:隋心,杨广松,郝雨时,等.基于UWB TDOA测距的井下动态定位方法[J].导航定位学报,2016,4(3):10-14,34.(SUI Xin,YANG Guangsong,HAO Yushi,et al.Dynamic positioning method based on TDOA in underground mines using UWB ranging[J].Journal of Navigation and Positioning,2016,4(3):10-14 ,34.)DOI;10.16547/j.cnki.10-1096.20160303.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
导航定位学报(2021年4期)2021-08-29
好日子(下旬)(2020年6期)2020-08-04
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子制作(2019年9期)2019-05-30
电子制作(2018年16期)2018-09-26
劳动保护(2018年8期)2018-09-12
雷达学报(2017年1期)2017-05-17
火控雷达技术(2016年3期)2016-02-06
