BDS地基增强系统单双模定位性能比较
2016-09-19 01:23:23尹子明刘天恒张树为周润杨闫建巧
导航定位学报 2016年3期
尹子明,刘天恒,张树为,周润杨,闫建巧
(1.91431部队, 广东 湛江 524005;2.信息工程大学 导航与空天目标工程学院,河南 郑州 450001)
BDS地基增强系统单双模定位性能比较
尹子明1,2,刘天恒2,张树为2,周润杨2,闫建巧2
(1.91431部队, 广东湛江524005;2.信息工程大学 导航与空天目标工程学院,河南郑州450001)
为了进一步研究BDS地基增强系统,针对郑州BDS地基增强系统的服务时效性、实时静态定位精度、实时动态定位精度,在单GPS和BDS/GPS 2种模式下对定位测量精度、内符合精度、外符合精度和初始化时间进行了测试分析。测试结果表明,相比较GPS地基增强系统而言,利用BDS/GPS差分数据的流动站初始化时间明显缩短,定位精度也有一定程度的提高,实时精密定位水平精度达到2 cm,高程精度达到4 cm。
BDS;地基增强系统;网络RTK;定位精度
0 引言
北斗卫星导航系统(BeiDou navigation satellite system,BDS)能够为中国及其周边地区提供导航、定位、授时以及短报文通信服务。全球导航卫星系统 (global navigation satellite system,GNSS)在个人导航定位、航空航天、测绘等领域得到广泛应用;但目前卫星导航系统的完好性、可靠性、定位精度难以满足用户对导航系统日益增长的需求[1]。空基增强系统实时定位精度仅能达到m级至亚m级。连续运行卫星定位服务综合系统(continuously operating reference stations,CORS)实时定位精度可以达到cm级,但也存在一些问题:应用在国家高精度定位领域的安全隐患;服务行业有限,仅服务于测绘、城建、地震等专业行业。因此迫切需要建设拥有自主知识产权的BDS地基增强系统[2]。BDS地基增强系统(ground-based augmentation systems,GBAS)是利用地面增强站向用户发送差分定位数据来提高导航系统的导航定位精度,提高了系统的可靠性,并增强了系统的完好性监测[3]。
文献[4]对地基增强系统在飞机着陆中的应用做了仿真分析;文献[5]等测试了单全球定位系统(global positioning system,GPS)模式下的长江干线连续运行参考站系统精度、可用性等;文献[6]中研究了格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)对法国国家CORS网的影响;文献[7]也对GLONASS加入GPS CORS网是否提高了北美参考系精度进行了分析。
本文基于河南省地基增强实验系统对单GPS和BDS+GPS 2种模式下的系统性能进行了测试,并比较分析河南省BDS地基增强系统的定位性能。
1 地基增强系统
1.1系统简介
河南省BDS地基增强系统由参考站网(含移动参考站)、数据处理与控制中心、用户设备、网络通信系统组成。参考站网是系统基础,数据处理与控制中心是核心,用户设备是关键[8-9]。系统目标是建立覆盖全省的参考站网,系统能够同时接收BDS、GPS的卫星信号,能够为用户提供1~2 m、dm级的导航定位服务,以及cm级至mm级的精密定位服务。郑州BDS地基增强实验系统为河南省BDS地基增强系统的一期建设,包括由郑州站、登封站、巩义站、凤泉站、博爱站、开封站组成的参考站网,覆盖范围为郑州全市,系统实时定位精度在水平方向优于5 cm,高程方向优于10 cm。
BDS地基参考站网主要由GNSS连续运行参考站和移动参考站组成,重点负责提供GNSS高精度实时数据流、原始观测文件等导航应用的基础性、公共性、关键数据信息。其中移动参考站提供临时参考站的功能,是地基增强系统连续提供服务的一种必要备份手段,具有网点应急加密、空白区域填补、紧急情况下替代固定站的作用。移动参考站可以快速机动地布设于需要的位置,发挥应急机动的效能。
数据处理与控制中心作为系统应用的数据交换、信息共享、产品生成、标准管理的枢纽平台,是一个基于网络的导航综合服务平台。数据处理与控制中心形成3类主要产品和服务:①提供北斗信息、精密定位差分信息、导航地图数据等基础数据产品;②根据建设步骤及合作战略协议,汇集整理各行业各部门基于位置的信息,进行分类管理,并按照授权与协议,向指定用户开放共享;③研究和制定基于本系统的BDS卫星导航应用标准和规范,为应用服务规范提供参考,提高信息共享和互联互通能力。
用户设备主要指用户终端接收设备,它是一个非固定的系统,是可以扩展的系统,在数据处理与控制中心中加入相应的服务计算即可扩展出一种新的用户服务,用户可根据需求不同,定制不同的应用[10]。
网络通信系统主要分为3部分:一部分用于连接参考站到服务中心的有线传输;一部分用于连接数据处理与控制中心到用户的无线传输;另外部分用于连接分系统内部设备之间的数据通信。数据处理与控制中心通过有线宽带连接到互联网,具有一个公网静态互联网协议(internet protocol,IP)地址和域名,可以供实时用户和事后用户进行访问、获取服务和数据。
1.2误差分析
地基增强系统差分定位技术就是利用参考站的观测数据(包括卫星原始观测数据、气象数据)对参考站网覆盖范围内的、与时间空间相关的各项误差进行估计,然后移动用户再利用这些误差估计值与其原始观测值进行差分定位,从而提高测量精度、缩短测量时间[11]。地基增强系统差分定位获得固定解可靠性为95%~99%。地基增强系统差分定位对卫星星历、卫星钟差、电离层、对流层、固体潮、相对论效应等误差进行了有效的削弱;但同样也引入了一些新的误差,如参考站坐标误差、数据通讯误差、数据中心解算软件误差、流动站解算软件误差等[12]。
2 性能分析
2.1实时定位精度评估方法
实时定位精度测试可以分为定位测量精度评定、内符合精度评定和外符合精度评定。测量精度反映用户端使用差分数据后进行单次位置解算的精度,可以直接从实时相对定位 (real-time kinematic,RTK)设备的测量结果中获取;内符合精度可以反应出定位结果的收敛情况;外符合精度直接反映出系统实时定位的精度[13]。
1)内符合精度
(1)
2)外符合精度
(2)
将测点已知成果(2000国家大地坐标系)与各测点的RTK实时动态测量结果进行比较,按式(2)即可求出各测点系统外符合精度。在动态情况下,将事后动态基线解的结果代替观测点坐标的真值,按式(2)即可求出外符合精度。
2.2动态网络RTK定位精度
分别于2015-09-28和2015-10-09进行系统实时动态精度测试。在作业车上装载中海达H32接收机与南方银河1接收机,采样率设为5s,利用车载行驶作业获取固定解,车速为30~70km/h,根据测试结果统计分析导航定位精度。本次测试分为2组:第一组只接收GPS差分信息;第二组接收BDS+GPS差分信息,并对定位解算精度进行统计。在测试中还通过关闭登封站的数据服务对参考站网外的精度进行了测试。图1为动态网络RTK测试的行进路线在数据中心用户服务软件上的轨迹显示。

图1 动态测量轨迹图
经统计计算,动态测量中平面测量精度平均值,单GPS模式为0.021m,BDS+GPS模式为0.014m;高程测量精度均值,单GPS模式为0.030m,BDS+GPS模式为0.026m。利用GrafNav软件和原始观测数据计算移动站位置,再根据式(2)计算动态测量中平面外符合精度,单GPS模式为0.031m,BDS+GPS模式为0.025m;高程外符合精度:单GPS模式为0.033m,BDS+GPS模式为0.036m。在动态测量精度上,BDS+GPS模式比单GPS模式的平面精度略高,而高程精度大致相当。
在10月9日8∶00—13∶00动态网络RTK测试中,中海达H32的BDS+GPS模式测量精度及位置精度因子(positiondilutionofprecision,PDOP)变化如图 2和图 3所示。测试是在市区以及环城高速路上进行的,由于建筑物的遮挡,在1 500~2 500历元期间出现频繁失锁现象。从图 2和图 3可以看出,网络RTK测量时x、y、H方向上的精度与测量时的卫星分布,即PDOP,具有很高的相关性。
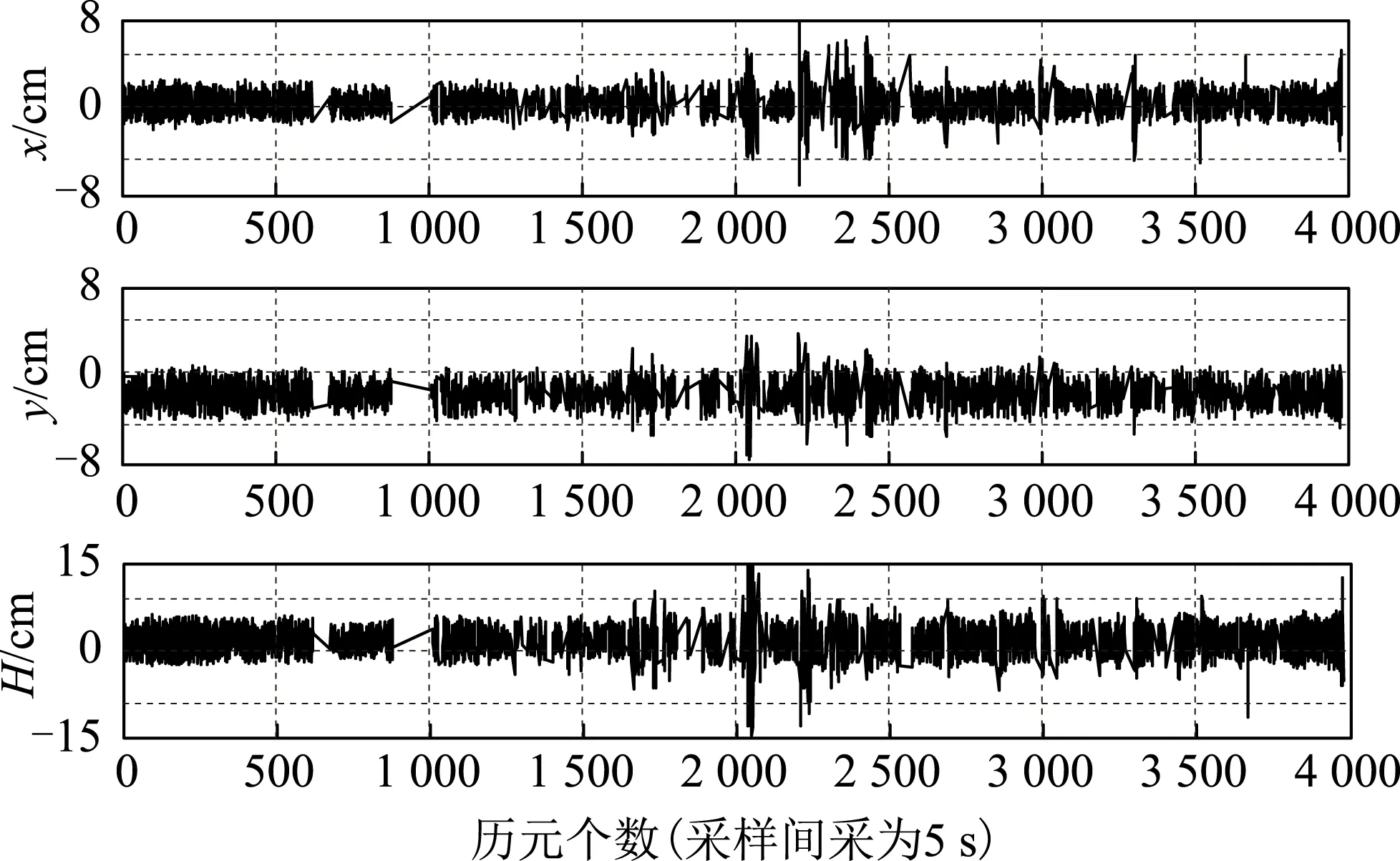
图2 动态测试测量精度变化图(BDS+GPS)
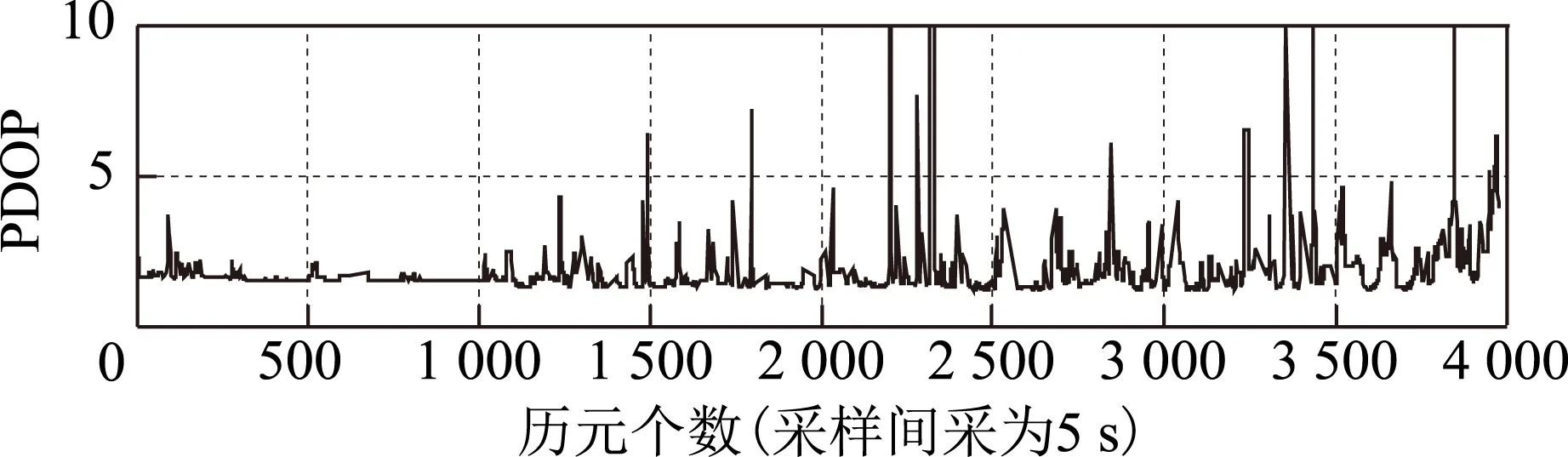
图3 动态测试PDOP变化图(BDS+GPS)
2.3静态网络RTK定位精度
2015-10-10 UTC 11∶00—17∶00,在郑州市GNSS基线场中选取2个点分别安放网络RTK H32设备和南方银河1设备,采样率设为5 s,采用单GPS模式和BDS+GPS模式进行观测。
经统计计算,静态测量中平面测量精度平均值:单GPS模式为0.020 m,BDS+GPS模式为0.016 m;高程测量精度均值:单GPS模式为0.025 m,BDS+GPS模式为0.028 m。与动态测量精度相比,静态测量精度无明显变化,BDS+GPS模式仍优于单GPS模式。
通过式(1)和式(2)计算,静态测量中平面内符合测量精度,单GPS模式为0.013 m,BDS+GPS模式为0.008 m;高程内符合精度,单GPS模式为0.017 m,BDS+GPS模式为0.011 m;静态测量中平面外符合精度,单GPS模式为0.023 m,BDS+GPS模式为0.016 m;高程外符合精度,单GPS模式为0.018 m,BDS+GPS模式为0.028 m。无论是单GPS模式还是BDS+GPS模式,静态外符合精度明显优于动态外符合精度。
图 4和图 5为中海达H32的GPS+BDS模式静态测量结果与真值之差以及PDOP的分布情况。
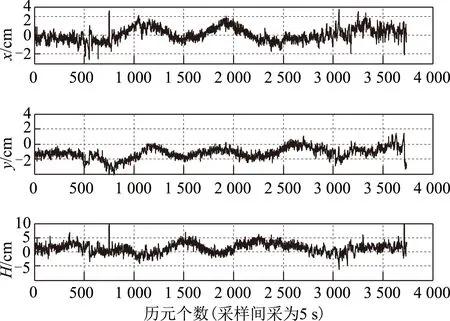
图4 静态测量与真值偏差变化(BDS+GPS)
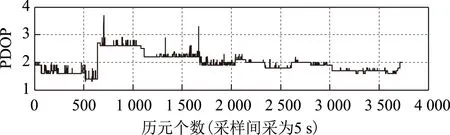
图5 静态测量PDOP变化图(BDS+GPS)
从图中可以看出:整个测试过程卫星可见性良好,未出现严重的失锁现象;水平方向(x、y方向)相对真值的偏差变化趋势具有一致性;y方向和H方向存在较为明显的系统性偏差。
2种型号测试设备测试内外符合精度如表 1所示。从测试结果中可以看出,无论是在静态测量外符合精度还是在内符合精度上,BDS+GPS模式比单GPS模式的平面精度略高,而高程精度大致相当。
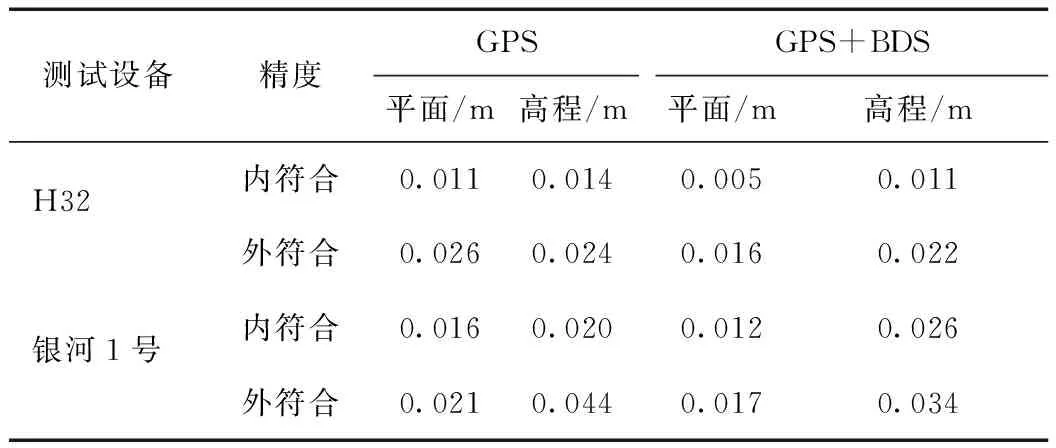
表1 定位精度统计表
2.4时效性
选取河南省郑州市GNSS基线场中若干个点作为测试点,分别安放网络RTK H32设备和南方银河1设备。每个网络RTK设备分别选取GPS和GPS+BDS模式,每种模式初始化10次,并记录初始化时间。每个型号的设备都使用2台进行测试。从表2中可以看出:GPS+BDS模式比GPS模式初始化速度快,固定时间约缩短5 s,说明测区范围内增加使用BDS差分信息、增加共用卫星数量可使接收机初始化速度明显加快。
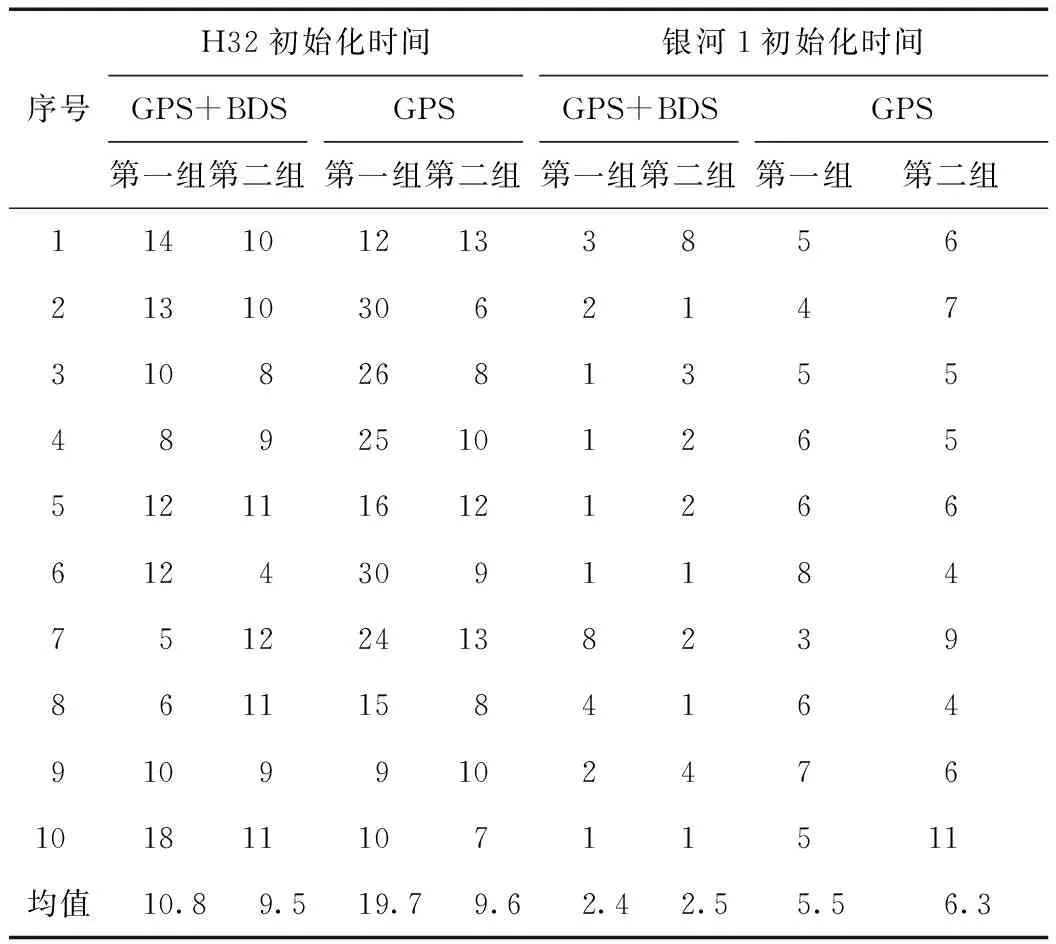
表2 初始化时间 s
3 结束语
郑州地基增强系统建立了覆盖郑州市的兼容BDS与GPS的参考站,能够为河南省范围内的用户提供1~2 m、dm级的导航定位服务以及cm级至mm级的精密定位服务。在定位精度方面,该系统采用多卫星导航系统虚拟参考站(virtual reference station,VRS) 技术实时精密定位水平精度达到2 cm,高程精度达到4 cm,精度指标满足设计要求。通过测试结果可以看出BDS+GPS的服务模式可以更加有效地利用卫星资源,使卫星星座构成最佳的几何结构,从而满足提高导航定位精度的需要。在全省范围的地基增强系统完成后,还应对系统的服务范围、系统服务的稳定性等内容进行测试。
[1]李斌,冯泽,原彬.基于COMPASS的地基增强系统可用性分析[J].现代导航,2012(6):391-395.
[2]李作虎,杨强文,吴海玲,等.北斗地基增强系统建设与产业化发展[J].高科技与产业化,2014(10):59-65.
[3]刘恺,周萌,翁祖泉.北斗地基增强系统建设中的问题和建议[J].数字通信世界,2015(8):29-31.
[4]李康,巩冠峰.GPS地基增强系统简介及其性能仿真验证[J].电光与控制,2013,20(8):89-94.
[5]王锴华,杨海龙.内河航运CORS系统动态测试新方法[J].水运工程,2014(11):19-23.
[6]BRUYNINX C.Comparing GPS-only with GPS + GLONASS positioning in a regional permanent GNSS network[J].GPS Solutions,2007,11(2):97-106.
[7]NARDO A,HUISMAN L,TEUNISSEN P J G.GPS+GLONASS CORS processing:the Asian-Pacific APREF case[M].Berlin:Springer Berlin Heidelberg,2014:239-246.
[8]林国利,张文言,於永东,等.上海北斗连续运行参考站系统(SHBD-CORS)的建设与精度测试[J].测绘通报,2013(11):136-137.
[9]闫学东.银川市YCCORS系统建设与应用[J].测绘技术装备,2013(4):67-70.
[10]陈锡春,谭志强,李锋.北斗用户终端测试系统的设计与实现[J].无线电工程,2015,45(1):40-43.
[11]李健.卫星定位连续运行参考站网的系统架构及软件体系设计[D].郑州:信息工程大学,2007:1-96.
[12]刘紫平.成都理工大学CORS系统的建设与精度测试[D].成都:成都理工大学,2011:1-74.
[13]王智超.单基站CORS-RTK精度测试与分析[D].大连:大连理工大学,2013:1-62.
[14]袁宏超,秘金钟,高猛,等.双导航定位系统伪距单点定位方法与精度分析[J].导航定位学报,2014,2(3):38-43.
Comparison of positioning performance of BDS ground-based augmentation system in different modes
YIN Ziming1,2,LIU Tianheng2,ZHANG Shuwei2,ZHOU Runyang2,YAN Jianqiao2
(1.Troops 524005,Zhanjiang,Guangdong 524005,China;2.College of Navigation and Aerospace Engineering,Information Engineering University,Zhengzhou,Henan 450001,China)
In order to further study on BDS GBAS,the location performance of BDS GBAS in Zhengzhou city,such as service timeliness,real-time static positioning accuracy and real-time dynamic positioning accuracy,was tested in the paper.The tests included positioning accuracy,inner accord precision,external accord accuracy and initialization time in the single GPS and BDS/GPS modes.Result showed that compared with GPS GBAS,the rover initialization time with differential data of BDS/GPS could be shortened and the positioning accuracy could be improved as the horizontal accuracy of 2 cm,and the altitude accuracy of 4 cm in the real-time high precision positioning.
BDS;GBAS;network RTK;positioning precision
2015-11-30
装备预研基金项目(9140A24011314JB52001)。
尹子明(1990—),男,河北定州人,硕士研究生,研究方向为基于地基增强系统的BDS数据质量分析。
10.16547/j.cnki.10-1096.20160314.
P228
A
2095-4999(2016)03-0064-05
引文格式:尹子明,刘天恒,张树为,等.BDS地基增强系统单双模定位性能比较[J].导航定位学报,2016,4(3):64-68.(YIN Ziming,LIU Tianheng,ZHANG Shuwei,et al.Comparison of positioning performance of BDS ground-based augmentation system in dfferent modes[J].Journal of Navigation and Positioning,2016,4(3):64-68.)
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
军民两用技术与产品(2021年10期)2021-11-25 14:17:57
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
科学家(2019年3期)2019-08-18 09:47:43
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
科学与财富(2016年28期)2016-10-14 22:02:34
信息安全研究(2015年3期)2015-02-28 20:17:57
太空探索(2014年1期)2014-07-10 13:41:50
四川生理科学杂志(2014年2期)2014-02-28 14:09:20