
复杂背景下海天线的连通域检测法
2016-09-18 10:09:47汪劲希燕肇一彭真明电子科技大学光电信息学院四川成都610054
舰船科学技术 2016年8期
汪劲希,燕肇一,彭真明( 电子科技大学 光电信息学院,四川 成都 610054)
复杂背景下海天线的连通域检测法
汪劲希,燕肇一,彭真明
( 电子科技大学 光电信息学院,四川 成都 610054)
海天线的检测对于划分海空背景、识别红外舰船目标具有重要作用。本文提出一种基于线段表连通域原理的海天线检测方法。首先去除原始红外图像的强水纹干扰和背景干扰,再通过梯度运算和最大值滤波找出海天线的位置。最后基于线段表连通域原理对二值化后的图像进行检测,以提取海天线的非线性边缘信息。实验表明,该方法的检测精度高,而且当海天线上存在舰船时,不会对舰船轮廓产生影响,克服了 Hough 变换法只能检测出直线的缺点,具有较强的实用性。
海天线检测;红外舰船目标;梯度运算;连通域检测;线段表
0 引 言
红外舰船目标识别技术由于在无人侦察和反舰制导中的重要作用,近年来被许多国家列为军事重点研究课题。但受到海面强水纹、背景障碍物、探测器噪声等因素的干扰,舰船目标的定位和识别成为非常具有挑战性的问题。海天线的检测可以有效抑制复杂海空背景中的噪声干扰、缩小舰船目标的搜寻范围,因此也成为红外舰船识别中的关键环节。
许多现有文献对海天线的检测方法进行研究。魏颖[1]等利用小波多尺度分析边缘检测算法,建立直线方程并求得不同尺度下海天线的位置;刘松涛[2]等提出一种鲁棒的海天线检测算法,先进行梯度运算得到差分图像,然后方向细化并采用 Hough 变换检测海天线;刘士建[3]等通过模版运算增强图像在海天线区域的梯度值,利用非线性阈值分割去除图像噪声,并通过行扫描提取出海天线位置;安博文等[4]采用随机点采样配合多线段拟合的方法高效检测海天线,克服Hough 变换计算量大影响实时性的缺点,提高检测效率。可以发现,大多数现有文献的核心思想在于直线提取。当图像背景中含有山、桥等复杂物体,海天线上含有舰船目标时,利用直线代替海天线位置就会对海天线上的舰船造成影响。本文基于线段表连通域原理对海天线进行检测,利用连通水平线段构成的曲线来刻画海天线,不会对海天线上的舰船轮廓产生影响,具有较强的实用性。
1 图像预处理
为更好地提取海天线信息,需要对原始红外图像进行预处理,以去除强水纹干扰和背景中复杂物体的影响,具体操作分为 3 步。
1.1去除强水纹干扰和背景干扰
强水纹干扰会造成红外图像中波浪的灰度强度接近海天线像素点灰度值,造成海天线提取困难。刘世军[5]在研究中发现,强水纹干扰的水面区域像素灰度值一般在均值附近,因此采用如下方法去除干扰:

当背景中含有山脉、桥梁时也会对海天线的检测造成干扰。例如桥面也是直线,在经过边缘检测后容易与海天线边缘混淆,因此采用去水纹后的图像与原图像之差作为研究对象进行下一步的边缘检测,这种方式也能较为容易的去掉复杂背景的干扰。

1.2边缘检测
在去除背景干扰后,图像成分变得较为简单。这时为了达到寻找边缘的目的,检测灰度变化可以采用一阶/二阶导数来完成[6]。为了在图像中寻找边缘的强度和方向,选择梯度向量来定义:
该向量的重要几何性质就是它指明了函数在某位置最大变化率的方向。

式中:gx和 gy都是与原图像大小相同的图像,是 x 和 y 在 f 中所有像素位置上变化产生的,而即可提取图像的边缘信息。
1.3最大值滤波与二值化处理
最大值滤波是一种基于统计排序理论的非线性滤波技术[7],其定义为:

式中:A 为滤波窗口,通常取为奇数,最大值滤波的目的在于消除噪声的同时保持图像中的边缘和细节。
为了使图像变得更加简单且减少数据量,再对图像进行二值化处理。由于预处理中已去除了水纹干扰和复杂背景干扰,该方法直接对滤波后的图像 K 做如下处理:

直接将矩阵中的非 0 值转化为 1 的做法简化了传统二值化处理中确定阈值的步骤。
2 连通域检测
二值图像的连通域检测是图像处理中提取目标几何特征的常用方法。如图 1 所示,连通区域分为四连通和八连通 2 种,对于具有复杂背景干扰的海天线检测,选择八连通的方式较为合适。
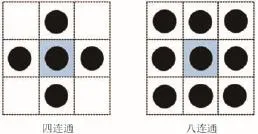
图 1 两种连通关系Fig. 1 Two kinds of correcting relation
当 2 条线段相连通时,线段上的像素点也都连通,因此连通域可以看作水平线段的组合。本文采用基于线段表的二值图像连通域检测法[8],可以减小图像存储空间、高效判断出海天线的位置。将水平线段作为连通体的基本单元,具体检测步骤如下:
1)对二值图像逐行扫描,记录所有水平线段的编号和左右端点坐标 x1,x2,并将每条线段的标记值赋为 0。
2)根据端点坐标判断两相邻水平线段间的连通关系。设 xa和 xb为第 i - 1 行某线段的左右端点坐标,xc和 xd为第 i 行某线段的左右端点坐标,若能够满足条件,则判定两相邻水平线段八连通。
3)更新线段标记,具体处理方法为:
① 如果当前线段与上一行中的线段都不连通,则按照自然数从小到大的顺序赋予当前线段新的标记。由于二值图像中处于第一行的线段没有上一行,直接将其标记为 1。
② 如果当前线段与上一行某线段相连通,且当前线段标记值为 0,则将上一行线段的标记值赋予当前线段。
③ 如果当前线段与上一行某线段相连通,且当前线段的标记值非 0,则将两线段中较小的标记值赋予当前线段。
4)标记更新之后,还可能出现相同连通区域内包含不同标记值的情况,如图 2 和 图 3 所示,因此需要建立映射表,进行标记统一。首先初始化一个二维数组,记录每条线段的编号与其对应的标记值(见表 1)。再采用递归的传递方法,按线段编号从大到小的顺序依次归并等价的连通标记。(见表 2)。
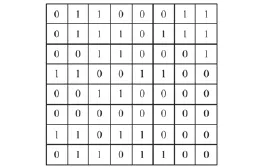
图 2 原始二值图像Fig. 2 The original binary image

图 3 标记后二值图像Fig. 3 The binary image after being marked

表 1 扫描后的映射表Tab. 1 The mapping table after scanning

表 2 排序归并后的映射表Tab. 2 The mapping table after merging sorting
依次执行以上的连通域检测步骤后,可以发现该二值图像的八连通区域有标记为 1,2,4 的 3 个,连通域检测结果如图 4 所示。
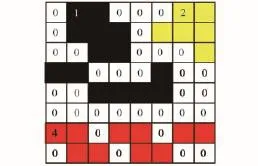
图 4 连通域检测结果Fig. 4 The result of connected area detection
3 实验结果与分析
以一幅具有强水纹干扰和复杂背景的红外图像检测算法效果。首先去除图像的强水纹干扰和复杂背景干扰,再依次对图像进行梯度运算、最大值滤波、二次梯度运算以及二值化后的最长连通域检测,原始红外图像中的海天线位置即可提取出来。图 6~图 12 展示了各流程的处理效果。

图 5 源图像Fig. 5 Source image

图 6 去除强水纹后图像Fig. 6 Removing the disturbance of water
为了比较 Hough 变换海天线检测法与连通域检测的效果差异,再分别对复杂程度依次增加的 3 幅红外图像作检测,结果如图 13~图 18 所示。
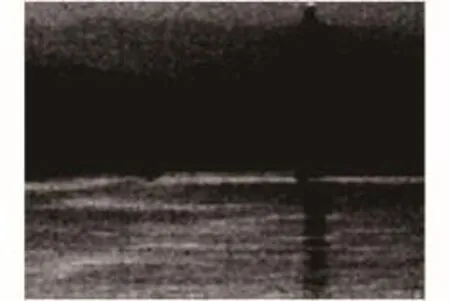
图 7 去除复杂背景后图像Fig. 7 Removing the complicated background

图 8 梯度运算结果Fig. 8 The gradient computation

图 9 最大值滤波结果Fig. 9 Maximum filtering
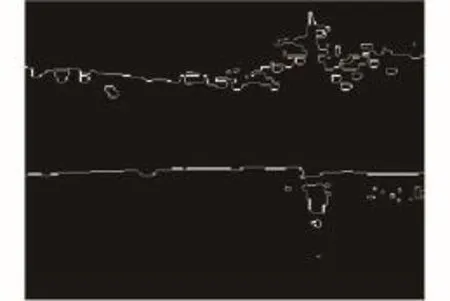
图 10 二次梯度运算结果Fig. 10 The 2nd gradient computation
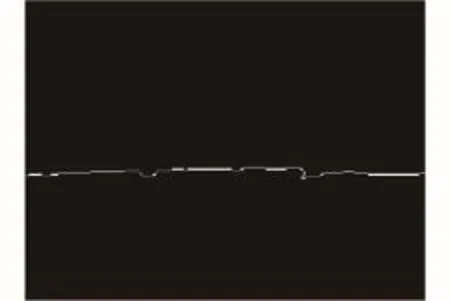
图 11 最长连通域检测结果Fig. 11 The longest connected area detection
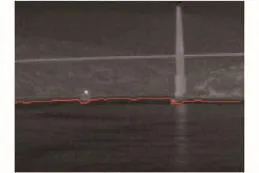
图 12 海天线情况Fig. 12 The sea-sky-line detection

图 13 Hough 变换检测图 AFig. 13 Hough transform detection figure A

图 14 Hough 变换检测图 BFig. 14 Hough transform detection figure
对于图像 A,可以看出 Hough 变换与连通域检测的结果差别不大;对于图像 B,Hough 变换的海天线直接穿过舰船,而连通域检测的海天线则绕过线上舰船,也反映出海平面的起伏变化;对于图像 C,Hough变换的海天线检测出现了偏差,误把桥面当做了海天线,而基于连通域原理检测出的海天线较为准确。

图 15 Hough 变换检测图 CFig. 15 Hough transform detection figure C

图 16 连通域检测图 AFig. 16 Connected area detection figure A

图 17 连通域检测图 BFig. 17 Connected area detection figure B

图 18 连通域检测图 CFig. 18 Connected area detection figure C
4 结 语
海天线检测对于抑制背景干扰、提高舰船检测精度和检测速度有重要意义。本文利用基于线段表的连通域原理检测出的海天线,不仅消除了复杂背景的干扰,而且避开了海平面上的舰船,使得海天分割更加准确,也为进一步应用(诸如舰船目标识别、图像配准)奠定了良好基础。
[1]魏颖,史泽林,李成军,等. 海空背景下红外小目标检测算法[J]. 红外与激光工程,2003,33(2):153-156. WEI Ying,SHI Ze-lin,LI Cheng-jun,et al. Detection algorithm for infrared small target in background of sea and sky[J]. Infrared and Laser Engineering,2003,33(2):153-156.
[2]刘松涛,周晓东,王成刚. 复杂海空背景下鲁棒的海天线检测算法研究[J]. 光电工程,2006,33(8):5-10. LIU Song-tao,ZHOU Xiao-dong,WANG Cheng-gang. Robust sea-sky-line detection algorithm under complicated sea-sky background[J]. Opto-electronic Engineering,2006,33(8):5-10.
[3]刘士建,蒋敏,庄良. 一种快速有效的红外图像中海天线提取算法[J]. 红外技术,2011,33(4):230-232,240. LIU Shi-jian,JIANG Min,ZHUANG Liang. A fast and effective algorithm for sea-sky-line extraction in infrared images[J]. Infrared Technology,2011,33(4):230-232,240.
[4]安博文,胡春暖,刘杰,等. 基于Hough变换的海天线检测算法研究[J]. 红外技术,2015,37(3):196-199. AN Bo-wen,HU Chun-nuan,LIU Jie,et al. Study of sea-skyline detection algorithm based on Hough transform[J]. Infrared Technology,2015,37(3):196-199.
[5]刘世军. 海空背景下红外舰船目标识别方法研究[D]. 成都:电子科技大学,2011. LIU Shi-jun. The study of the infrared ship recognition method under sea-sky background[D]. Chengdu:University of Electronic Science and Technology of China,2011.
[6]冈萨雷斯,伍兹. 数字图像处理[M]. 阮秋琦,译. 3版. 北京:电子工业出版社,2011:454-455. GONZALEZ R C,WOODS R E. Digital image processing [M]. YUAN Qiu-qi,Trans. 3rd ed. Beijing:Publishing House of Electronics Industry,2011:454-455.
[7]彭真明,雍杨,杨先明. 光电图像处理及应用[M]. 成都:电子科技大学出版社,2012:106-108. PENG Zhen-ming,YONG Yang,YANG Xian-ming. Photoelectric image processing and application[M]. Chengdu:UESTC Press,2012:106-108.
[8]梁炜,朱煜. 基于线段表的二值图像连通区域检测[C]//计算机技术与应用发展·2007——全国第18届计算机技术与应用(CACIS)学术会议论文集. 宁波:中国仪器仪表学会微型计算机应用学会,2007:1157-1160. LIANG Wei,ZHU Yu. Connected area detection of binary image based on line segment table[C]//The Computer Technology and Application Development. Ningbo:[s.n.],2007:1157-1160.
A sea-sky-line detection algorithm based on the method of connected area detection under complicated background
WANG Jin-xi,YAN Zhao-yi,PENG Zhen-ming
(School of Optoelectronic Information,University of Electronic Science and Technology of China,Chengdu 610054,China)
The detection of sea-sky-line is of great importance in dividing the sea-sky background and recognizing infrared ship targets. This article provides a sea-sky-line detection algorithm which uses the method of connected area detection base on line segment table. Firstly,wipe off the disturbance of water wave and background,then do the gradient algorithm and max filtering to find the position of sea-sky-line. By means of connected area detection based on the segment table,the non-linear information of the sea-sky line can be obtained after binaryzation. It concludes that our method has a high detecting precision and it will not affect the ships' outline. It overcomes the disadvantage in Hough transform which can only detect straight line and has a strong practicality.
sea-sky-line detection;infrared ship targets;gradient algorithm;Connected Area Detection;line segment table
TP391.41
A
1672 - 7619(2016)08 - 0108 - 05
10.3404/j.issn.1672 - 7619.2016.08.023
2016 - 06 - 15
国家自然科学基金资助项目(61571096)
汪劲希(1995 - ),男,本科,研究方向为光电图像处理。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
苏州工艺美术职业技术学院学报(2021年4期)2022-01-10 12:28:48
小学生学习指导(高年级)(2021年5期)2021-05-18 07:34:42
舰船科学技术(2021年12期)2021-03-29 01:28:44
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:42
小学生学习指导(低年级)(2019年4期)2019-04-22 03:28:40
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:38
新作文·高中版(2017年12期)2018-01-04 18:55:20
计算机与数字工程(2016年8期)2016-09-10 08:23:45
舰船科学技术(2016年1期)2016-02-27 15:39:26
