伴随空化现象的细长体倾斜穿透水体过程研究
2016-09-15 05:49施红辉周杨洁彭立兵朱棒棒贾会霞
浙江理工大学学报(自然科学版) 2016年5期
施红辉,周杨洁,彭立兵,朱棒棒,陈 波,贾会霞
(浙江理工大学机械与自动控制学院,杭州 310018)
伴随空化现象的细长体倾斜穿透水体过程研究
施红辉,周杨洁,彭立兵,朱棒棒,陈波,贾会霞
(浙江理工大学机械与自动控制学院,杭州 310018)
在自制的水下高速细长体发射装置上,进行了带攻角的细长体穿透水体的实验。利用高速摄影仪拍摄了细长体周围产生的空泡流以及细长体对自由液面的扰动,并且利用CFD数值模拟软件,模拟了细长体倾斜出水时与自由液面的相互作用。研究结果表明:当细长体以足够高的速度(37m/s)在水中航行时,会诱导产生超空泡;细长体在倾斜出水前后,速度会发生突增; 细长体的平钝的尾部对自由液面隆起程度影响较大,尖锐头部对自由液面隆起程度影响较小。模拟结果与实验结果较为一致。
细长体;高速摄影;倾斜穿透;超空泡;数值模拟
0 引 言
当水流高速绕流过一物体时,物体表面附近的液体压力会降低,当压力降低到水蒸气压力时,液体便由液相变为汽相,形成空化现象。空泡会影响水下航行体的速度,还会引起振动和金属空蚀等负面影响。但是,后来的研究发现空化现象也可以被用来有效地减小航行体的水下阻力,其关键技术就是在航行体表面形成一种可更新的包裹性气体,使航行体表面的浸湿面积减少,从而有效降低黏性阻力[1]。罗格维诺维奇[2]早在上世纪60年代便通过理论和实验研究,提出了经典的空泡截面独立膨胀原理;Savchenko等[3]对高速的非定常超空泡流进行了实验研究,分析了不同空化器类型对超空泡发展演变的影响;Liju等[4]利用高速摄影技术对轴对称航行体出水过程中的水面浪涌效应进行了研究,并用边界元法进行了计算。国内近几年在理论和技术上对超空泡开展了大量的研究,如:顾建农等[5]在水洞中对典型头型的轴对称航行体进行了实验研究,分析了空化数对轴对称体空泡的影响;熊天红等[6]利用大涡模拟方法(large eddy simulation,LES),对三维带尾翼射弹超空泡流进行了数值模拟计算,分析了超空泡对水下射弹减阻的影响;施红辉等[7]利用高速摄影技术,观察到高速入水的细长体诱导生成的超空泡,并对超空泡的产生、发展以及溃灭的过程进行了分析研究;李凤臣等[8]对减阻剂水溶液内的超空泡进行了实验研究,得到了减阻剂水溶液有利于超空泡产生的结论。然而,有关航行体以及其表面超空泡与自由液面相互作用的机理到目前为止还不清楚,需要进一步研究。
本文在自行研制的水下高速细长体发射装置上,进行了带攻角的细长体穿透水体过程的实验研究。在此基础上,利用CFD数值模拟软件进行了数值模拟,并对模拟结果进行了研究分析。
1 实验装置与方法
图1为自行设计研制的水下高速细长体发射实验装置,主要由实验水箱、水箱支架、空气压缩机、射钉枪、高速摄影仪和工况计算机等组成。

1.实验水箱;2.水箱支架;3.观察窗;4.水箱底部开关;5.射钉枪;6.空气压缩机;7.细长体;8.照明灯;9.高速摄影仪;10.工况计算机图1 实验系统示意
实验采用高压气体将细长体(射钉)射入二维水箱的方法[9]来研究细长体倾斜出水问题。本文侧重讨论研究带攻角的细长体的出水情况,具体实验方法可参见文献[10],细长体的出水攻角通过调整射钉枪的发射角度来控制。出水攻角的定义是:细长体的运动轨迹线按顺时针方向与水平面之间的夹角。实验所用细长体模型(射钉)如图2所示,射钉的材质为铁,钉体的直径为1 mm,射钉的顶端呈针尖状,射钉的底端是边长为2 mm的正方形。

图2 实验所用细长体模型
利用视频处理软件对拍摄的视频进行分帧处理,对分帧后的照片进行裁剪拼接,得到了细长体完整出水过程的照片。测量细长体位移的方法如图3所示,为减小测量误差,采用两个基准面,分别是自由液面和照片的底边。细长体速度的求解方法见式(1)—(3):
(1)
(2)
(3)

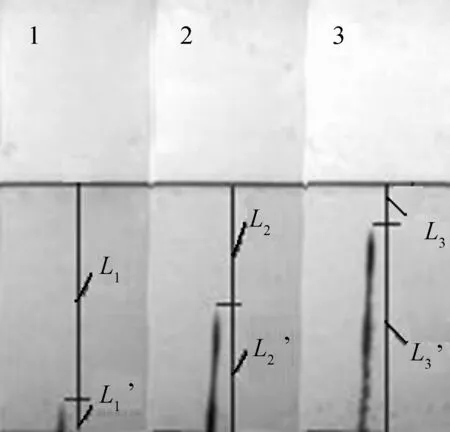
图3 细长体位移测量
本实验中水温为26 ℃,环境温度为30 ℃,实验工况如表1所示。因篇幅所限,本文只给出20mm和30mm钉体的实验结果。

表1 实验工况
2 实验结果及分析
图4是20 mm长度细长体以95.5 °攻角出水的照片,图中相邻两张照片的时间间隔为1 ms。从图4中可以看出,20 mm长度细长体壁面上并没有产生明显的超空泡,只是在细长体头部与尾部产生了两个局部空泡。根据自然超空泡理论,当空化数σ小于0.1时,航行体表面才会产生超空泡[12],测量得图4(1)中细长体的初始速度约为17 m/s,相对应的初始空化数σ约为0.56,所以细长体表面并没有产生超空泡。图4(2)-(4)中,细长体在水下以95.5 °攻角逐步靠近自由液面。图4(5)-(9)中,细长体头部穿透自由液面,液面隆起较为明显,细长体两侧对自由液面的影响是不对称的,迎风面隆起得较为陡立,范围较小,背风面隆起得较为平缓,范围较大,这是液体的粘性,表面张力以及细长体头部对自由液面的挤压共同造成的。图4(10)-(12)中,细长体尾部穿透自由液面,自由液面的“喷溅”现象不是很明显,这是因为细长体的速度较小,对自由液面的挤压与撞击作用不大,带出来的液体的惯性不大造成的[13]。实验表明,随着细长体出水速度的增大,细长体对自由液面的撞击挤压作用增大,自由液面的隆起就会增大,“喷溅”的现象也会更加明显。 图4(13)-(15)中,随着细长体离开自由液面,细长体底端粘连着一条水带。图4(16)-(22)中,自由液面上喷溅的水柱高度持续增加。

图4 20 mm长度细长体出水照片(相邻照片间时间间隔为1 ms)
图5是30 mm长度细长体以99.6 °攻角出水的照片,图中相邻两张照片的时间间隔为1 ms。测量得图5(1)中细长体的初始速度为37 m/s,从图5(1)-(2)中可以看出,30 mm长度细长体头部被左右对称的超空泡包裹着。图5(3)中,包裹细长体头部的空泡开始溃灭,细长体尾部产生了左右对称的椭圆形尾空泡。图5(4)-(5)中,细长体尖锐头部穿透自由液面,暴露到空气中。图5(6)-(7)中,细长体出水时,细长体背风面拖出一条弧形的水膜。水膜来源于细长体表面的空泡,随着时间的推移,水膜逐渐变长。图5(8)中,水膜消失,这是由于细长体速度较大,空气阻力使得粘在细长体表面的水分剥落。图5(9)-(11)中,细长体尾部完全脱离自由液面,自由液面出现了较为激烈的“喷溅”现象。图5(12)-(13)中,细长体出水后在水流场中的尾迹呈现出不对称的涡街分布,随着时间的推移,涡街开始扩散消亡。
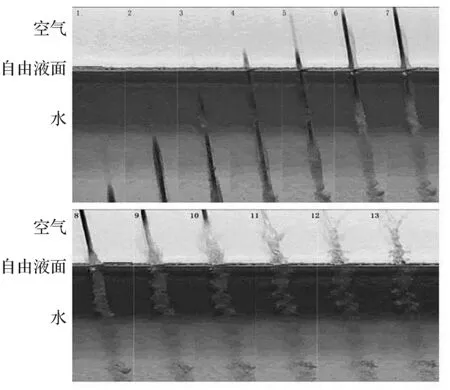
图5 30 mm长度细长体出水照片(相邻照片间时间间隔为1 ms)
20 mm长度和30 mm长度细长体倾斜出水的速度时间变化曲线如图6所示,其中坐标横轴为细长体航行的时间,0时刻为细长体尾部完全离开自由液面的时刻,坐标纵轴为细长体航行的速度。两个钉体的速度的差异,与射钉钉帽与射钉枪的吻合程度有关。从图6中可以看出,细长体在出水前,受水的阻力作用,其速度是逐渐下降的。在出水的时刻(0时刻),细长体的速度发生了“跳跃”增长,这是因为细长体摆脱了水的阻力,进入到空气中飞行造成的。在实验中,当细长体完全脱离了自由液面,进入到空气中飞行后,它的速度仍然呈明显下降趋势,这应该是自由液面上喷溅的水柱拖住细长体尾部,空气阻力以及细长体自身的重力共同作用造成的。

图6 不同长度细长体出水速度
3 数值模拟方法
利用CFD数值模拟软件,对细长体的出水过程进行非定常的模拟研究,湍流模型采用标准k-ε双方程模型,多相流模型采用VOF模型,设置空气、水、水蒸汽三相。本文数值模拟采用均质平衡流(假定汽、水两相间无滑移),连续性方程为:
(4)
动量方程为:
(5)
其中:ρ为混合物的密度;μ为混合物动力粘度;ui为混合物的速度;SM为自定义源项。
湍流模型采用标准的k-ε模型,其基本形式如下:
(6)
(7)
(8)
cμ′=cμ′cDcμ′=cμ′cD
(9)
其中:c1、c2、cμ和σk、σε、σT这6个经验常数分别取1.4、1.92、0.09和1.0、1.3、0.9~1.0。
为了更好地描述自由液面的变化,采用VOF模型模拟多相流,其体积分数方程基本形式如下:
(10)
其中:mpq是从p相传到q相的质量,mqp是从q相传到p相的质量;Sαq是源项。
数值模拟采用二维模型,计算域如图7所示,单位为 mm。网格的划分采用三角形非结构网格,在细长体模型四周、空泡尾部以及自由液面处进行网格加密。计算区域的左右两侧以及底边边界条件设置为无滑移的壁面,顶边边界条件设置为压力出口,相对压力参考点选择在自由液面高度处,考虑重力的影响。细长体长度为20 mm,出水攻角为100 °,初始速度为20 m/s。压力和速度的耦合采用PISO算法,密度和动量采用二阶迎风离散格式。在VOF多相流模型中,体积分数离散采用Geo-Reconstruct格式[14]。
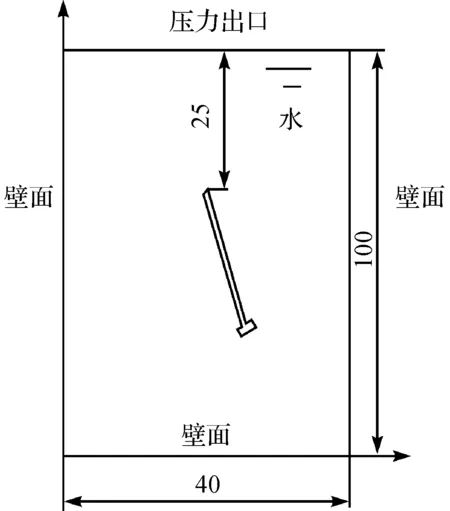
图7 细长体计算区域示意图(单位:mm)
4 数值模拟结果及分析
细长体出水时,其头部与自由液面相互作用的数值模拟液相图如图8所示。图8(1)中,细长体头部尚未接触到自由液面,自由液面处于平静无隆起状态。图8(2)中,细长体开始挤压自由液面,自由液面微微隆起,且细长体背风面先隆起。图8(3)中,细长体头部完全露出液面,细长体迎风面的隆起程度达到顶峰不再增加,而在图8(4)-(5)中,细长体背风面的隆起继续增加且区域变大,图8(6)中,细长体两侧的液峰开始回落消散。对比图9所示的实验照片,两者基本一致。

图8 20 mm长度细长体头部与自由面相互作用数值模拟液相图 注:每两张图片间时间间隔为0.2 ms。

图9 20 mm长度细长体出水时头部与自由液面相互作用照片 注:每两张照片间时间间隔为0.2 ms。
细长体出水时,其尾部与自由液面相互作用的数值模拟液相图如图10所示。图10(1)中,细长体尾部开始与自由液面接触,细长体迎风面的液面隆起的较为陡立,背风面的液面隆起的较为平缓。图10(2)中,迎风面的液面愈发陡立,背风面的液面也开始生长变大,并且隆起范围向右侧扩展。图10(3)-(5)中,细长体尾部拖曳着部分液体离开自由液面,自由液面上出现一个倾斜的三角形液峰。图10(6)中,细长体尾部与液峰完全脱离,液峰在惯性和重力的作用下开始向左倾斜回落消亡。对比图11所示的实验照片,两者基本一致。经过图8—图11的对比可知,虽然实验和数值模拟工况的出水攻角分别为95.5°和100°,两个角度不完全一致,但是得出的出水基本力学过程是相同的。这也说明数值模拟可以用于这个问题的工程实践。实验和数值模拟工况的速度分别为17m/s和20m/s,这两个速度接近,都只能产生局部空泡,因此它们的流动状态相似。
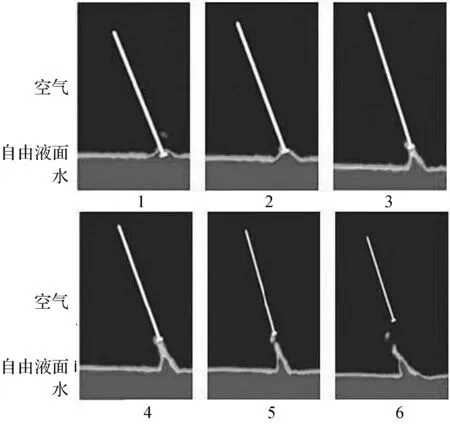
图10 20 mm细长体尾部与自由面相互作用数值模拟液相图 注:每两张图片间时间间隔为0.2 ms。

图11 20 mm细长体出水时尾部与自由液面相互作用照片 注:每两张照片间时间间隔为0.2 ms。
5 结 语
本文采用实验研究与数值模拟相结合的方法,对细长体的倾斜出水问题进行了研究,利用高速摄影仪拍摄到的实验照片以及CFD数值模拟软件模拟得到的液相图,对细长体周围及自由液面上的流场进行了分析。在以后的工作中,为了更好地研究自由液面上的流场变化,需要采用三维的数值模型,并对数值模拟中的相关参数做进一步优化调整,以得到更为准确的结果。
[1]SAVCHENKOYN.Experimentalinvestigationofsupercavitatingmotionofbodies[C]//VandenBraembusscheR.RTOAVTLectureSerieson“SupercavitatingFlows”.Brussels:VKI, 2001: 1-24.
[2] 罗格维诺维奇. 自由边界流动的水动力学[M]. 施红辉, 译. 上海: 上海交通大学出版社, 2012: 7-59.
[3]SAVCHENKOYN,VLASENKOYD,SEMENENKOVN.Experimentalstudiesofhigh-speedcavitatedflows[J].InternationalJournalofFluidMechanicsResearch, 1999, 26(3): 365-374.
[4]LIJUPY,MACHANER,CARTELLIERA.Surgeeffectduringthewaterexitofanaxisymmetricbodytravelingnormaltoaplaneinterface:experimentsandBEMsimulation[J].ExperimentsinFliuds, 2001, 31(3): 241-248.
[5] 顾建农, 高永琪, 张志宏, 等. 系列头型空泡特征及其对细长体阻力特性影响的试验研究[J]. 海军工程大学学报, 2003, 15(4): 5-9.
[6] 熊天红, 张木, 易文俊, 等. 小空化数下带尾翼射弹超空泡减阻试验与数值模拟[J]. 南京理工大学学报, 2013, 37(2): 244-250.
[7] 施红辉, 周浩磊, 吴岩, 等. 伴随超空泡产生的高速细长体入水实验研究[J]. 力学学报, 2012, 44(1): 49-55.
[8] 李凤臣, 邹志林, 蔡伟华, 等. 减阻剂水溶液内弹体入射超空泡特性实验研究[J]. 工程热物理学报, 2010, 31(5): 856-862.
[9] 施红辉, 陈波, 张晓萍, 等. 高速拖拽水槽水动力学特性及尾空化实验研究[J]. 实验流体力学, 2013, 27(5): 44-48.
[10] 陈波, 彭立兵, 施红辉, 等. 细长体出水动力学的实验研究及数值模拟[J]. 实验流体力学,2015, 29(2): 26-31.
[11] 彭立兵. 细长体出水动力学的实验研究及数值模拟[D]. 杭州: 浙江理工大学, 2014: 26-29.
[12] 王献孚. 空化泡和超空化泡流动理论及应用[M]. 北京: 国防工业出版社,2009: 15-16.
[13] 施红辉, 罗喜胜. 可压缩性和高速多相流动[M]. 合肥: 中国科学技术大学出版社,2014: 220-223.
[14] 邹星, 李海涛, 宗智. 结构物出水过程中的自由液面变形研究[J]. 船舶工程,2012, 34(4): 14-17.
(责任编辑: 康锋)
Research on Obliquely Penetrating Water of a Slender Body Accompanying Cavitation Phenomenon
SHIHonghui,ZHOUYangjie,PENGLibing,ZHUBangbang,CHENBo,JIAHuixia
(Faculty of Mechanical Engineering & Automation, Zhejiang Sci-Tech University, Hangzhou 310018, China)
In this paper, the experiment of water-penetrating process of slender bodies with some attack angles is carried out in a self-developed high-speed slender body emitting device. The high-speed photography was used to shoot the cavitating flow around the slender body and disturbance of slender body to free surface; besides, the interaction between slender bodies and free surface when such slender bodies obliquely penetrate out of water was simulated by using the CFD numerical simulation software. The results show that the supercavitation is induced when the sailing speed of the slender body is sufficiently high; the speed of the slender body will suddenly increase before and after the slender body enters into the air from the water; the influence of the sharp head of the slender body on the upswelling of the free surface is small while the influence of the blunt tail on the upswelling of free surface is more great. The simulated result is rather consistent with the experimental result.
slender bodies; high-speed photography; obliquely penetrate; supercavitation; numerical simulation
10.3969/j.issn.1673-3851.2016.05.012
2015-09-23
浙江省自然科学基金项目(LY16A020003,LQ13A020005,LQ13A020006, Z1110123)
施红辉(1962-),男,江苏启东人,教授,博士生导师,主要从事超空泡射弹动力学、超高速发射装置、气泡动力学、三维湍流边界层方面的研究。
O352;O359
A
1673- 3851 (2016) 03- 0392- 06 引用页码: 050404
猜你喜欢
一重技术(2021年5期)2022-01-18
上海交通大学学报(2021年8期)2021-09-02
北京航空航天大学学报(2021年7期)2021-08-13
数字海洋与水下攻防(2021年2期)2021-05-08
小学阅读指南·低年级版(2020年9期)2020-10-12
阅读(科学探秘)(2019年4期)2019-06-19
读写算(2018年2期)2018-07-05
舰船科学技术(2017年11期)2017-11-27
航空工程进展(2017年2期)2017-06-13
船海工程(2015年4期)2016-01-05