自动导引三向堆垛叉车在窄巷道中的应用
2016-09-14 01:32:35浙江诺力机械股份有限公司刘光胜
物流技术与应用 2016年8期
浙江诺力机械股份有限公司 / 刘光胜
自动导引三向堆垛叉车在窄巷道中的应用
浙江诺力机械股份有限公司 / 刘光胜
本文介绍了一种区别于普通AGV的自动导引三向堆垛叉车的技术特点,并着重介绍了该类型叉车在有限空间内如何自动实现货叉独立转向,与货架工位对接,并最终完成装卸任务。
物流系统、AGV、三向堆垛叉车、窄巷道
从20世纪80年代以来,自动导引运输车(AGV)逐渐发展成为生产物流系统中最大的专业分支之一,并出现产业化发展的趋势。由于具有良好的环境适应能力、很强的抗干扰能力和目标识别能力,AGV在工业、军事、交通运输等领域得到一定程度的应用。
然而,在一些生产企业的厂区,由于受空间布局的约束,或者在库容量要求较大而货架之间的距离较窄,普通的AGV在窄巷道中无法实现转向运行,货叉与货架工位无法有效对接,中途需要加入人工或其他设备辅助,以致AGV不能充分发挥优势。在这样的情况下,自动导引三向堆垛叉车技术的研究和应用便显得尤为关键。
一、普通AGV的特点
1.整体结构分析
普通AGV是融合了电子技术和机械技术的典型机电一体化产品。它由车体、蓄电池、充电系统、驱动装置、转向装置、精确停车装置、运动控制器、通信装置、移载系统和导航系统等组成。
2.整体控制方式分析
普通AGV是在传统电动堆垛叉车的基础上增加了智能导航系统和控制系统,货叉与车体的运行均由控制器控制,货叉与车体没用独立的转向控制系统,货叉的转向必须与车体转向同步运行,整车的灵活性较差。
3.转向路径分析
普通AGV在货架通道中正常存取货物时,需要车体整体转向后,才能变更货叉的运行方向,所以其转弯半径较大,只能在货区通道较宽的空间范围内应用,且转弯耗时较长,不利于工作效率的提高。普通AGV在较宽货架通道中转向的运行轨迹,如图1所示。根据以上分析,如何改变普通AGV在货架通道中的转向方式,实现货叉与货架工位的精准对接,成为技术研发的关键和难点。
二、自动导引三向堆垛叉车的技术分析
三向堆垛叉车具有向前、向左和向右三向操作功能, 可在更狭窄的通道中工作,能够有效地运用仓库的高度和宽度以增加储存面积,从而提高库房的使用效率,目前已经广泛应用于机械制造、制药等行业以及超市商场、食品冷库等场地实施装卸、储存、搬运、堆垛作业。
因此,利用三向堆垛叉车的优点,在最大化降低工厂改造、搭建、维护、管理等各项运营成本的前提下,我们对三向堆垛叉车的车体结构、三向堆垛头进行改造,并对其控制方式进行变更,研发了自动导引三向堆垛叉车(如图2所示),使得其集普通AGV、电动堆垛叉车、有轨堆垛机之优点于一身,能够解除货架窄巷道对普通AGV空间范围的限制,解决了其在窄道中难以转向完成装卸载货物的难题。
1.导航方式
由于货区窄巷道空间有限,为保障导引航线较为精确并节约地面空间,我们设计的自动导引三向堆垛叉车选用激光自动导航方式。激光导引技术较为先进,定位精确,地面无需其他定位设施,能够适应复杂的路径条件及工作环境,能快速变更行驶路径和修改运行参数。当然,自动导引三向堆垛叉车的导航方式较多,在实际应用中可以根据需要做出改变。
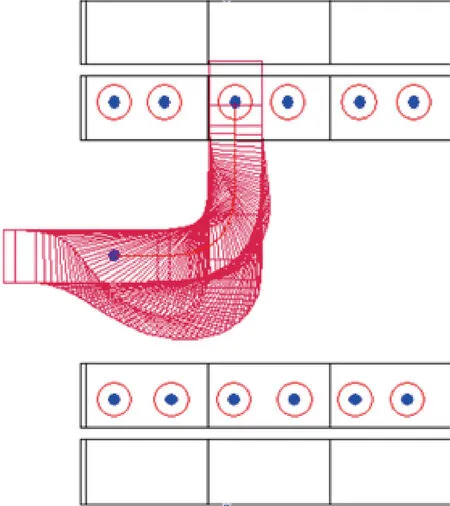
>> 图1 普通AGV的转向轨迹

>> 图2 自动导引三向堆垛叉车
2.整体结构设计
自动导引三向堆垛叉车是对普通三向堆垛叉车的三向堆垛头进行改装并增加伺服驱动等装置,使得货叉的运动变得更为灵敏和准确。设备整体的尺寸与所承载的货物和通道宽度相适应,对货叉尺寸做出适度调整,占据的空间位置缩小,但依然适应多种规格的托盘,可在通道中多层货架或货物存储高低差较大的场合应用。
自动导引三向堆垛叉车的货叉能在X轴方向进行立面0~180度旋转,不需要对车体重复规划转向路径,可在不改变叉车整体运动方向的基础上,在左右两边的货架之间变更货叉的运动朝向,顺利完成装卸载任务;在Y轴方向依然可以实现货叉的水平侧移,帮助货叉更精准地对接工位;在Z轴方向采用液压油缸升降式,用链条连接货叉架并带动货叉,货叉随控制器发出的指令,升降到任务所需的货架位置,实现从地面到高层货架的移动。自动导引三向堆垛叉车的货叉转向形态,如图3所示。
3.控制方式
自动导引三向堆垛叉车整个车体的驱动和转向操作是都由主控制器完成的,但在整体控制和货叉控制方面,主控制器做了分项管理,具体系统控制结构如图4所示。
自动导引三向堆垛叉车的货叉与车体均独立安装转动电机和驱动伺服等装置。货叉在控制器设定好的程序下做出转向、加减速度、前进、后退、上升、下降、装卸载等动作,完成相应任务。
控制器控制自动导引三向堆垛叉车在窄巷道中完成任务的过程如下:在控制系统里录入货架工位编号和位置等信息,规定自动导引三向堆垛叉车的运行速度和货叉运行速度。根据任务安排,控制器控制叉车在窄巷道中直线前进或后退的运动,定位在货架工位的待操作点后停止运行。如果货架工位在货架底层,控制器只需控制货叉的转向与速度,使货叉运动朝向对准目标工位,即可实施装卸载的操作;待装卸载完成后,控制器再控制货叉下降并进行侧向移动或者0~180度转向,使货叉方向与叉车下一个任务点要求一致,叉车在窄巷道中继续前行或后退,到达另一个任务点。当目标工位在货架的高层位置时,自动导引三向堆垛叉车到达目标工位的底层后停止运行,控制器再控制货叉在竖直方向做提升运动,到达目标工位完成装卸载任务后下降到地面初始位置,货叉回到叉车的下一个任务点要求的位置,叉车继续前往下一个任务点。

>> 图3 自动导引三向堆垛叉车货叉转向形态
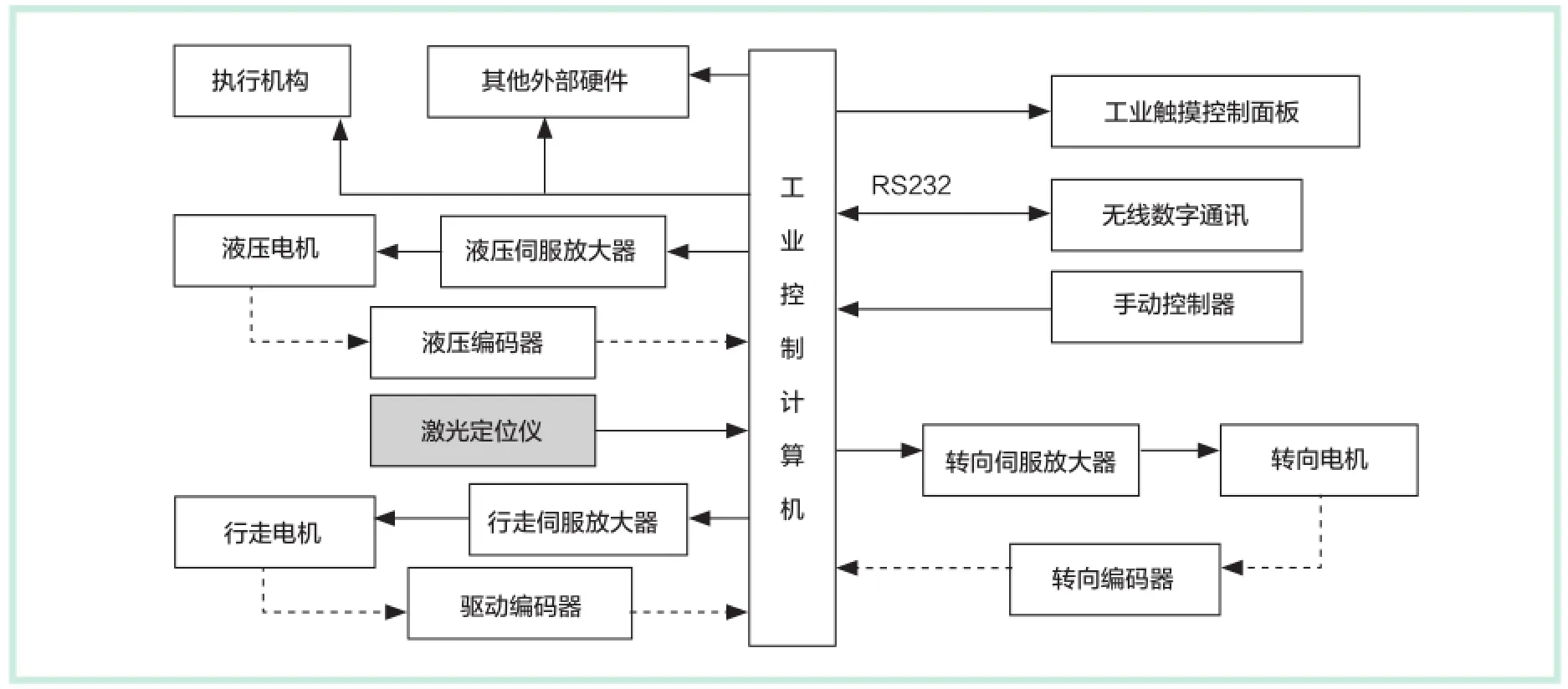
>> 图4 自动导引三向堆垛叉车的系统控制图
4.路径分析
货叉独立转向功能,使得自动导引三向堆垛叉车在窄巷道中无需做叉车整体转向的路径规划,AGV整体的运行轨迹只需直线前进或后退, 可在货架窄巷道中多个工位点间反复实现运送操作,而不需要考虑空间范围的限制,避免了叉车整体转向造成的时间浪费,提高了叉车运行效率,也减轻了繁琐的转向路径程序编制的工作量。
三、自动导引三向堆垛叉车的优势和前景
对AGV发展前景的分析,应主要着眼于AGV与传统运输工具相比在可靠性、应用领域的适应性及对环境的要求等方面。自动导引三向堆垛叉车与普通AGV相比,其优势表现在以下几个方面。
1.环境适应性
自动导引三向堆垛叉车的研发具有针对性,在特殊工作环境下可以解决环境空间的限制,在正常工作环境下也能发挥堆垛叉车的作用,对环境的适应性极强。
2.可靠性
自动导引三向堆垛叉车的结构设计与系统控制是在稳定成熟的技术上进行的,可靠性强,应用灵活方便。
3.应用成本
自动导引三向堆垛叉车是在最大化降低工厂改造、搭建、维护、管理等各项运营成本前提下进行的部件改造和程序的更改,应用成本较低,在较多的中小企业和厂区都能够得到广泛应用。同时可以根据现场环境进行非标准定制,使其更具灵活性。
由于多方面原因,目前很多企业厂房的空间布局设计常会出现窄巷道式货架这样的特殊工作区域。在未来AGV的应用中,带有自动转向功能的自动导引三向堆垛叉车将成为市场的主导力量。
四、结束语
自动导引三向堆垛叉车的应用理论具有针对性,车体结构及三向堆垛头的改造易于实现和生产,对工作环境的条件要求较低。自动导引三向堆垛叉车从理论建立到实际应用,证明了其能解决普通AGV在货架窄巷道中无法转向的问题,扩展了AGV的环境适应能力,充分发挥了AGV的智能性,是解决现有问题行之有效的办法。
猜你喜欢
大地测量与地球动力学(2022年7期)2022-07-06 14:40:48
房地产导刊(2021年12期)2021-12-31 05:15:50
物流技术与应用(2021年11期)2021-12-27 05:17:20
金属加工(冷加工)(2020年6期)2020-07-09 09:20:12
建材世界(2020年1期)2020-05-24 08:15:44
设备管理与维修(2020年15期)2020-02-15 19:32:47
制造业自动化(2018年10期)2018-11-02 09:51:40
测绘学报(2017年1期)2017-02-16 08:24:31
芳草·文学杂志(2015年3期)2015-05-28 12:31:08
河南科技(2014年19期)2014-02-27 14:15:38