
在干线上采用双向协调控制的交通信号灯
2016-09-13 01:20郭荣祥王建华
陕西理工大学学报(自然科学版) 2016年4期
郭荣祥, 刘 清, 王建华
(1.内蒙古科技大学 信息工程学院, 内蒙古 包头 014010;2.包头市红日电气控制责任有限公司, 内蒙古 包头 014030)
在干线上采用双向协调控制的交通信号灯
郭荣祥1,刘清1,王建华2
(1.内蒙古科技大学 信息工程学院, 内蒙古 包头 014010;2.包头市红日电气控制责任有限公司, 内蒙古 包头 014030)
针对当前城市内复杂的交通路况以及各个路口较低的通行效率,设计了一种主要面向路况中主干道与次干道分明的交通信号灯系统,在主干道上采用双向干线协调控制。当交通非饱和状态时,在一种改进的相位模式下,以降低车辆延误为目的,建立交通系统数学模型,并根据数学模型对路段进行优化和配时。选择数传电台实现相邻路口间的通讯,选择GRM模块实现路口与远端监控中心的通讯,并给出了相应的电路设计。
交通信号灯;协调控制;数学模型;数传电台;GRM模块
在交通控制技术的研究上,我国在单个路口的控制上取得了很多突破性进步,可是单点控制的进步并没有使得交通状况得到明显改善,所以在一些一线城市,仍需要使用西方发达国家的交通控制系统来缓解复杂的交通问题,只是这些系统的价格十分昂贵,因此发展我国自主的优秀交通控制系统显得十分重要。交通控制系统中的问题,归根结底是通行效率的问题,也就是绿灯利用率的问题。例如:在某一个方向已经没有车辆通行,但这个方向的绿灯却依旧点亮,而另一个方向却因为红灯造成过多的车辆等待;南向北与北向南的车流量有明显差距,但是却要遵循同样的配时方案,这些情况就是绿灯时间利用率低的表现。对于城市交通控制应该针对不同的道路和车流量情况,采用不同的控制方案,一个好的城市交通控制系统是需要多种不同特点的控制方案组成。本文仅对城市中车流量最大的主干线进行研究,在主干线上实现双向协调控制,在保证不影响其他路段效率的前提下提高主干线的通行效率[1-3]。
1 干线双向协调控制的相位
传统相位在主干线的两个方向的行驶车辆处于同一相位中,这样的相位不利于干线上的双向协调控制,改进后的相位如图1所示。4个相位不是按照顺序执行,而是根据不同的路口和路况,做不同的调整。其中相位1和相位2为主干线上的两个相位,由南向北的车辆与由北向南的车辆在大部分情况下互不影响。由于右转的车辆会对直行的车辆造成干扰,所以在相位1中,由东向西行驶并右转的车辆禁止通行;相位2中由西向东行驶并右转的车辆禁止通行,这种方式减少了支路上右转车辆对主干线的干扰。因为相邻的两路口之间距离一般不同,如果把每组两两相邻路口之间的距离看作单独的路段,那车辆经过每段路段的时间就不同,这就使相位1和相位2之间的关系有了3种情况,第1种情况是相位1、2连续,第二种情况是相位1、2重合,第3种情况是相位1、2间断。第一种是最理想的情况;第二种也是一种比较理想的情况,在这种情况下的路口,使用最常见相位即可;第三种不是一种理想的情况但却是最常见的情况,如果相位1、2的间隔时间过短或过长就要对其进行优化,所以在实际应用中要尽量减少第三种情况的发生或者使相位1、2之间的间隔在一个合理的范围内。
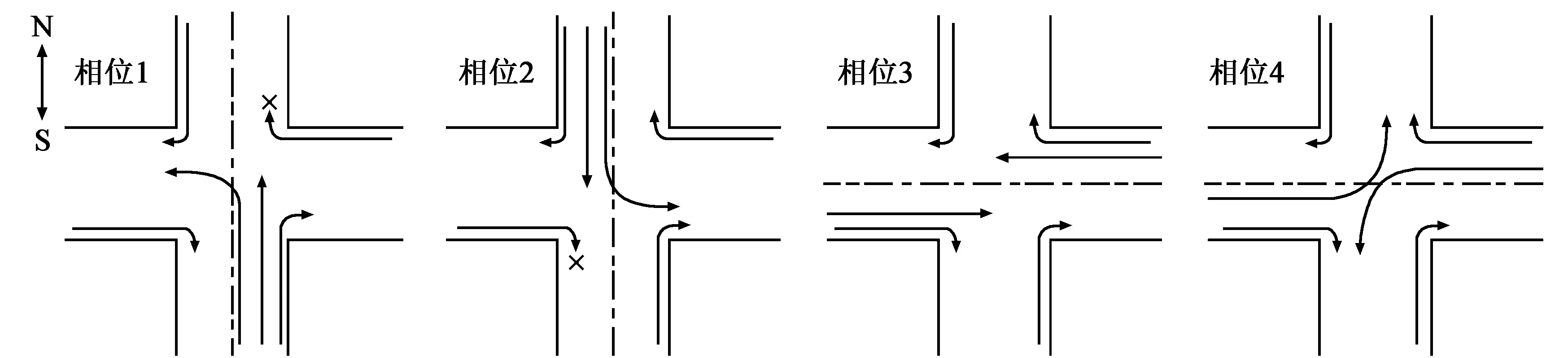
图1 改进后的四相位控制
2 主干线车辆延误模型与优化
2.1车辆延误数学模型
本文中的数学模型是在干线上处于不饱和状态下的模型,为了更直观地体现出各个参数对车辆延误的影响,把黄灯时间算到绿灯时间里,并假设所有车辆到达路口的方式相同[4]。
设主干线上共有n个路口,分别命名为X1,X2,…,Xn,从X1到Xn设定为上行方向,反之为下行方向,Di,i+1为路口Xi与Xi+1之间的距离。对于上行车流,定义Ti,i+1为车流从Xi到Xi+1的时间,则有:
其中T为交通灯的周期,modT为对周期T取余,Vi,i+1为路口Xi到Xi+1的限速,亦即车辆在这段路上的速度,Ci,i+1为相邻两路口的相位差。把Ti,i+1和Ci,i+1之间的关系分为3种情况讨论。
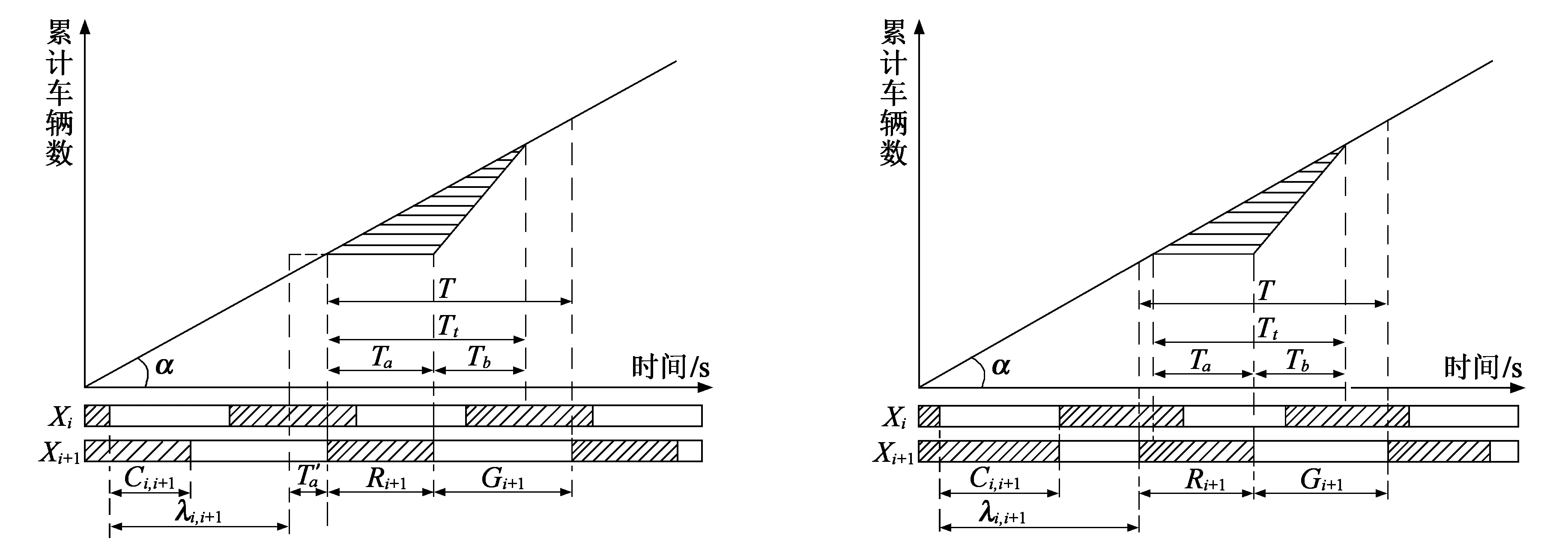
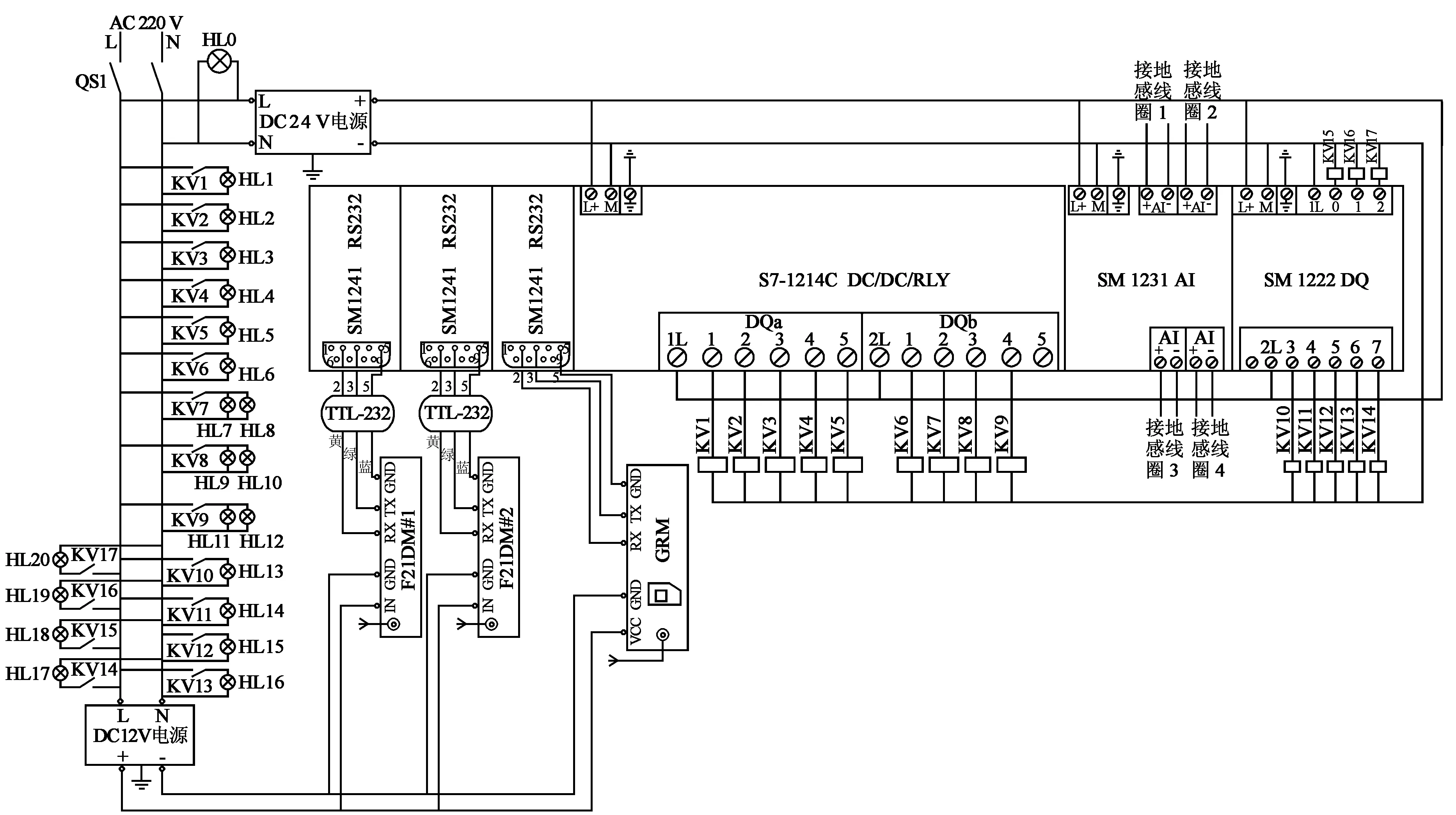
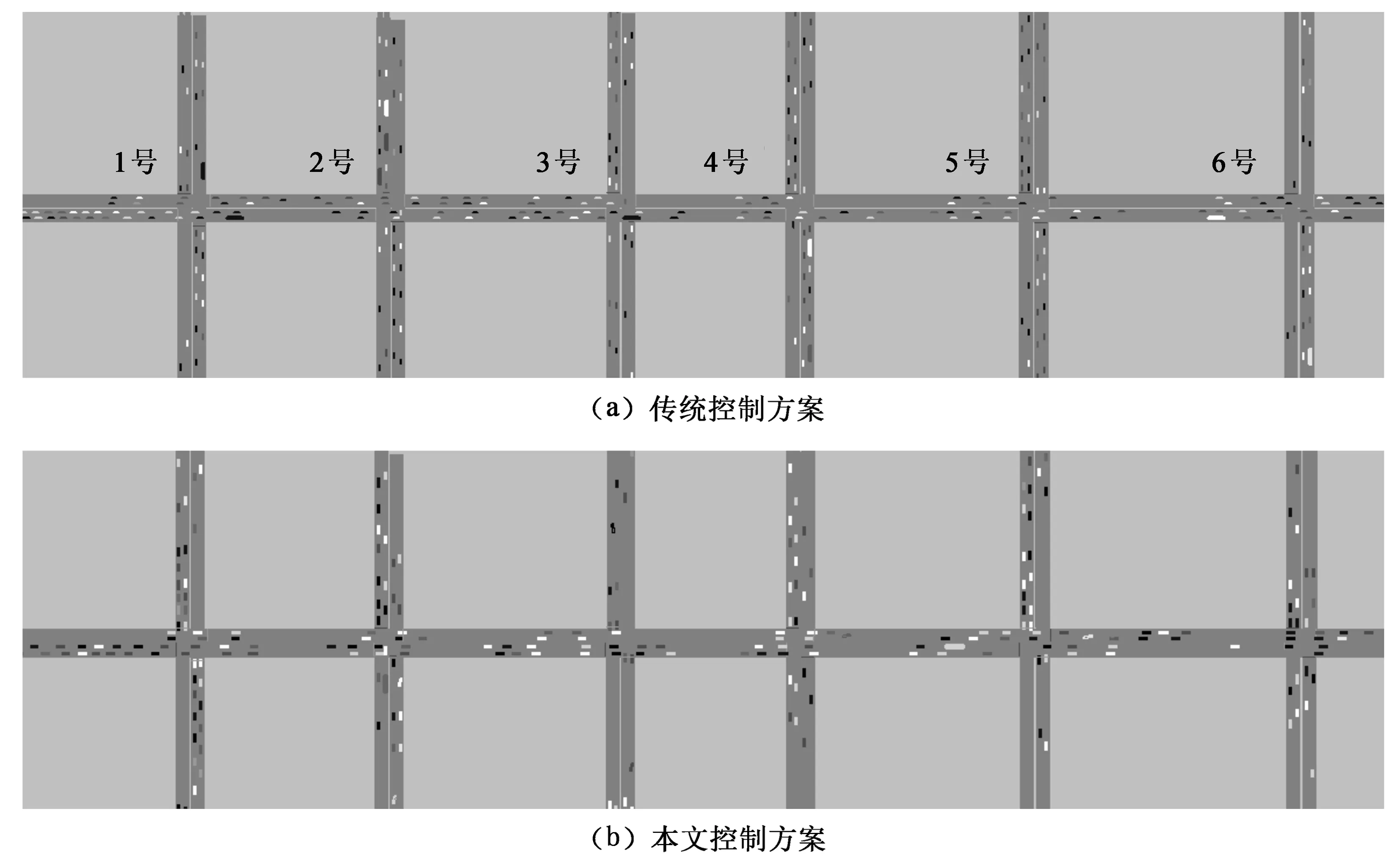
(1)0≤Ti,i+1 (1) 设Tb为Xi+1路口车辆的疏通时间,有Tb≤Gi+1,其中Gi+1为Xi+1的绿灯时间。因为在本文的相位中,排除了次干线上右转车辆对主干线的影响,所以在此时间内,可以假设车队能以最大通行效率通过该路口,则有: (2) 图2 车队到达时为红灯的情况 其中qi,i+1为Xi到Xi+1的上行车流量,Bi+1为绿灯时Xi的饱和流量释放。通过图2可以清晰看出车辆延误和各个参数之间的关系,得出车头受阻时的车辆延误。设车辆延误为mi,i+1,则有: mi,i+1=0.5Taqi,i+1(Ta+Tb)。 (3) 将(1)式和(2)式代入(3)式得到: (4) (5) 假设车队能以最大效率通过路口,又有: (6) 其中Ri+1为Xi+1路口的红灯时间。通过图3可得到车辆延误: (7) 将(5)式和(6)式代入(7)式,可得: (8) (3)Ci,i+1+Gi+1≤Ti,i+1 (9) 由式(4)、(8)、(9)可得到干线上上行车辆总延误: (10) 其中αi+1+βi+1+γi+1=1。 图3 车队没有完全通过即遇到红灯的情况 图4 完全浪费掉一次绿灯时间的情况 同理可得干线下行车辆总延误为 (11) 通过对数学模型的分析,可知造成干线车辆延误的参数有:干线总周期T、相位差Ci,i+1、路口i到i+1的行车时间Ti,i+1、路口的最大通行能力Bi+1、车流量qi,i+1。又因为建模的3种情况是根据绿灯时间Gi+1而设定的,所以,绿灯时间也要考虑,最后得到各个路口在不同时间段的红绿灯初始时间,其后每天会根据前一天的历史数据进行调整。 2.2干线协调控制的优化 在确定好了干线上的公共周期时间和绿信比后,就可以通过上一节的几何模型求出各个路口的不同配时方案。公共周期时间、有效绿灯时间的优化如下[4]: (1)公共周期的优化区间 对于单个路口的周期配时,应选同一相位中流量比最大的进行计算,最短周期表达式: 其中Tmin为最短周期,L为单个周期的损失时间,Y为路口总的交通流量比。 对于最长周期时间,在实际应用过程中,周期超过200 s时,通行能力缓慢,延误增长却很快,所以,把200 s设定为最长周期时间。 (2)有效绿灯时间的优化区间 直行中最小有效绿灯时间设定为15 s,最长有效绿灯时间设定为60 s。而最优有效绿灯时间可根据饱和度的公式计算: 其中Gop(i)为最优有效绿灯时间,qi为路口流量,T为周期时间,si为饱和流量,xi为饱和度(根据大量数据推算,取0.9为宜)。 因本文涉及路口较少,所以不需要大量的计算,若大规模应用需要大量的运算时,要采用更加先进的优化算法,例如粒子群算法、蚁群算法等[4-5]。 2.3干线协调控制策略 本文的干线协调控制策略为:在协调控制路段两端路口执行定时控制,相当于定时向被控制干线内放行车辆,定时控制的配时根据交通流量和数学模型得出,在协调控制内部各个路口之间通过电台实现通讯[6],达到协调联控效果,交通路口的数据要通过GRM模块传送到远端控制中心,远端控制中心可实时监控各路口情况,并可在控制中心修改交通信号配时方案(一般要在午夜进行)。 本文的硬件系统接线如图5所示,选用西门子S7-1214C型PLC作为信号灯的控制器,选用北京捷麦公司生产的F21DL型数传电台实现各路口PLC之间的通讯,在每个路口安放一台PLC以及两台数传电台,一台负责向上一个路口收发数据,一台负责向下一个路口收发数据。因F21DL模块输出为TTL电平,所以PLC需通过TTL-232转换线与电台相连,转换线的TTL端接到F21DL,232端接PLC的SM1241-RS 232模块。数传电台模块在使用中需要设置身份地址,身份地址分为工程号和站点号,同一工程中工程号相同,这里为1;每一台数传电台拥有自己唯一的站点号,本文中电台模块的站点号从001开始依次递增。 图5 系统接线图 为了实现各个路口的交通数据向远方监控中心的传输,以及实现在远端操作中心完成对各个路口参数的修改,本文选用了巨控公司的GRM504-N2L模块。该模块通过网线即可与S 7-1214C通讯,插入标准的SIM卡即可完成与互联网的连接。因为GRM504-N2L模块支持标准OPC2.0协议,所以远端的PC机安装OpcServer即可实现与GRM504-N2L的通讯。 图6 地感线圈原理图 本文选用地感线圈采集干线上的车流量,与一般检测方式相同,在距离路口150 m处和路口处,各安置两个地感线圈,通过进入这段区域加一、行驶出这段区域减一的原则计算堵车的数量。由于是干线协调控制,这里不考虑转弯车辆。地感线圈原理如图6所示。 U1和U2组合为共射极振荡器,R3是两只三极管的公共射极电阻,并构成正反馈,地感线圈T作为检测器谐振电路中的一个电感元件与振荡回路一起形成LC谐振。 有汽车经过时,线圈中磁通量变大,使得线圈电感值变化,继而LC谐振频率变化,这个信号再经过R7和C3的滤波,得到0~10 V电压信号,PLC通过对电压的判断,得出是否有车辆通过。 本文选用Visual Basic 6.0作为监控管理软件的开发工具,因为VB在数据库开发上有一定优势[7]。 因为监控的数据由GRM504-N2L模块传输而来,所以需要VB连接到OPC服务器的主要代码如下: Dim With Events My OPC Server As OPC Server Dim With Events My OPC Group As OPC Group Set My OPC Server=New OPC Server My OPC Server. Connect ″OPC. Simatic NET″ 监控中心主界面如图7所示,此监控中心分为3个功能:历史数据查询、实时数据查看、交通灯参数修改。 本文的全部历史数据都保存在数据库中,对这些数据的新增、删除、查找等操作都是依靠数据库访问技术来实现[8]。本文选用的是ADO技术,在使用前添加到VB的控件工具箱即可。历史数据查询窗口如图8所示。 图7 监控中心主界面 图8 历史数据查询窗口 实时数据查询可显示当前堵车数量,操作人员可在PC上看到各个路口的堵车情况。参数修改功能下可以在操作中心对PLC的程序进行修改,该按钮需要调用与GRM504-N2L模块配套使用的GVCOM程序,用来对远处的PLC下载程序,该部分的代码如下: Dim RetVal RetVal=Shell(″C:Program FilesGVCOMGVCOM.EXE″,1) 工作人员可以根据历史数据对交通信号灯的参数做出调整。 本文选用VISSIM软件进行控制策略仿真[9],根据第2章的模型对包头市阿尔丁大街的一段6路口干线进行两次仿真,且系统的各条路段输入的车流量信息一致,均为该路段8:00—9:00之间的车流量数据。第一次仿真采用传统控制策略,第二次采用干线双向协调控制策略,仿真过程如图9所示。可以看出在传统控制策略下的通行效率偏低,而在干线双向协调控制下,车辆对绿灯的利用率有明显提高。 图9 控制策略仿真 本文通过数学建模的方式设计了一种主要面向路况中主干道与次干道分明的交通信号灯的控制策略,结合控制策略的特点设计了硬件系统,系统中两两路口之间的通讯依靠电台实现,路口与监控中心的通讯通过GRM模块实现。在仿真测试中,干线延误率降低了17%,在实际的小规模试验中也取得了不错的结果,本文的设计思想具有较大的实际意义,值得在此基础上继续深入研究。 [1]桂伟,张红霞,陈皓.交通灯计时智能调整系统的研究现状与发展趋势探讨[J].科技创业月刊,2015,28(7):17-18. [2]金稳.多相位智能交通控制器的研究[D].杭州:浙江大学,2007. [3]胡明伟.交通系统规划与控制[M].北京:中国物资出版社,2010. [4]徐世洪.道路交通干线的信号协调控制技术研究[D].重庆:重庆大学,2011. [5]宋依青,张润.自适应交通灯控制系统的设计与实现[J].计算机测量与控制,2008,16(4):497-499. [6]郭荣祥,马和平,陈树树.数传电台与GPRS相结合的水厂遥控系统研究和设计[J].自动化技术与应用,2010,29(11):54-57. [7]张祥.基于GPRS技术的农村用水远程自动抄表系统的设计与实现[D].包头:内蒙古科技大学,2015. [8]ADLER J L,BLUE V J.A cooperative multi-agent transportation management and route guidance system[J].Transportation Research Part C Emerging Technologies,2002,10(5/6):433-454. [9]章玉,于雷,赵娜乐,等.SPSA算法在微观交通仿真模型VISSIM参数标定中的应用[J].交通运输系统工程与信息,2010,10(4):44-49. [责任编辑:谢 平] Traffic light signaling based on bidirectional coordinated control on the trunk road GUO Rong-xiang1,LIU Qing1,WANG Jian-hua2 (1.School of information Engineering, Inner Mongolia University of Science and Technology,Baotou 014010, China;2.Baotou Red-Sun Electric Control Co. Ltd., Baotou 014030, China) A traffic light signaling system, which uses two-way coordination control on the trunk roads as differentiated from secondary roads, is designed to deal with the complex traffic conditions in the city and the traffic efficiency of each intersection. We have designed a traffic system mathematical model by improving the model phase mainly to reduce delay when traffic is not seriously heavy. And based on the mathematical model, optimization and matching can be made. The communication between the adjacent intersections is realized by selecting the digital radio, and the communication between the adjacent intersections and monitoring center is realized by GRM module. At last the corresponding circuit is given. traffic light;coordinated control;mathematical model;digital radio;GRM module 1673-2944(2016)04-0039-06 2016-03-05 2016-04-29 郭荣祥(1963—),男,内蒙古和林县人,内蒙古科技大学教授,硕士生导师,硕士,主要研究方向为遥控、遥测及其控制系统集成等;刘清(1991—),男,黑龙江省宝清县人,内蒙古科技大学硕士研究生,主要研究方向为遥控、遥测及其控制系统集成。 TP872 A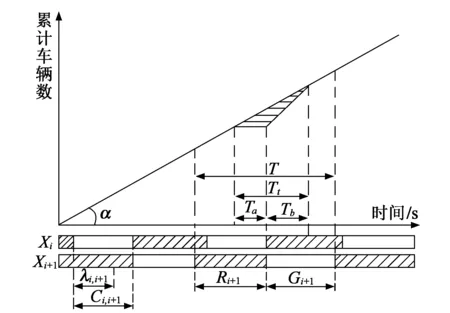


3 控制电路设计

4 监控中心设计

5 采用VISSIM软件仿真
6 结 论
猜你喜欢
电气开关(2021年6期)2021-07-05中国房地产业·上旬(2019年8期)2019-09-27自动化学报(2017年4期)2017-06-15数学教学通讯·初中版(2015年5期)2015-06-17电网与清洁能源(2015年2期)2015-02-28山西建筑(2014年15期)2014-06-06中国交通信息化(2014年6期)2014-06-05电测与仪表(2014年22期)2014-04-04电视技术(2014年19期)2014-03-11电力工程技术(2012年5期)2012-03-25
