霍尔位置传感器无刷直流电机起动控制策略
2016-09-13 03:24:36王培良蔡志端
中国测试 2016年8期
荀 倩,吴 勇,王培良,蔡志端
(1.湖州师范学院工学院,浙江 湖州 313000;2.英威腾电气股份有限公司,江苏 苏州 215000)
霍尔位置传感器无刷直流电机起动控制策略
荀倩1,吴勇2,王培良1,蔡志端1
(1.湖州师范学院工学院,浙江 湖州 313000;2.英威腾电气股份有限公司,江苏苏州215000)
针对电机在低速起动或转速特别低时霍尔输出信号不稳定问题,结合方波控制出力大与矢量控制转矩脉动和噪声小的优点,研究基于霍尔位置传感器的无刷直流电机方波与正弦波复合控制的电机驱动器。在分析霍尔估算原理的基础上,对采用霍尔位置传感器的无刷直流电机矢量控制的起动策略进行研究,分析对比方波控制与正弦波控制在不同负载转矩时的起动性能。仿真与实验表明:为确保电机的平稳起动,根据不同起动要求的场合,可以选择正弦波直接起动和方波切换正弦波起动,该文研究的起动控制策略能有效拓宽无刷直流电机在低速大转矩场合下的应用。
方波控制;矢量控制;霍尔位置传感器;正弦波直接起动;方波切换正弦波起动
0 引言
无刷直流电机(BLDCM)具有结构简单、调速范围宽等优点[1],广泛应用于航空航天(雷达伺服、离心泵、舵机驱动、惯性导航设备等)、交通工具(纯电动汽车、混合电动汽车、电动自行车等)、家用电器(冰箱、洗衣机、空调、风扇等)等领域[2]。
无刷直流电机通常采用方波控制,通过霍尔位置传感器的输出信号确定转子位置,其控制简单,出力大,但转矩脉动和噪声较大[3],已不能满足要求,为减小转矩脉动和噪声,已将矢量控制应用于无刷直流电机中[4-6],而矢量控制在某些低速大扭矩场合会存在起动不成功的问题[7],因此结合方波与矢量控制的优点,研究方波与正弦波复合控制的电机驱动器可得到具有出力大、转矩脉动和噪声小的控制策略。
文献[8]针对BLDCM绕组线、霍尔输出信号线与控制器的接法不匹配造成的电机出力小、转矩脉动增加的问题,提出了一种电机转子位置自学习策略,经过一次位置自学习,就可以正常运转,解决了电机起动时的控制信号不匹配问题。文献[9]对无刷直流电机采用方波驱动与正弦波驱动方式的转矩-转速、转矩脉动性能进行了对比,得到了正弦波控制特性优于方波控制特性。文献[10]对方波驱动与正弦波驱动模式的动态切换进行了研究,但其切换点是由外部按键进行控制,并未根据转速或负载等原因造成起动不成功情况进行分析,不能进行自动切换,没有分析不同负载条件下的起动性能。
本文在分析霍尔位置估算原理的基础上,重点对无刷直流电机矢量控制的起动策略做出了详细分析与研究,采用仿真与实验对方波切换起动方式与直接正弦波起动方式的起动性能进行研究。
1 霍尔位置估算原理
基于霍尔位置传感器的转速和转子位置估算方法建立在电机稳定运行且能够准确获取转速、位置等信息的基础之上。通常情况下,将3个霍尔元件安装在空间相隔120°的圆周上,相对于每一相定子绕组超前30°或者90°电角度。以1对极电机为例,霍尔传感器超前90°安装的位置示意图如图1所示,a、b、c代表三相霍尔传感器,OA、OB、OC构成的坐标系与三相定子绕组轴线对应,N、S为转子。
转子在旋转时,霍尔位置传感器根据其旋转速度输出频率可变的矩形波。当转子旋转一周,产生的霍尔信号为三路相位相差120°电角度的180°脉宽的矩形波,一个360°的电角度周期被划分为6个60°的霍尔区间,三相反电势与霍尔信号的对应关系如图2所示。eA、eB、eC为电机三相反电势,Ha、Hb、Hc为三相霍尔信号,三相霍尔信号将360°电角度划分的6个60°霍尔扇区分别对应霍尔扇区I、II、III、IV、V、VI。

图1 三相霍尔安装位置示意图

图2 三相霍尔信号与反电势对应关系
可以得出霍尔状态与区间的对应关系如表1所示。当电机连续运行时,由变化的霍尔信号状态就可以判断出电机转子所处的旋转方向和位置区间。假定逆时针方向为正向,若霍尔信号由110状态转换为010状态,可以确定电机为正向旋转,并且已经进入霍尔区间IV。

表1 霍尔状态与区间对应关系
转子的转向和位置区间确定之后,就可以对转子的具体位置信息进行估算。设某一相霍尔180°间隔的时间为Δt,则在此区间内电机的平均电角速度ωe为

设PWM周期为T,一个电角度周期为T1,在每个电角度周期内,转子转动2π rad,则可以计算出每个PWM周期的转子角度变化量为2πT/T1,然后在每次控制算法执行时在上一次角度的基础上对这个角度变化量进行积分,就可以实时估算出转子位置角度θ。
2 起动控制策略
电机转速很低时,由霍尔信号只能得到6个离散的转子位置,采用位置估算方法计算得到的角度增量和转速误差较大,因此电机起动过程需要进行特殊处理。目前,应用最广泛的BLDCM矢量控制起动方法[4]分为两种:1)方波切换起动,起动之初采用两两导通六步换相,待电机加速到一定值后切换到根据估算位置同步的矢量控制;2)直接正弦波起动,起动开始阶段即采用同步坐标矢量控制。
2.1方波切换起动方法
一般情况下,方波控制为两两导通控制方式,逆变器开关管采用上桥臂PWM、下桥臂恒通控制方式,同一时刻有两个开关管处于导通状态。而矢量控制为三三导通模式,同一时刻有3个开关管处于导通状态,且同一桥臂的两个开关管处于互补导通状态。因此,必须考虑切换时开关管的导通状态以及转子位置才能实现方波与正弦波的动态切换。根据霍尔信号与转子位置的对应关系可得方波控制与矢量控制时霍尔信号与开关管导通对应关系如表2所示。其中,“ON”表示上桥臂开关管导通,“OFF”表示关断,“NC”表示该相桥臂不导通。
由表可知,切换时只需要某一相开关管的导通状态发生变化。方波切换控制实现过程如下:切换过程完全通过软件编程实现,电机起动时采用方波控制方式,当转速达到某一设定值时切换为矢量控制方式。检测到需要切换时,并不进行立即切换,而是等到霍尔信号发生跳变时进行,因为每次霍尔信号跳变,估计转子位置会进行一次校准,这样转子位置误差可降至最小。当速度再次小于稳定值时,重新切回方波控制,为避免切换时出现震荡,切换控制过程采用滞环控制。

表2 霍尔信号与开关管导通关系
2.2正弦波直接起动方法
采用直接正弦波起动方法,在低速时通过60°分辨率的位置信号能够获得电机需要转矩,相比于两两导通起动方式,转矩脉动更小。
电机起动时,根据霍尔位置传感器输出信号得到起动初始位置,即转子所在当前霍尔扇区的中间位置,角度误差控制在±30°范围内,然后根据给定转速或电流信息,执行矢量控制算法,通过SVPWM调制计算出合成作用电压矢量。由于霍尔位置传感器输出信号在起动过程中分辨率较低,起动开始的几个霍尔扇区,电角度不进行实时更新,而是每隔60°电角度更新一次,当转速大于一定阈值后,通过实时测得的位置信号更新当前电角度。

图3 BLDCM双闭环控制仿真框图
3 仿真与实验
本文搭建的仿真框图如图3所示。BLDCM的控制以id=0的矢量控制策略为主,而在电机起动时需要根据电机转速的不同选择不同的起动方式。若电机在低速大转矩条件下起动,由于起动时需要的电磁转矩较大,采用方波切换正弦波起动,起动时采用方波控制。当转速大于设定阈值时,为保证切换的平稳性,根据计数霍尔周期切换到正弦波控制。正弦波控制转速小于阈值时,判断计数霍尔周期之后重新切换到方波控制。若电机在高速或轻载条件下起动,采用直接正弦波起动方式,以减小转矩脉动。
3.1仿真验证
对于反电动势为正弦波的隐极式无刷直流电机,在矢量控制方式下,电磁转矩Te和交轴电流iq成比例,通过控制交轴电流iq,就能有效控制转矩波动。而在方波控制方式下,不可避免地产生换相转矩脉动,且随着负载增大而增大,影响系统整体控制性能。仿真时,不同负载条件对电机起动性能影响不明显,因此,仿真中给定转速500r/min,负载转矩0.5N·m,转速阈值为100 r/min。图4为方波切换起动方式和直接起动方式下,A相电流和输出电磁转矩波形。
由图可知,两种起动方式都能够实现控制系统正常起动运行。在低速情况下,利用霍尔位置传感器估算的转子位置误差较大,直接起动过程平稳,电磁转矩脉动较小,而方波驱动起动过程中电磁转矩脉动较大。
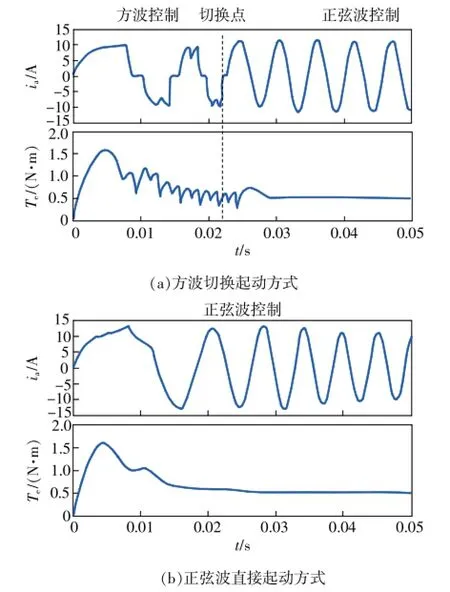
图4 不同起动方式A相电流与电磁转矩

图5 运行时相电流和电磁转矩
图5为稳定运行时矢量控制和方波控制相电流和电磁转矩输出波形。可以看出,反电动势为正弦波时,方波控制和矢量控制相电流与相反电动势同相位,此时可获得最大电磁转矩。方波控制时,相电流在换相时波动明显,并且波动随着负载转矩的增加而增大,相电流波动引起转矩脉动。
3.2实验验证
为验证不同负载转矩时的起动性能,分别对空载、满载条件下的起动性能进行了测试,实验结果如图6、图7所示。图6为空载条件给定转速为500r/min,转速阈值设置为100 r/min(不同电机转速切换阈值不同)在不同起动方式下A相电流波形。方波切换起动时电流波动较大,实际应用中,若电机空载,则直接起动方式为首选。
经实验发现电机在满载条件下转速为500r/min时正弦波直接起动方式电机不能可靠起动,而方波切换正弦波方式电机可以平稳起动。图7为满载条件给定转速为500r/min时,转速阈值设置为100r/min时的方波切换正弦波起动波形。起动开始时采用方波控制,起动阶段电机无抖动,电机起动后,立即检测转速信息,当速度达到切换阈值切换到正弦波控制。由于切换之前,软件中仍然执行电角度和角速度计算,这样保证了切换之后电角度估计值的准确性,切换过程平稳。方波控制时,由于采用两两导通六步换相控制,每时刻有两个开关管导通,相电流为6步阶梯波,矢量控制时,逆变器采用三三导通方式,每时刻有3个开关管导通,相电流为正弦波。
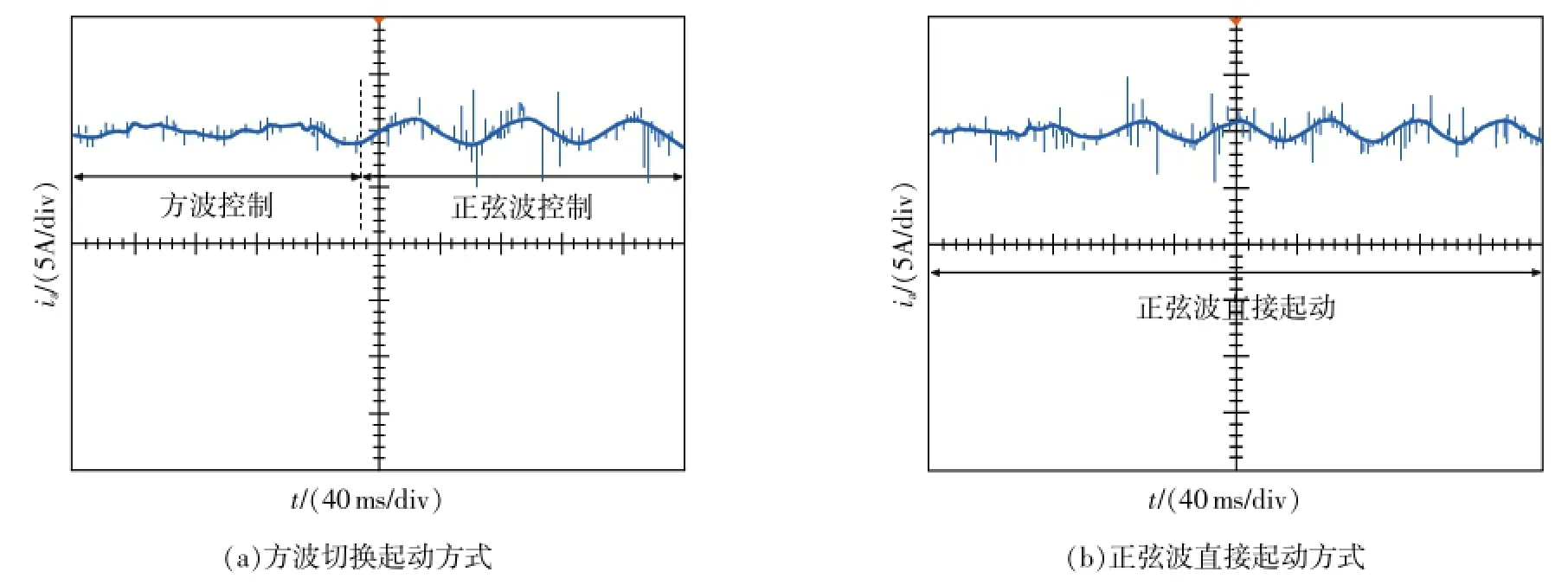
图6 空载时不同起动方式下相电流波形

图7 满载时方波切换正弦波起动波形
4 结束语
本文在分析霍尔位置估算原理的基础上,研究了基于霍尔位置传感器的无刷直流电机方波与正弦波复合控制的电机驱动器,对无刷直流电机矢量控制的起动策略进行了研究,仿真和实验表明在低速大转矩条件下起动时,采用方波切换起动方式较合适,而在高速低转矩条件下起动时,采用直接正弦波起动方式较合适。
[1]夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):26-31.
[2]DALALAZM.Enhanced vector tracking observer for rotor position estimation for PMSM drives with low reso lution Hall-Effect position sensors[C]∥Electric Machines &Drives Conference,Chicago:IEMDC,2013:484-491.
[3]GIACOMO S,GIULIO D D,GIUSEPPE S,et al.Faulttolerant rotor position and velocity estimation using binaryhall-effectsensorsforlow-costvectorcontrol drives[J].IEEE Transactions on Industry Applica-tions,2014,50(5):3403-3413.
[4]ANNO Y,SEUNG K S,DONG C L,et al.Novel speed androtorpositionestimationstrategyusingadual ob server for low-resolution position sensors[J].IEEE Transactions on Power Electronics,2009,24(12):2897-2906.
[5]蔡明,章英,白雪莲,等.线性霍尔传感器技术及其在气动定位控制中的应用 [J].仪表技术与传感器,2013,50 (1):13-15.
[6]周西峰,王严,郭前岗.基于吸d轴法的霍尔位置传感器安装方法研究[J].仪表技术与传感器,2013,50(4):5-7.
[7]SOVA V,CHALUPA J,GREPL R.Fault tolerant BLDC motor controlfor hall sensors failure[C]∥2015 21st International Conference on Automation and Computing,ICAC,2015:1-6.
[8]颜晓鹏,钟汉如.基于霍尔位置传感器的BLDCM控制系统的位置自学习[J].微特电机,2015,43(2):54-57.
[9]MANUELE B,GIUSEPPE B,ROBERTO M.Sinusoidal versus square-wave current supply of PM brushless DC Drives:A convenience analysis[J].IEEE Transactions on Industrial Electronics,2015,62(12):7399-7349.
[10]谭亚丽,郭志大.无刷直流电机方波正弦波符合驱动器设计[J].电气传动,2011,41(6):11-13.
(编辑:李妮)
Starting control strategy of brushless DC motor based on Hall rotor position sensor
XUN Qian1,WU Yong2,WANG Peiliang1,CAI Zhiduan1
(1.School of Engineering,Huzhou University,Huzhou 313000,China;2.British Witten electric Limited by Share Ltd,Suzhou 215000,China)
To solve the problem of instability of Hall signal outputting when the motor is started at a low speed or operating at a very low speed,combining with the advantages of great output under square wave control and small torque ripple and low noise under vector control,a motor driver for square wave and sine wave controlled brushless DC motor based on Hall position sensor is designed.On the basis of analyzing the principle of Hall estimation,the starting strategy of vector control based brushless DC motor applying Hall position sensor is studied and the starting performances of square wave and sine wave controlled brushless DC motor under different load torques are compared.The simulation and experiment show that to ensure the starting stability of motor,direct sine wave starting and square wave and sine wave switching starting can be chosen according to the starting requirements under different circumstances.The starting control strategy researched in this paper has widely extended the application of brushless DC motor under lowspeed and high-torque conditions.
square wave control;vector control;Hall positon sensor;sine wave direct starting;square wave switching sine wave starting
A
1674-5124(2016)08-0118-05
10.11857/j.issn.1674-5124.2016.08.024
2015-10-28;
2015-11-23
国家自然科学基金资助项目(61573137)
湖州市公益性技术应用研究计划项目(2015GZ05)
荀倩(1990-),女,陕西汉中市人,硕士,专业方向为电机控制、电力电子与电力传动。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
四川工商学院学术新视野(2021年2期)2021-11-02 06:17:18
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
电子制作(2019年7期)2019-04-25 13:18:18
电镀与环保(2016年3期)2017-01-20 08:15:29
深圳大学学报(理工版)(2015年5期)2015-02-28 16:21:22
电测与仪表(2014年16期)2014-04-22 05:20:10
电测与仪表(2014年21期)2014-04-04 12:32:08
实验技术与管理(2014年9期)2014-03-11 18:37:38