纯电动汽车的驱动电机系统
2016-09-13 02:33:22北京汇智慧众汽车技术研究院
汽车维修与保养 2016年3期
纯电动汽车的驱动电机系统
驱动电机系统是电动汽车三大核心系统之一,是车辆行驶的主要驱动系统,其特性决定了车辆的主要性能指标,直接影响车辆动力性、经济性和用户驾乘感受。本文将以北汽新能源EV200车型所采用的驱动电机系统为例来介绍相关技术。
一、驱动电机系统介绍
驱动电机系统由驱动电机、驱动电机控制器(MCU)构成,通过高低压线束、冷却管路与整车其他系统连接,如图1所示。
整车控制器(VCU)根据加速踏板、制动踏板、挡位等信号通过CAN网络向电机控制器MCU发送指令,实时调节驱动电机的扭矩输出,以实现整车的怠速、加速、能量回收等功能。
电机控制器能对自身温度、电机的运行温度、转子位置进行实时监测,并把相关信息传递给整车控制器VCU,进而调节水泵和冷却风扇工作,使电机保持在理想温度下工作。
驱动电机技术指标参数,如表1所示,驱动电机控制器技术参数如表2所示。

表1 驱动电机技术参数
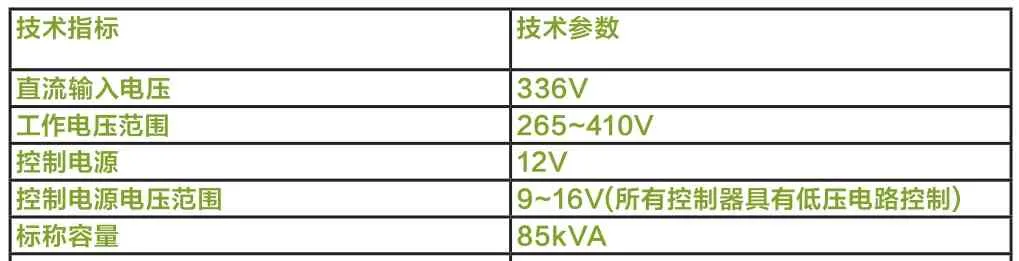
表2 驱动电机控制器技术参数
1.驱动电机
永磁同步电机是一种典型的驱动电机(图2),具有效率高、体积小、可靠性高等优点,是动力系统的执行机构,是电能转化为机械能载体。它依靠内置旋转变压器、温度传感器(图3)来提供电机的工作状态信息,并将电机运行状态信息实时发送给MCU。
旋转变压器检测电机转子位置,经过电机控制器内旋变解码器解码后,电机控制器可获知电机当前转子位置,从而控制相应的IGBT功率管导通,按顺序给定子三个线圈通电,驱动电机旋转。
温度传感器的作用是检测电机绕组温度,并提信息供给MCU,再由MCU通过CAN线传给VCU,进而控制水泵工作、水路循环、冷却电子扇工作,调节电机工作温度。
驱动电机上有一个低压接口和三根高压线(V、U、W)接口,如图4所示。
其中低压接口各端子定义如表3所示,电机控制器也正是通过低压端口获取的电机温度信息和电机转子当前位置信息。

表3 驱动电机低压接口定义
2.驱动电机控制器
驱动电机控制器MCU结构如图5所示,它内部采用三相两电平电压源型逆变器,是驱动电机系统的控制核心,称为智能功率模块,它以IGBT(绝缘栅双极型晶体管)为核心,辅以驱动集成电路、主控集成电路。MCU对所有的输入信号进行处理,并将驱动电机控制系统运行状态信息通过CAN2.0网络发送给整车控制器VCU。驱动电机控制器内含故障诊断电路,当电机出现异常时,达到一定条件后,它将会激活一个错误代码并发送给VCU整车控制器,同时也会储存该故障码和相关数据。
驱动电机控制器主要依靠电流传感器(图6)、电压传感器、温度传感器来进行电机运行状态的监测,根据相应参数进行电压、电流的调整控制以及其它控制功能的完成。电流传感器用于检测电机工作实际电流,包括母线电流、三相交流电流。电压传感器用于检测供给电机控制器工作的实际电压,包括动力电池电压、12V蓄电池电压。温度传感器用于检测电机控制系统的工作温度,包括IGBT模块的温度。
驱动电机控制器上分为低压接口和高压接口(图7),低压接口端子定义如表4所示。

表4 驱动电机控制器低压接口定义
二、驱动电机系统功能
通过驱动电机工作状态可以了解新能源汽车驱动系统的基本功能,根据驾驶员意愿驱动电机的工作状态:挂D挡加速行驶时、减速制动时、挂R挡倒车时以及E挡行驶时来了解它的工作过程。
1.D挡加速行驶
驾驶员挂D挡并踩加速踏板,此时挡位信息和加速信息通过信号线传递给整车控制器VCU,VCU把驾驶员的操作意图通过CAN线传递给驱动电机控制器MCU,再由驱动电机控制器MCU结合旋变传感器信息(转子位置),进而向永磁同步电动机的定子通入三相交流电,三相电流在定子绕组的电阻上产生电压降。由三相交流电产生的旋转电枢磁动势及建立的电枢磁场,一方面切割定子绕组,并在定子绕组中产生感应电动势;另一方面以电磁力拖动转子以同步转速正向旋转。随着加速踏板行程不断加大,电机控制器控制的6个IGBT导通频率上升,电动机的转矩随着电流的增加而增加,因此,起步时基本上拥有最大的转矩。随着电动机转速的增加,电动机的功率也增加,同时电压也随之增加。在电动汽车上,一般要求电动机的输出功率保持恒定,即电动机的输出功率不随转速增加而变化,这要求在电动机转速增加时,电压保持恒定,其中永磁同步电机输出特性曲线如图8所示。
与此同时,电机控制器也会通过电流传感器和电压传感器,感知电机当前功率、消耗电流大小、电压大小,并把这些信息数据通过CAN网络传送给仪表、整车控制器,其具体工作原理如图9所示。
2.R挡倒车时
当驾驶员挂R挡时,驾驶员请求信号发给VCU,再通过CAN线发送给MCU,此时MCU结合当前转子位置(旋变传感器)信息,通过改变IGBT模块改变WVU通电顺序,进而控制电机反转。
3.制动时能量回收
驾驶员松开加速踏板时,电机由于惯性仍在旋转,设车轮转速为V轮、电机转速为V电机,设车轮与电机之间固定传动比为K,当车辆减速时,V轮K<V电机时,电机仍是动力源,随着电机转速下降,当 V轮K>V电机时,此时电机由于被车辆拖动而旋转,此时驱动电动机变为发电机(图10)。
BMS可以根据电池充电特性曲线(充电电流、电压变化曲线与电池容量的关系)和采集电池温度等参数计算出相应的允许最大充电电流。MCU根据电池允许最大充电电流,通过控制IGBT模块,使“发电机”定子线圈旋转磁场角速度与电机转子角速度保持到发电电流不超过允许最大充电电流,以调整发电机向蓄电池充电的电流,同时这也控制了车辆的减速度,具体过程如图11所示。
当踩下制动踏板时,MCU输出的电流频率会急剧下降,馈能电流在MCU的调节下充入高压电池,当IGBT全部关闭时在当前的反拖速度和模式下为最大馈能状态,此时MCU对“发电机”没有实施速度和电流的调整,“发电机”所发的电量全部转移给蓄电池,由于发电机负载较大,此时车辆减速也较快。在此期间能量回收的原则是:①电池包温度低于5℃时,能量不回收;②单体电压在4.05~4.12V时,能量回收6.1kW,单体电压超过4.12V时,能量不回收,低于4.05V时,能量满反馈;③SOC大于95%、车速低于30km/h 时没有能量回收功能,且能量回收及辅助制动力大小与车速和制动踏板行程相关。
4.E挡行驶时
E挡为能量回收挡,在车辆正常行驶时E挡与D挡的根本区别在于MCU和VCU内部程序、控制策略不同。在加速行驶时E挡相对于D挡来说提速较为平缓,蓄电池放电电流也较为平缓,目的是尽可能节省电量以延长行驶距离,而D挡提速较为灵敏,响应较快。在松开加速踏板时,E挡更注重于能量回收,驱动电机被车轮反拖发电时所需的“机械能”牵制了车辆的滑行,从而也起到了一定的制动效果,所以E挡行车时车辆的滑行距离比D挡短。
(供稿:北京汇智慧众汽车技术研究院)
北京汇智慧众汽车技术研究院作为中国新能源汽车职业教育先行者,率先在国内推广新能源汽车职业教育,并开展职业院校师资培训。2105年该院与北京新能源汽车股份有限公司达成职业教育战略合作关系,其后与多家汽车检测设备和教具开发公司合作成立新能源汽车教学课程体系开发联盟,响应国家新能源战略发展计划,常年开设新能源技术多媒体培训班向广大师生传授、分享电动车技术知识及经验。
猜你喜欢
车主之友(2022年6期)2023-01-30 07:58:16
汽车实用技术(2022年7期)2022-04-20 11:45:04
防爆电机(2021年4期)2021-07-28 07:42:56
上海大中型电机(2021年2期)2021-07-21 03:01:32
房地产导刊(2020年11期)2020-12-28 01:32:30
黄河之声(2019年23期)2019-12-17 19:08:43
铁道通信信号(2019年4期)2019-10-10 03:42:56
汽车实用技术(2019年17期)2019-09-21 03:46:32
黄河之声(2017年13期)2017-01-28 13:30:17
通信电源技术(2016年1期)2016-04-16 04:57:31