
基于UG的四连杆机构平移式侧舱门设计
2016-09-13 07:58:30吴东安徽安凯汽车股份有限公司合肥230051
客车技术与研究 2016年4期
吴东(安徽安凯汽车股份有限公司,合肥 230051)
基于UG的四连杆机构平移式侧舱门设计
吴东
(安徽安凯汽车股份有限公司,合肥230051)
介绍通过UG NX8.0软件进行客车四连杆机构平移式侧舱门设计的过程,并基于UG NX8.0软件的运动仿真功能,校核分析四连杆机构平移式侧舱门的运动状态,提高设计效率。
客车;平移式舱门;四连杆机构;仿真设计
随着客车数量的不断增加,客运站内停车的空间越来越狭小,在有限的空间内就会出现存取行李时,上掀式侧舱门无法完全开启的现象,给乘客造成不便。因而客户在购买客车时会逐渐倾向于选择开启时占用空间小的平移式侧舱门的车型。同时,四连杆机构平移式侧舱门具有工作可靠、结构简单、开关速度快等优点[1]。
1 平移式侧舱门的结构及工作原理
1)平移式侧舱门的结构。客车平移式侧舱门结构如图1所示,由侧舱门、轴承座、转轴、弯臂、主动轴、下平衡杆、气弹簧、门锁等组成。为了便于安装调整,转轴、弯臂、下平衡杆通常设计带有30~40 mm螺纹,转轴支座、下平衡杆支座设计成长孔结构[2]。
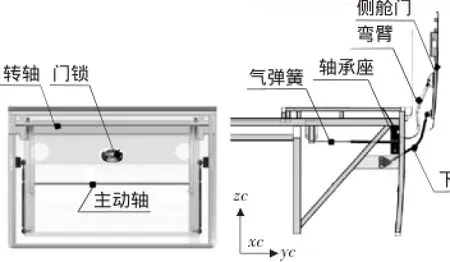
图1 四连杆机构平移式侧舱门结构
2)平移式侧舱门工作原理。四连杆机构平移式侧舱门是以气弹簧为动力源,通过外力的作用使转轴发生转动,实现舱门的开启和关闭。舱门关闭时,在气弹簧力和舱门总成重力的作用下产生负力矩,使舱门处于自锁状态[3],同时压紧密封条,并通过锁机锁住舱门;舱门开启时,通过外力拉动舱门,当转轴转过一定角度后,气弹簧产生的转动力矩大于侧舱门和四连杆机构的自重产生的力矩,侧舱门自动上升,直到气弹簧达到最大工作行程。
2 基于UG的平移式侧舱门设计
2.1侧舱门门板及骨架设计
在UGNX8.0软件中,产品建模可以采用从底向上设计方式或自顶向下设计方式。本文选用自顶向下设计方式。首先新建一个装配部件,将车架、侧围骨架及外蒙皮组件添加到部件中,然后利用上述已有组件,在装配部件中建立几何体,最后将几何体添加到创建的组件中。侧舱门建模的具体步骤为:首先根据车身断面绘制舱门门板截面弧度线,根据侧围骨架中裙立柱位置确定舱门门板长度,使用拉伸命令完成舱门门板片体设计。在设计过程中,为保证舱门打开过程中不与其它部件或舱门干涉,设计时舱门上方与车身外蒙皮预留6~8 mm间隙,两舱门之间预留5 mm间隙。其次是锁体拉手安装孔以及侧标志灯安装孔设计,侧标志灯安装孔按照GB4785-2007[4]及整车布置的要求进行开设。在三维数模中以拉手安装孔中心点创建与门板相切的草图平面,进入草图环境绘制拉手安装孔,退出草图后使用修剪片体命令完成安装孔的设计,最后对片体加厚处理形成实体。设计时拉手安装孔的高度通常布置在侧舱门的中部偏上位置。如果拉手高度太低,则会造成在侧舱门开启的瞬间,出现舱门下沿先打开、上沿后打开的现象,造成舱门开启困难。
侧舱门骨架分为两类,即安装梁和加强筋。安装梁包括安装弯臂支座、下平衡杆支座等使用的型材,一般采用40×30×2铝材。弯臂安装梁的位置可根据弯臂的间距及外形大致确定一个位置,最后再根据四连杆机构尺寸最终确定;而下平衡杆支座的安装梁的位置需要考虑关门时,下平衡杆不能与舱门两侧密封胶条干涉,一般距离门板边缘80~110 mm。在遵循轻量化原则的基础上,加强筋可以灵活使用,也可使用板材折弯,尽量做到布局整齐、美观、实用。根据以上原则对侧舱门骨架建模,创建时首先以舱门门板为参考,对门板的竖直边使用抽取命令获得边曲线,再以该曲线通过变化扫掠命令绘制型材截面并完成扫掠,最后对扫掠体修剪,完成一安装梁建模。通过同样方法可以获得其它安装梁和加强筋的建模。完成后将创建的建模几何体添加到侧舱门组件中,这样,在UGNX8.0软件中创建的侧舱门门板及骨架三维数模如图2所示。

图2 侧舱门门板及骨架
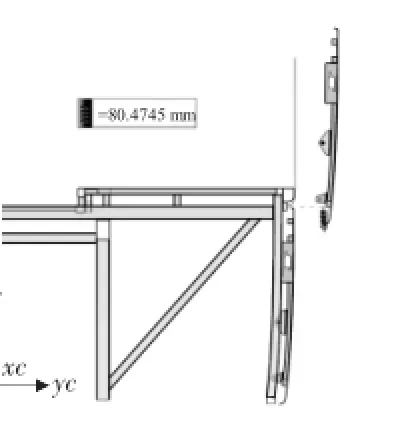
图3 侧舱门最大举升高度
2.2四连杆机构的确定
1)确定最大举升高度。理想的举升高度是等于门体本身在z方向的总高(H)[5],即侧舱门在开启位置时,需保证舱门的下边缘与关闭时的上边缘相平齐,最大举升高度等于H。考虑到舱门举升太高,不方便关闭,通常最大举升高度略低于侧舱门上沿50~100 mm,本文中取低于侧舱门上沿80 mm。在UGNX8.0软件中通过移动组件命令复制一个侧舱门,并将复制的侧舱门移动到所需开启位置,如图3所示。
2)确定转轴、主动轴及下平衡杆的位置。如图4所示,在侧舱门中确定弯臂支座中心点O1的位置及下平衡杆在舱门上O2的位置,O1点一般设计在侧舱门的中心附近,O2点则尽量设计在舱门的最下端。以O1点建立一yz平面,当侧舱门被举升到最大高度位置时,侧舱门上的O1、O2两点也相应地移动到O1'、O2'点,连接O1O1'、O2O2',并将O2O2'线投影到yz平面上。在yz平面作O1O1'、O2O2'的垂直平分线k和m,并在k上取一点O3作为转轴的固定点。在结构允许的情况下,O3尽可能地靠近侧围蒙皮外表面,从而避免在侧舱门刚开启时其上边缘尽可能地水平移出,减少门缝间隙。连接O1O3,O1O3的长度便是弯臂的回转半径R。过O4'点做平行于O1O3的平行线n,线m与n的交点O4,即为下平衡杆固定支座的轴点,连接O3O4,则为四连杆机构的机架[6];一般下平衡杆的回转半径R1要求比转轴的回转半径R略大,R1通常≈1.05~1.1R。根据绘制的四连杆机构结构依次建模转轴、主动轴、弯臂、下平衡杆、轴承座等四连杆机构组件。
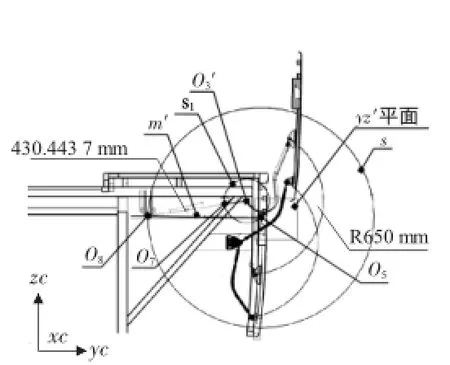
图5 气弹簧的三维数模及安装位置
2.3气弹簧相关参数的确定
通常气弹簧初选时公称压力可定为侧舱门自重的3倍左右、总长可定为侧舱门总高的70%左右,本文侧舱门重量为15 kg、高度为880 mm,所以选择公称压力为45 kg、总长为650 mm的气弹簧两根。然后在UG NX8.0软件中,根据侧舱门举升高度、安装位置及自锁角要求,确定气弹簧规格及铰支点位置[7],如图5所示。具体步骤为:在侧舱门最大举升高度状态,以任一弯臂中心轴线创建yz'平面,在yz'平面中设定O5点作为气弹簧在弯臂上的安装点,以O5点为圆心、气弹簧总长为半径绘制圆S;再将转轴固定点O3点投影到yz'平面,得到O3'点,以O3'点为圆心,O3'O5为半径绘制圆S1。过O5点作一条与水平面夹角为2°的直线m',直线m'与圆S的交点即为气弹簧的另一安装点O6。连接O3'O6,与圆S1相交于O7点,O6O7点之间距离为气弹簧的最短距离L短,经测量L短=430 mm。根据得出气弹簧的mm,结合厂家现有气弹簧规格,选择L有效行程为270 mm。
最终确定气弹簧基本参数:等级为A级;气缸外径为22 mm;活塞杆外径为10 mm;总长650 mm;有效行程为270 mm;公称力为450 N;气弹簧规格为YQ10/22 -270-650(B-B)-450 N。考虑到舱门在运动过程中气弹簧的活塞杆与压力管存在相对运动,为了便于运动过程仿真校核,在设计时将活塞杆与压力管作为两个组件分开建模,长度各按270+55 mm(55 mm为厂家给定气弹簧单端最短工艺长度),通过接触对齐约束装配到部件中。
3 运动过程及受力分析
3.1在UG NX8.0软件中运动过程仿真校核
对建模好的各组件进行装配约束,首先对底架和侧围骨架使用固定约束,然后使用接触对齐约束、距离约束以及中心约束等约束类型对各组件约束,最终使轴承座处于完全约束状态,侧舱门、转轴、弯臂、主动轴、气弹簧、下平衡杆处于部分约束状态。在UGNX8.0软件中使用移动组件命令,选择转轴作为移动组件,变换选用动态选项,按zc轴旋转,旋转角度设置为132°(最大举升高度位置),捕捉设为2,动画步骤参数设为300(动画步骤数值越大,动画越慢),回车后观察侧舱门开启动画效果及结束位置,再将旋转角度设置为-132°,即可观察关闭动画效果。也可通过设置不同旋转角度值,观察舱门运动过程中的瞬间位置,检查各组件是否存在干涉现象。
经校核,本舱门在开启以及关闭的运动过程中,各部件之间无干涉现象,说明该四连杆机构在尺寸参数设计上合理。图6所示为其开启水平状态。
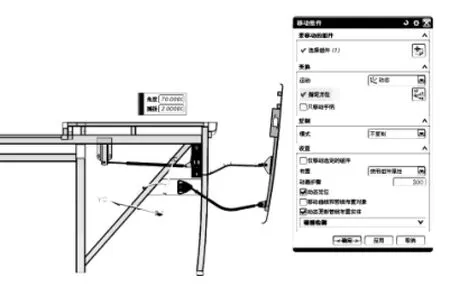
图6 舱门水平状态
3.2受力分析
由于在UG NX8.0软件中只能模拟出舱门运动轨迹,无法验证在某一力矩下,舱门是否能够被顺利举升或关闭,所以四连杆机构经UGNX8.0仿真校核确定相关参数后,还需要结合工程力学对侧舱门机构进行受力分析和计算,从而确认侧舱门开启时的举升力矩和关闭时自锁力矩是否合理。
四连杆机构的侧舱门受力非常复杂,为了便于分析,在计算中通常将侧舱门及四连杆机构分别看作一个质点,质心通过其中心,其重量分别用G1、G2代替[9]。在分析中忽略下平衡杆的重力和摩擦力。这样,侧舱门所受的转动力矩有侧舱门自身重量产生的转矩M1、四连杆机构重量产生的转矩M2和气弹簧举升力产生的转矩M3,整个系统所受到举升转矩为M=M3-C×(M1+M2),公式中C为修正参数,C通常取1.2~1.4。为保证侧舱门的正常开启,举升转矩M>0。
由于弯臂转到为水平位置时,阻力矩M1和M2最大[10],此时要求举升转矩M>0。通过测量三维数模中的各力力臂,计算出举升转矩M=M3-C×(M1+M2)=900× 0.12-1.2×(150×0.49+40×0.18)=11.16 N·m>0(式中C 取1.2),能保证侧舱门的正常开启。
当侧舱门关闭时,还应产生一个自锁力矩,使得侧舱门在关闭状态下紧闭,不会自动弹开。一般自锁力矩设计在30~60 N·m之间,同样通过计算可以得出M自锁=M1+M3=150×0.095+900×0.04=50.25 N·m。
4 结束语
运用UGNX8.0软件设计的四连杆机构平移式侧舱门,通过UG运动仿真功能可直观地观测舱门的运动过程。在设计过程中能够及时发现各运动部件是否存在干涉现象,并可验证各部件是否合适,避免出现二维设计中的不足。用此方法设计的舱门已研制出样品并量产。
[1]陈永军.客车侧舱门铰链浅析[J].客车技术与研究,2004,26 (4):25-27.
[2]李小龙.YCK6938H型客车平移式行李舱门四连杆机构的设计[J].客车技术与研究,2004,26(3):24-25.
[3]公安部道路交通管理标准化技术委员会.机动车运行安全技术条件:GB7258-2012[S].北京:中国标准出版社,2012:5.
[4]全国汽车标准化技术委员会.汽车及挂车外部照明和光信号装置的安装规定:GB 4785-2007[S].北京:中国标准出版社,2007:11.
[5]文广南.客车行李舱门四连杆机构的探讨[J].客车技术与研究,2003,25(3):21-24.
[6]李树军.机械原理[M].北京:机械工业出版社,2000:8-75.
[7]宁水根,黄键,张勇,等.客车外摆式行李舱门四连杆机构设计[J].汽车工程师,2012(2):22-24.
[8]文广南.气弹簧撑杆的安装研究[J].客车技术与研究,2005,27(4):20-21.
[9]沈中华.平移式后发动机舱门四连杆机构的设计及附件选择[J].客车技术与研究,2007,29(3):32-34.
[10]陈成立.平移摆式行李舱门四连杆机构的设计[J].客车技术与研究,1999,21(1):16-19.
修改稿日期:2016-03-05
Design of Translational Hatch Door with Four-link Mechanism Based on UG
Wu Dong
(Anhui Ankai Automobile Co.,Ltd,Hefei 230051,China)
The author introduces the process of translational hatch door design with four-link mechanism for bus/ coach by UG NX8.0 software,checks and analyzes the movement state of the translational hatch door with four-link mechanismbased on the motion simulation function ofUGNX8.0 software.This can improve the design efficiency.
bus/coach;translational hatch door;four-link mechanis;simulation and design
U463.83+4
B
1006-3331(2016)04-0036-03
吴东(1975-),男,工程师;研究方向:客车车身结构及附件。
猜你喜欢
工程技术与管理(2021年13期)2021-08-23 01:17:10
科学与信息化(2021年20期)2021-08-05 02:59:40
上海大中型电机(2021年1期)2021-06-09 09:12:06
民用飞机设计与研究(2020年4期)2021-01-21 09:15:22
机械工程师(2020年5期)2020-06-19 08:07:06
民用飞机设计与研究(2019年2期)2019-08-05 01:33:44
民用飞机设计与研究(2019年4期)2019-05-21 07:21:36
山东冶金(2019年2期)2019-05-11 09:12:24
凿岩机械气动工具(2017年3期)2017-11-22 07:21:43
电脑爱好者(2016年23期)2017-01-05 20:39:51
