
在役螺栓轴力电磁超声测量系统的研制
2016-09-12 09:17武新军
无损检测 2016年6期
丁 旭,武新军
(华中科技大学 机械科学与工程学院, 武汉 430074)
在役螺栓轴力电磁超声测量系统的研制
丁旭,武新军
(华中科技大学 机械科学与工程学院, 武汉 430074)
为解决在役螺栓轴力测量的技术难题,根据基于波型转换的单传感器螺栓轴力超声测量原理,研制出一套在役螺栓轴力电磁超声测量系统。详细介绍了电磁超声探头、主机和测量软件等系统的组成部分。实验室和现场试验证明,该系统能够用于在役螺栓轴力测量,测量相对误差不超过10%。该系统采用电磁超声非接触耦合,避免了耦合剂影响,测量结果具有良好的稳定性,为螺栓轴力控制提供了一种新的技术手段。
在役螺栓;轴力测量;电磁超声
螺栓作为一种结构简单,拆装方便的固定连接结构,在桥梁[1-2]、石化[3]等大型基础设施和成套设备中大量使用。螺栓连接一旦发生失效,会造成结构失稳,甚至引发灾难性事故。螺栓连接的可靠性取决于螺栓的轴向预紧力(简称轴力)是否恰当。不恰当的轴力会导致螺母松脱或者螺栓断裂,而使得螺栓连接提前失效。因此准确测量螺栓轴力,能够有效提高螺栓连接可靠性和结构安全性。
目前工程中普遍使用的扭矩法和转角法,只能在螺栓安装时对轴力进行控制,不能用于在役螺栓轴力的测量,并且误差较大,实际轴力偏差甚至达到目标轴力的20%以上[4]。基于声弹性效应的螺栓轴力超声测量技术是一种低成本、快速、无损的螺栓轴力测量方法。该技术自出现以来,就受到国内外学者的广泛关注[5-7]。国内已经有用于桥梁螺栓和法兰螺栓的轴力测量系统研制的相关报道[8-9]。但是这些系统多采用压电超声换能器,难以控制耦合剂厚度而使得其受限于工程应用。而电磁超声换能器是一种使用电磁场在试件表面直接产生超声波的非接触换能器[10],笔者根据基于波型转换的单传感器螺栓轴力超声测量原理,研制了一套在役螺栓轴力电磁超声测量系统,系统采用电磁超声非接触耦合,避免了耦合剂的影响,并进行了实验室和现场测试。
1 检测原理
在役螺栓轴力可以通过测量螺栓轴向应力获得,螺栓轴向应力可通过螺栓中声弹性效应产生的声速变化进行测量。电磁超声探头在螺栓端面激励出与端面法线成微小夹角的横波。横波在另一端面反射,发生波型转换,产生一束横波和一束纵波被超声探头接收。超声波在螺栓中的传播路径如图1所示,其中螺栓被简化为理想圆柱体;图中,S1为入射横波传播路径,S2为反射横波传播路径,S3为反射纵波传播路径,α为入射横波发射角,θS为入射横波入射角,γS为反射横波反射角,γL为反射纵波反射角。根据声弹性理论,螺栓中的纵波和横波声速均会随着应力大小变化而变化,其表达式为:
(1)
(2)

图1 超声波(发生波型转换)在螺栓中的传播路径
式中:vL和vS分别为纵波和横波的声速;下标0和σ分别代表无应力状态和加载应力状态;σ为螺栓的轴向拉应力;CL和CS分别为螺栓材料的纵波和横波声弹性常数。
由于横波与轴线的夹角非常小,可以将超声波的传播路径近似视为沿轴线传播。因此探头接收到的横波和纵波信号的声时分别为:
(3)
(4)
式中:L为螺栓长度。
计算纵波声时和横波声时的比,进行泰勒展开,并取一阶泰勒级数作为近似,有:
(5)
根据式(5)可知,纵波信号和横波信号的声时比与轴向应力大小成线性关系。在测量前对无应力螺栓纵横波声速比和纵横波声弹性常数进行标定,在现场只需要测量在役螺栓的声时比就可以计算出螺栓的轴向应力大小,进而确定螺栓轴力。
2 检测系统构成
根据上述检测原理研制出的螺栓轴力电磁超声测量系统的系统框图和实物照片,如图2所示。其主要由主机、电磁超声探头和便携计算机组成。该系统的主要测量对象为M24~M30钢制螺栓;可测量的螺栓最大长度为200 mm;相对测量误差不超过10%。

图2 螺栓轴力电磁超声测量系统框图和实物照片
2.1主机
主机是测量系统的核心,其各模块都有自身特殊的功能要求。控制模块要求能够根据计算机指令产生各控制信号,并且各信号遵循严格的时序关系。其中,脉冲信号的各项参数需准确、可控。门控功率放大模块要求能够以较低功耗实现兆赫兹频率脉冲的大功率、低失真放大。弱信号接收模块要求能够将微弱的高频电磁超声信号放大至数据采集卡能够分辨的程度,并且能够承受激励时的高冲击电压。
控制模块负责接收计算机指令,产生脉冲信号、采集触发信号和接收控制信号,同时还负责对门控功率放大模块报警信号的监控和响应。由于控制模块任务较多,并且对实时性有较高要求,因此采用以FPGA (Field-programmable gate array,现场可编程门阵列) 芯片为核心的设计。FPGA芯片内搭建了多个时序逻辑电路分别处理控制模块的各项功能。所有的时序逻辑电路均工作在100 MHz时钟下,具有纳秒级的响应速度。各时序逻辑电路通过一组寄存器进行控制,寄存器的值由计算机指令进行更改。脉冲信号为单音脉冲,要求脉冲频率和周期数均可调。因此设计了基于DDS (Direct digital synthesis, 直接数字合成)技术的脉冲信号合成器。DDS的数字部分采用FPGA芯片实现,驱动独立的数模转换电路产生期望的单音脉冲信号。信号最高频率可达12.5 MHz,频率调节步进12 Hz,周期数可调范围为1~255。
为满足仪器便携性的要求,功率放大模块的体积和重量均受到限制,不能布置大量散热片,因此要求功率放大模块具有很低的功率损耗以降低发热。螺栓轴力电磁超声测量系统工作时,90%以上的时间在等待回波信号,产生激励脉冲的时间非常短。针对这一特性,设计了门控AB类功率放大电路以实现低功耗的大功率低失真放大。AB类放大电路本身具有效率高、失真小的特点,能够满足脉冲信号功率放大的需要。门控电路在激励脉冲放大结束后将放大电路的静态工作点调至截止区,进一步降低功率放大电路的功耗。为实现兆赫兹信号功率放大,门控功率放大模块采用响应特性好的场效应晶体管作为功率元件,并使用传输线变压器作为输出变压器,最终实现向50 Ω负载输出频率2.5 MHz,峰值电压800 V的单音脉冲的目标。
电磁超声激励时会在接收线圈上产生一个高电压脉冲。为避免弱信号接收模块在高电压脉冲冲击下进入阻塞状态,在输入端设计了电压阈值网络,将高于阈值的信号旁路,以保障后续电路正常工作。根据被测螺栓规格的不同,电磁超声信号幅值变化范围较大,并包含大量干扰信号。为最大程度地提高信号信噪比,弱信号接收模块在设计中采取了以下措施:① 采用可变增益放大器和固定增压放大器搭配的设计,在提供高增益的同时将超声信号幅值始终控制在数据采集卡的最佳范围。② 设计高阶带通滤波器,滤除信号中的噪声。③ 对弱信号接收模块电源进行滤波抑噪声设计,降低电源噪声干扰。
电磁超声信号需要重复采样,取平均值以尽量消除噪声影响。为此,数据采集卡支持数字信号触发并具有稳定的触发响应时间,以保证每次激励的信号采集开始时刻一致。
为保障测量系统的便携性,采用USB接口实现主机和便携计算机的指令与数据通信。
2.2电磁超声探头
电磁超声探头由磁化器和线圈两大部分组成。磁化器用于产生方向不同的偏置磁场,以激励和接收不同波型的超声波。根据基于波型转换的螺栓轴力测量原理,电磁超声探头需要产生倾斜入射的横波,并且能够同时接收横波和纵波信号,因此电磁超声探头采用了垂直磁化的圆柱永久磁铁作为磁化器。在圆柱磁铁覆盖区域的偏置磁场垂直于试件表面,能够产生和接收横波信号。在圆柱磁铁边缘的偏置磁场平行于试件表面,能够用于接收纵波信号。线圈使用螺旋线平面线圈,以便满足同时接收纵波和横波信号的要求。
圆柱磁铁直径是电磁超声探头的重要参数,直接影响探头的性能。较大的直径能够提高横波激励和接收的效率,但是会削弱波型转换纵波信号的接收效率。较小的直径能提高波型转换纵波信号的接收效率,但是会降低横波的激励效率。由于纵波是通过波型转换由横波反射中产生的,横波激励的减弱也可能导致纵波信号幅值下降。因此在设计时,需要对横波激励效率和纵波接收效率进行平衡,确定合适的磁铁直径以获得最佳的信号幅值。通过大量试验,确定了最佳的圆柱磁铁直径,设计制作了螺栓轴力电磁超声测量探头,其实物图片如图3所示。

图3 螺栓轴力电磁超声测量探头
2.3测量软件
电磁超声轴力测量软件基于便携式PC计算机,使用C++语言和Matlab联合开发,其总体框图如图4所示。

图4 测量软件的总体框图
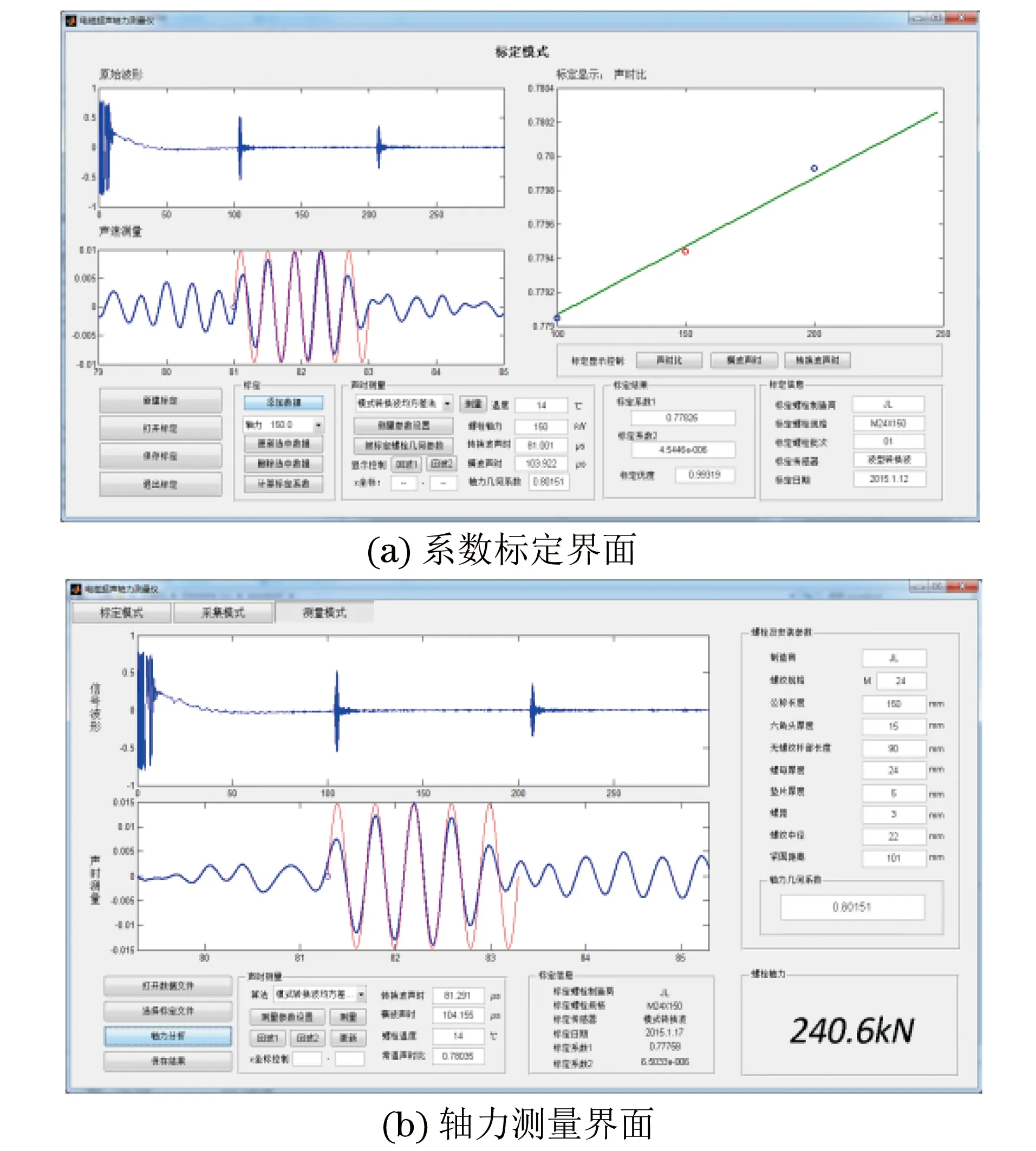
图5 螺栓轴力测量软件界面
根据螺栓轴力测量的需求,轴力测量软件分为信号采集、系数标定和轴力测量三大功能模块,实现的主要功能有:主机参数设置、数据采集控制、数据读取存储与显示、声时测量、轴力测量系数计算和轴力计算等。主机参数设置包括对控制模块和数据采集卡的参数进行设置,包括激励脉冲波形参数、功率放大参数、弱信号放大和滤波参数、采集范围和频率参数等。数据采集控制负责数据采集卡的启动和停止。数据读取存储及显示功能负责数据采集卡采集数据的显示以及数据文件的读取和保存。声时测量功能对采集到的超声数据进行处理,从信号中提取出波型转换纵波和横波信号的声时。轴力测量系数计算功能通过对螺栓声时数据以及对应的螺栓轴力数据进行处理,标定无应力螺栓纵横波声速比和纵横波声弹性常数等螺栓轴力测量系数。轴力计算功能根据标定获得的螺栓轴力测量系数和被测螺栓声时,计算准确的螺栓轴力大小。螺栓轴力测量软件中系数标定模块和轴力测量模块的软件界面如图5所示。
3 实验室和现场试验
3.1实验室试验
为验证螺栓轴力电磁超声测量系统的性能,在实验室内使用螺栓轴力加载实验台进行加载,使用研制的系统测量螺栓轴力。被测螺栓规格为GB/T 1228 M24×150 -10.9 S。
首先在被测螺栓中随机选取5颗螺栓进行标定试验,测量被标定螺栓以25 kN为步进从0 kN轴力到250 kN轴力下的波型转换纵波声时和横波声时。图6为M24螺栓上的电磁超声信号波形。
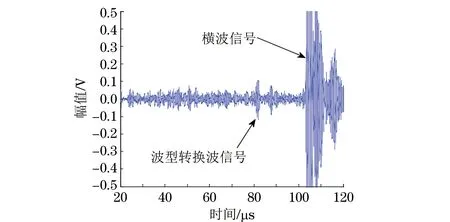
图6 M24螺栓的电磁超声信号波形
根据测量的声时结果,采用线性回归方法得到波型转换纵波-横波声时比与轴力的关系。综合5颗螺栓的标定结果,得到M24×150 mm螺栓声时比T1-3/T1-2与轴力F的关系如下:
(6)
获得标定系数后,另取10颗螺栓将其轴力加载至250kN后进行轴力测量,结果如表1所示。将螺栓轴力加载实验台的轴力示数视为真值,计算电磁超声轴力测量的相对误差。由于螺栓轴力加载实验台的加载方式为人工施拧,因此轴力示数无法准确地控制在250 kN,存在一定偏差。10颗螺栓中,轴力超声测量的最大相对误差为5.3%,最小相对误差为-0.7%。

表1 实验室环境下螺栓GB/T 1228 M24×150的轴力测量结果
3.2现场试验
为检验螺栓轴力电磁超声测量系统的测量能力,在广东省珠海市的横琴二桥工地进行了现场试验。测量对象为施工方为验证螺栓安装工艺而制作的大桥某结点处上弦顶板的1∶1实物模型,现场试验布置及上弦顶板模型尺寸分别如图7,8所示。针对现场工况,使用压力环测量螺栓的真实轴力。上弦顶板1∶1实物模型上使用扭矩法安装了70颗性能等级为10.9S的M30钢结构高强度大六角头螺栓,其中20颗螺栓安装了压力环。使用螺栓轴力电磁超声测量系统对这20颗螺栓的轴力进行了测量,并将测量结果与压力环的读数进行了对比。

图7 现场试验布置示意

图8 上弦顶板模型尺寸示意
安装了压力环的螺栓规格为GB/T 1228 M30×190-10.9 S,紧固距离为142 mm。使用同规格螺栓在实验室进行标定试验,得到轴力和波型转换纵波-横波声时比的关系为:
(7)
根据标定试验得到的测量常数和现场测量的声时比,得到20颗螺栓的测量结果,见表2。将压力环读数视为螺栓轴力真值,计算轴力超声测量相对误差。结果表明,在现场环境下,螺栓轴力电磁超声测量系统的相对测量误差不大于10%。

表2 现场条件下螺栓GB/T 1228 M30×190的轴力测量结果
4 结论
根据基于波型转换的单传感器螺栓轴力测量原理,研制了在役螺栓轴力电磁超声测量系统,能够用于规格为M24~M30的螺栓轴力测量。通过实验室和现场的试验,表明该系统的轴力测量相对误差不大于10%。该系统使用电磁超声换能器,避免了耦合剂厚度对螺栓轴力测量的影响,提高了测量结果的稳定性,利于其在工程现场的应用。
[1]汤生虎,陈爱东,许成明,等.重庆朝天门长江大桥高强度螺栓试验研究[J].中国港湾建设,2012(2):25-30.
[2]吴兴红. 南京大胜关长江大桥高强度螺栓试验概述[J]. 铁道建筑, 2010(3): 1-3.
[3]陆晓峰, 顾伯勤, 涂善东. 高温螺栓法兰连接研究进展[J]. 压力容器, 2004, 21(12): 34-42.
[4]初泰安. 螺栓拧紧方法及预紧力控制[J]. 石化技术, 2005, 11(3): 42-45.
[5]JOHNSON G C, HOLT A C, CUNNINGHAM B. Ultrasonic method for determining axial stress in bolts[J]. Journal of Testing & Evaluation, 1986, 14(5): 253-259.
[6]CHAKI S, CORNELOUP G, LILLAMAND I, et al. Combination of longitudinal and transverse ultrasonic waves for in situ control of the tightening of bolts[J]. J Press Vess-T ASME, 2007, 129(3): 383-390.
[7]杜刚民, 李东风, 曹树林, 等. 螺栓轴向应力超声测量技术[J]. 无损检测, 2006, 28(1): 20-22.
[8]何存富,吴克成,石建中,等.大桥螺栓施拧轴力的超声测量[J].实验力学,1994,9(1):74-78.
[9]朱士明, 肖明正,卢杰, 等. 超声波高温螺栓应力监测仪的研制[J]. 同济大学学报:自然科学版, 1991, 19(4): 433-439.
[10]HIRAO M, OGI H. Emats for science and industry[M]. Dordrecht: Kluwer Academic Publishers, 2003:245-260.
Development of EMAT Based Axial Load Measurement System for In-service Bolts
DING Xu, WU Xin-jun
(School of Mechanical Science and Engineering, Huazhong University of Science and Technology, Wuhan 430074, China)
To solve the technical problems of the axial load measurement of in-service bolts, the measurement system for the axial load of in-service bolts using the electromagnetic acoustic transducers is developed according to the principle of axial load measurement based on mode conversion. It consists of electromagnetic acoustic transducer, host, and software. Laboratory and field experiments indicated that the system could be used in axial load measurement of in-service bolts and the measuring relative error was less than 10%. The advantage of the system is that the electromagnetic acoustic transduction is adopted to obtain the good stability and to avoid the effect of couplant in the traditional piezoelectric transduction. In the meanwhile, a new technical means for the bolt axial load control is also provided.
In-service bolt; Axial load measurement; Electromagnetic acoustic transducer
2015-11-03
国家重大科学仪器设备开发专项资助项目 (2012YQ09017502)
丁旭(1985-),男,博士研究生,研究方向为电磁超声无损检测技术。
武新军(1971-),男,教授,博士生导师,主要研究方向为无损检测新技术,E-mail: xinjunwu@mail.hust.edu.cn。
10.11973/wsjc201606012
TG115.28
A
1000-6656(2016)06-0048-05
猜你喜欢
铁道建筑技术(2022年10期)2022-10-28
建材发展导向(2022年18期)2022-09-22
矿产与地质(2022年2期)2022-09-06
北京大学学报(自然科学版)(2022年2期)2022-04-08
建材发展导向(2021年19期)2021-12-06
水道港口(2020年2期)2020-06-08
铁道勘察(2016年3期)2016-08-01
陶瓷学报(2015年4期)2015-12-17
浙江大学学报(工学版)(2015年6期)2015-03-01
传奇故事(破茧成蝶)(2015年6期)2015-02-28
