
基于PI-PLL的船舶电力推进SVM-DTC系统仿真研究
2016-09-12 02:35张丽春
电子设计工程 2016年4期
张丽春
(江苏科技大学 电子信息学院,江苏 镇江 212003)
基于PI-PLL的船舶电力推进SVM-DTC系统仿真研究
张丽春
(江苏科技大学 电子信息学院,江苏 镇江 212003)
针对船舶电力推进直接转矩控制(DTC)系统定子磁链的观测值并不准确的问题,文中引入空间矢量脉宽调剂技术(SVPWM)来降低电流及转矩的脉动,并且固定了开关频率。同时采用基于PI锁相环的定子磁链观测器代替常用的电压-电流模型的方法,结合直接转矩控制、空间矢量脉宽调剂技术以及船桨模型,建立基于PI-PLL磁链观测器的SVM-DTC系统仿真模型,仿真结果表明,定子磁链观测的精度大幅提高,系统的性能有所改善。
船舶电力推进;DTC;空间矢量脉宽调剂技术;PI锁相环;磁链观测器
在船舶电力推进SVM-DTC系统中,定子磁链是至关重要的参数。对于基于空间矢量脉宽调制技术的船舶电力推进直接转矩控制系统,定子磁链的误差将会影响电磁转矩、参考电压和逆变作用时间的计算,从而影响生成的PWM脉冲,影响系统的控制效果。
针对定子磁链的观测精度和响应速度,国内外学者主要在两方面研究改进[1]:
由于传统电压-电流模型受定子电阻的影响,所以可以通过在线辨识定子电阻的方法,提高定子磁链观测的准确性。但是这样增加了系统的复杂性。
由于电压-电流模型采用纯积分器方法实现,会使积分结果偏移甚至饱和从而影响观测精度,所以有学者提出用一阶低通滤波器代替原始纯积分环节,但是滤波器的引入使定子磁链的幅值和相位都受影响,尤其在低速时影响更为严重。
为了解决这些问题,查阅相关文献,其中给出了一种基于锁相环的定子磁链观测模型,结构简单且具有较好的零飘抑制作用,观测结果几乎没有延迟,对输入电压噪声抑制作用较强。但是这种磁链观测器用除法器作为速度跟踪调节器,存在些不稳定因素,尤其在低速时磁链观测器响应较慢。因此,文中将基于PI-PLL的磁链观测器应用于船舶电力推进SVM-DTC系统中取代传统的U-I磁链观测模型,观察新的磁链观测器的精度以及对系统速度、转矩和电流的影响。
1 船舶电力推进直接转矩控制基本原理
船舶电力推进传统直接转矩控制原理如图1所示,该系统通过3S/2S坐标变换将检测到的三相定子电流和电压转换到两相静止坐标系中,并用磁链和电磁转矩观测器来观测定子磁链和电磁转矩以及磁链所在的扇区N,将其观测值分别与给定值ψ和T作比较得到磁链控制信号FC和转矩控制信号TC,结和扇区N选择相应的电压矢量,使其产生PWM脉冲信号来实现逆变器开关器件的开通与关断,并驱动电机运行,系统实现对电机转矩和磁链的直接控制[2]。
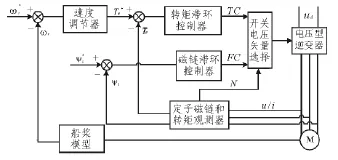
图1 船舶电力推进直接转矩控制原结构图Fig.1 Base structure of direct torque control
2 空间矢量脉宽调剂技术(SVM)的实现
通常可以将实现空间矢量脉宽调剂技术分为3个步骤:首先,计算参考电压矢量的所在区域位置,其次,选择两个相邻的非零矢量和一个零矢量通过矢量合成参考电压矢量;最后,计算出3个基本电压矢量的作用时间,并根据此生成相应的驱动逆变器的PWM脉冲信号。
2.1 计算参考电压矢量
参考电压矢量在α-β坐标系的分解如图2所示。

图2 参考电压矢量坐标Fig.2 The coordinate of reference voltage vector
由公式(1)计算参考电压矢量:
由式(2)计算参考电压矢量的幅值和相位:
2.2 相邻电压矢量的选择和作用时间计算
文中以参考电压矢量在第一扇区为例,u1、u2和u0作为基本电压矢量,t1、t2和t0则分别表示一个周期内基本矢量的作用时间[3]。其作用时间可用公式(3)表示:

3 基于PI锁相环的定子磁链观测器
3.1 基于锁相环的电压-电流模型定子磁链观测器
分析基于锁相环的电压-电流模型定子磁链观测器,可以得到在d-q坐标系下的定子电压方程:

上图中usα、usβ是异步电机在两相静止坐标系下α-β的定子电压,d为与定子磁链方向相同的坐标轴,q轴超前d轴。
同时可以得到观测器的输出为:
3.2 基于PI锁相环的定子磁链观测器
基于PI锁相环的磁链观测器结构如图4所示,由图可知,定子磁链的幅值并未参与到闭环反馈中,所以观测器的稳定性相比之下就有所提高了[4]。
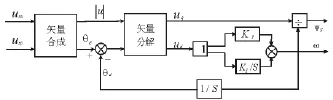
图3 基于PI锁相环定子磁链观测器Fig.3 Stator flux observer based on PI PLL controller
根据小信号分析方法来证明基于PI锁相环的定子磁链观测器的稳定性和有效性,假设观测器已经工作在稳定状态,且电压输入扰动Δθe很小,所以sinΔθe=Δθe,cosΔθe=1。施加扰动后的观测值用“∧”标注。由此可得图5中的ud、uq分量为:

因此在稳态时输入扰动Δθe,变换式子可得:

由此分析可以得到闭环传递函数为:

闭环传递函数的特征方程为:

由式(11)可知,影响PI锁相环定子磁链观测器的性能只与参数KP、KI有关,只要合理设置参数KP、KI就能得到预期的效果。
由此可以得到其稳定条件为:

4 船桨数学模型
船体和螺旋桨之间有非常强的耦合关系,因此将船体与螺旋桨作为一个整体考虑。根据船舶运动原理,螺旋桨的推力和阻力矩可以通过推力系数和扭矩系数计算出来。
可用公式(11)计算螺旋桨的推力:

可用公式(12)螺旋桨的阻力矩:

上式中,Kp为螺旋桨的推力系数,Km为螺旋桨的扭矩系数,它们都可以用进速比J来表示,ρ是海水密度(kg/m3),D是螺旋桨盘面直径(m)。n是螺旋桨桨轴转速(rpm)。
船舶在稳定航行状态时,总阻力R基本上与航速Vs的平方成正比,并且可以表示为:

式中,Kr是阻力系数,Vs是船速。船速可以由公式(14)求得:

上式中m为船舶的质量,t为推力减额系数。
5 仿真结果分析
本文仿真所用的仿真的异步电动机参数为[6]:P=50 kW、 V=380 V、Rs=0.3 Ω、Rr=0.816Ω、Ls=0.002 H、Lr=0.002 H、Lm= 0.069 H、J=0.089 kg.m^2、频率50 Hz、极对数Pn=2,螺旋桨直径D=0.35 m,船舶质量M=2.6 t,阻力系数Kr=0.1,海水密度ρ=1025 kg/m3。
5.1 空间矢量调制的DTC系统仿真
由以上的模型可以搭建基于空间矢量脉宽调制技术的直接转矩控制(SVM-DTC)系统,其中定子磁链估计然采用电压电流模型,其总体仿真模型如图4所示。
5.2 基于PI-PLL磁链观测器的SVM-DTC系统仿真
采用与5.1节中同样的仿真模型,只是把图4中的磁链观测器由基本的U-I模型换成现在的基于PI-PLL磁链观测器。
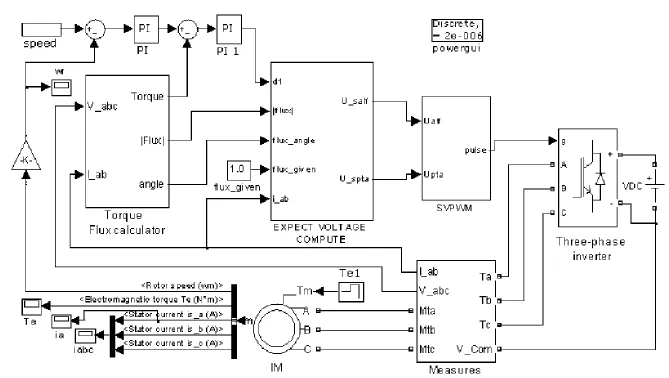
图4 基于SVPWM的DTC系统模型Fig.4 Model of DTC system based on SVPWM
5.3 结果对比分析
图5是仿真结果,基于U-I模型SVM-DTC系统的船舶电力推进所得到的仿真波形在上,而基于PI-PLL的SVM-DTC系统仿真波形在下给定电机的负载转矩保持为100 N.M,系统速度给定值在时间[0 0.5 1.0]s时分别为[200 400 600]m/s。得到如图5仿真波形:
通过对比基于U-I磁链估计的SVM-DTC系统特性曲线,由图5的定子磁链曲线可知,基于PI锁相原理的定子磁链观测器所观测的磁链值更接近于给定值,圆形轨迹脉动小,轨迹平滑。对比定子磁链幅值曲线,磁链观测值的误差范围可以控制在1.5%以内,所以基于PI锁相原理的定子磁链观测器能很好的估计磁链,跟踪给定磁链值。对比转矩响应曲线,可以看出定子磁链的值对电磁转矩的影响比较明显,磁链观测值越接近实际给定值,电磁转矩的脉动范围越小,转矩曲线更加平滑稳定。两种模型中,转矩的响应都非常快,这也体现出直接转矩控制系统响应快的优势。通过两种磁链观测模型下定子电流的曲线相比,由图6可知,基于PI锁相原理的SVM-DTC系统电流曲线的线径更小,所以电流脉动更小。当转矩稳定时,电流波形也能很好的保持正弦状,相比之下畸变较小。
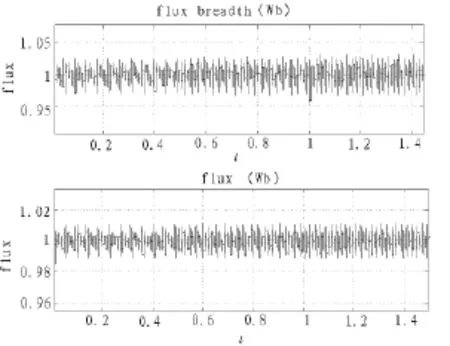
图5 定子磁链形幅值曲线Fig.5 The breadth curve of stator flux
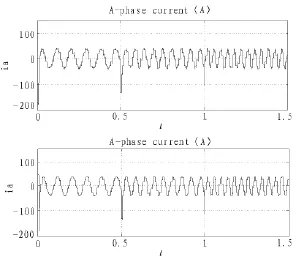
图6 定子A相电流曲线Fig.6 The curve of A phase current
6 结 论
分析表明,在SVM-DTC船舶系统中,相对于传统的U-I磁链估计模型,基于PI锁相原理的磁链观测精度有所提高,以致系统的转矩和电流脉动相对减小。
[1]ZHANG Zhi-feng,TANG Ren-yuan.Novel direct control based on space vecotr modulation with adaptive stator flux observer for induction motors[J].IEEE Transactions on Magnetics,2010,46(8):3133-3136.
[2]LI Yan,TANG Zhi-xing,LI Xin-you.Research on DTC technology of ship electric propulsion based on DRNN-MRAS speed estimation[C].The 2nd International Conference on Electronics,Communications and Control(ICECC 2012),16-18 October 2012:1208-1212.
[3]曾允文.变频调速SVPWM技术的原理算法与应用[M].北京:机械工业出版社,2010.
[4]高金文,温旭辉,陈静薇,等.新型锁相环定子磁链观测器[J].中国电机工程学报,2007,27(18):140-142.
[5]李殿璞.船舶运动与建模[M].2版.北京:国防工业出版社,2008.
[6]李兴友.船基于SVM的船舶推进电机直接转矩控制仿真研究[D].镇江:江苏科技大学硕士学位论文,2012.
SVM-DTC system simulation study based on PI-PLL propulsion ship power
ZHANG Li-chun
(Department of Electronic and Information,Jiangsu University of Science and Technology,Zhenjang 212003,China)
Stator flux observation system is not accurate question for Marine Electric Propulsion Direct Torque Control(DTC),This paper introduces technology space vector pulse width modulation (SVPWM)to reduce the current and torque ripple and fixed switching frequency.While using PI-PLL stator flux observer instead of common voltage-current model,combining direct torque control,space vector pulse width adjustment technology and oars model established based on PI-PLL Flux Observer SVM-DTC system simulation model,simulation results show that the accuracy of the stator flux observed a substantial increase in system performance has improved.
marine electric propulsion;DTC;SVPWM;PI phase-locked loop;flux observer
TN315
A
1674-6236(2016)04-0148-04
2015-04-07 稿件编号:201504047
张丽春(1990—),女,江西上饶人,硕士研究生。研究方向:船舶电力、电力电子。
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
微特电机(2021年6期)2021-06-22
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
电动工具(2020年4期)2020-08-20
计测技术(2020年6期)2020-06-09
电子制作(2019年15期)2019-08-27
北京航空航天大学学报(2017年6期)2017-11-23
