
小波神经网络多传感器信息融合在AUV深度测量中的应用
2016-09-12 10:04吴亚军毛昭勇
水下无人系统学报 2016年4期
吴亚军, 毛昭勇
(1. 海军装备部, 陕西 西安, 710077; 2. 西北工业大学 航海学院, 陕西 西安, 710072)
小波神经网络多传感器信息融合在AUV深度测量中的应用
吴亚军1, 毛昭勇2
(1. 海军装备部, 陕西 西安, 710077; 2. 西北工业大学 航海学院, 陕西 西安, 710072)
针对常规自主式水下航行器(AUV)深度传感器尚未考虑受内部环境温度、电流等影响的问题, 基于小波神经网络多传感器信息融合技术, 建立了融合温度传感器、电流传感器和深度传感器样本信息的 AUV深度测量紧致型小波神经网络结构模型, 并利用基于梯度的学习算法进行求解。试验数据表明, 深度传感器测量精度经过小波神经网络信息融合后, 测量误差大大降低, 很好地消除了环境温度、电流等干扰因素对深度传感器测量精度的影响。
自主式水下航行器(AUV); 深度传感器; 多传感器信息融合; 小波神经网络; 测量精度
0 引言
水下航行器作为人类开发和利用海洋的有效工具, 在科学研究、军事、工业等领域的应用越来越广泛。水下航行器拥有大量的测试传感器, 其中用于测量航行深度的深度传感器是非常重要的仪器, 如果测量精度较低, 将直接影响到航行器的控制及航行弹道轨迹, 也可能会使航行器耐压壳体超过其所能承受的最大工作深度, 导致航行器损坏。
水下航行器的所有仪器设备都封装在一个密闭的耐压壳体内, 而其动力能源绝大部分采用锂电池组, 由于锂电池组在使用过程中内部发生的电化学反应会不断产生热量, 使航行器密闭空间的内部环境温度发生变化, 同时锂电池组在放电过程中或多次充电使用后, 对外提供的电流也会发生变化, 这些因素都会对传感器的测量精度、稳定性产生影响。目前, 在水下航行器设计阶段,很少同时考虑环境温度、电流等多因素对深度传感器的影响。
由于小波神经网络对非平稳信息具有独特且良好的时频局部特性和变焦能力, 同时又具有神经网络学习和自适应的能力, 它不需要预先给出判别函数, 通过自身的学习机制就可以自动形成所需要的决策区域, 并充分利用温度传感器、电流传感器和深度传感器的样本信息, 对不同的样本进行逐一训练, 获得均衡的收敛的权值, 这些权值同时也代表了网络中内含的非线性映射关系。基于此, 为提高航行器深度测量的准确性, 文中采用小波神经网络技术, 融合深度、温度及电流等多传感器的信息,并利用基于梯度的学习算法进行求解, 较好地提高了水下航行器深度测量的精度。
1 小波神经网络
小波神经网络最早由法国著名信息科学研究机构 IRLSA于1992年提出, 是基于小波变换而构成的神经网络模型, 即用非线性小波基取代通常的神经元非线性激励函数[1-2]。小波神经网络相比于前向的神经网络, 具有明显的优点: 首先小波神经网络的基元和整个结构是依据小波分析理论确定的, 可以避免 BP神经网络等结构设计上的盲目性; 其次小波神经网络有更强的学习能力,收敛速度快, 精度高[3-7]。
1.1 小波变换


等效的频率表示
1.2 小波神经网络结构形式
目前小波变换和神经网络的结构结合方式主要有松散型结构和紧致型结构2种[8]。
1.2.1 松散型结构
先用小波分析对信号进行预处理, 信号的特征提取是通过将信号的内积与小波基进行加权和来实现的, 然后再将提取的特征向量送入神经网络处理, 如图1所示。

图1 小波神经网络松散型结构Fig. 1 Schematic of loose topological structure of wavelet neural network
1.2.2 紧致型结合
在小波变换和神经网络的结合过程中, 通过用小波函数来代替常规的神经网络隐层节点的传输函数来实现, 如图2所示。

图2 小波神经网络紧致型结构Fig. 2 Schematic of compact topological structure of wavelet neural network
1.3 学习算法
在确定了小波神经网络的结构之后, 小波基函数的时间平移因子和尺度伸缩因子也可事先确定, 因此, 小波神经网络的可调参数只有权值系数。小波神经网络参数的学习算法可以采用梯度下降法、正交搜索法、矩阵求逆法等。实际上, 由于小波神经网络的输出与其权值是线性的, 因而不存在局部最小的缺陷。
文中主要介绍紧致型连续参数的小波神经网络基于梯度的学习算法, 其数学模型表示如下[8-9]。


基于梯度下降法, 相应各参数调整过程如下


2 基于小波神经网络多传感器信息融合的AUV深度测量建模
文中主要针对水下航行器深度传感器的信息融合进行研究, 为了消除温度、电流因素对深度传感器输出值的影响, 建立了如图3所示结构模型。

图3 水下航行器深度测量结构图Fig. 3 Topological structure of autonomous underwater vehicle(AUV) depth measurement

设输出层到隐层的权值ijω, 隐层到输入层的权值jkω , 中间隐层的尺度伸缩因子和时间平移因子为和, 故。则t时刻有


3 仿真结果与分析
通过文中建立的水下航行器深度传感器信息融合小波神经网络模型, 设定小波神经网络学习速率分别为0.1, 0.001。选取标定压力(MPa)分别为0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6等7个标定点, 温度在25℃下, 电流(A)在0.5, 0.6, 0.7, 0.8, 0.9, 1.0,1.1下3个传感器输出值为训练样本, 通过小波神经网络进行训练建立深度传感器的数学模型, 并由测试样本得到压力预测值和压力预测值误差,见图4、图5。

图4 压力预测值与压力标定值对比图Fig. 4 Contrast of pressure prediction value and calibration value

图5 压力预测值误差曲线Fig. 5 Absolute error curve of pressure prediction value
由图4和图5可知, 文中建立的小波神经网络多传感器信息融合模型能够精确估计实际压力,很好地消除了温度、电流等干扰因素对深度传感器的影响。深度传感器经过小波神经网络信息融合后, 测量误差得到了大大的降低。
小波神经网络与BP神经网络都可以用于传感器输出性能的改善, 文中分别利用小波神经网络与BP神经网络[10]对深度传感器的测量误差进行分析, 取相同的网络结构、初始权值和阈值等参数进行训练, 仿真结果如图6所示。
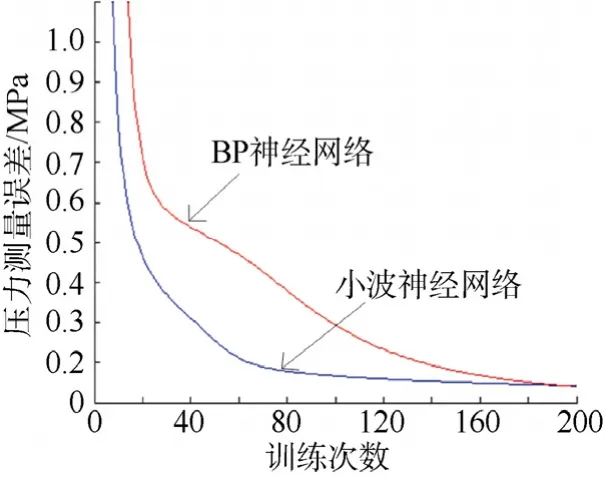
图6 2种神经网络误差预测曲线对比图Fig. 6 Contrast of absolute error curves of pressure prediction value between two kinds of neural networks
由图中结果可看出, 小波神经网络较BP神经网络所获得的压力测量误差小, 预测精度高, 能更好的预测实际压力。同时由误差曲线可以看出,小波神经网络比BP神经网络收敛速度更快。因此,小波神经网络可适用于深度传感器的信息融合,能较好地提高水下航行器深度测量的精度。
4 结束语
文中基于小波神经网络多传感器信息融合技术, 研究了提高水下航行器深度传感器的测量精度的问题。建立了融合温度传感器、电流传感器和深度传感器样本信息的水下航行器深度测量紧致型小波神经网络结构模型, 并利用基于梯度的学习算法进行求解。试验数据仿真表明, 深度传感器测量精度经过小波神经网络信息融合后, 可以有效地减小环境温度、电流等影响深度传感器稳定性的干扰因素, 改善其稳定性, 从而提高水下航行器深度测量的精度。
[1] Delyon B, Judisky A, Benveniste A. Accuracy Analysis for Wavelet Approximations[J]. IEEE Trans on Neural Networks, 1995, 6(2): 332-348.
[2] Van Ooyen A, Ninenuis B. Improving the Convergence of Back-propagation Algorithm[J]. Neural Networks, 1992,5(3): 465-471.
[3] 宋娜. 基于小波分析的车牌图像增强与字符识别研究[D]. 重庆: 重庆大学, 2010.
[4] 王凤霞. 基于小波神经网络的风力发电机组故障诊断方法的研究[D]. 北京: 华北电力大学, 2012.
[5] 高美静, 胡黎明. 基于遗传小波神经网络的压力传感器的非线性校正研究[J]. 传感技术学报, 2007, 20(4): 816- 819.
[6] 姚敏, 赵敏, 邢力. 基于小波神经网络的压力传感器温度补偿方法[J]. 传感器技术, 2005, 24(7): 13-15.
[7] 原泉, 董朝阳, 王青. 基于小波神经网络的多传感器自适应融合算法[J]. 北京航空航天大学学报, 2008, 34(11): 1331-1334.
[8] 胡江为. 基于小波神经网络多传感器融合技术的研究[D]. 淮南: 安徽理工大学, 2011.
[9] 程声烽, 程小华, 杨露. 基于改进粒子群算法的小波神经网络在变压器故障诊断中的应用[J]. 电力系统保护与控制, 2014, 42(19): 37-42.
[10] 庄哲民, 殷国华, 李芬兰, 等. 基于小波神经网络的风力发电机故障诊断[J]. 电工技术学报, 2009, 24(4): 224- 228.
(责任编辑: 杨力军)
Application of Multi-Sensor Information Fusion Based on Wavelet Neural Network to Depth Measurement for AUV
WU Ya-jun1, MAO Zhao-yong2
(1. Navy Armament Department, Xi′an 710077, China;2. School of Marine Science and Technology, Northwestern Polytechnical University, Xi′an 710072, China)
To consider the influences of internal ambient temperature, current and other factors on the measurement accuracy of an autonomous underwater vehicle(AUV) depth sensor, a compact type depth measurement model is established by means of the wavelet neural network based multi-sensor information fusion technology. This model fuses the sample information of temperature, current and depth sensors. The gradient based learning algorithm is adopted to solve the model. Experimental results show that the measurement error of the depth sensor is significantly reduced after wavelet neural network based information fusion, and the influences of the disturbing factors, such as internal ambient temperature and current, on the depth sensor are eliminated. It is concluded that wavelet neural network can be used in the information fusion of AUV depth sensor to effectively improve the performance of the depth sensor.
autonomous underwater vehicle(AUV); depth sensor; multi-sensor information fusion; wavelet neural network; measurement accuracy
TJ630.34; TB564
A
1673-1948(2016)04-0267-04
10.11993/j.issn.1673-1948.2016.03.005
2015-11-03;
2016-05-02.
吴亚军(1979-), 男, 工程师, 主要从事鱼雷科研和生产的管理工作.
猜你喜欢
现代电力(2022年2期)2022-05-23
科技风(2021年19期)2021-09-07
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
北京化工大学学报(自然科学版)(2020年1期)2020-06-22
电子制作(2019年13期)2020-01-14
电子制作(2019年19期)2019-11-23
电子制作(2019年24期)2019-02-23
创新作文(1-2年级)(2017年7期)2017-12-26
