
水下航行器弹射式发射装置筒壁开孔对内弹道的影响
2016-09-12 10:04马辉
水下无人系统学报 2016年4期
马 辉
(中国船舶重工集团公司 第726研究所, 上海, 201108)
水下航行器弹射式发射装置筒壁开孔对内弹道的影响
马 辉
(中国船舶重工集团公司 第726研究所, 上海, 201108)
为设计合理的水下航行器发射装置筒壁开孔方案, 提高发射效率, 文中采用多对多的交界面技术, 解决了带孔壁面间无间隙滑移的仿真难题, 建立了耦合求解非定常流场和活塞、航行器运动的数值仿真模型。在给定初始条件下, 通过 Fluent软件中的二次开发实现了发射装置储能筒壁在不同开孔形状和开孔面积下的航行器发射内弹道仿真, 对模拟流场以及运动曲线进行了分析。结果表明, 水下航行器发射装置储能筒壁开孔形状对出筒效率影响不大, 出筒效率主要受开孔面积的影响, 且随着开孔面积的减小, 出筒效率成指数下降。证明了基于多对多交界面技术的水下航行器发射仿真的可靠性。文中的研究可为弹射式水下发射装置设计提供参考。
水下航行器; 发射装置; 弹射式; 多对多交界面技术; 储能筒壁; 开孔
0 引言
水下航行器动力式发射装置主要分为涡轮泵式和弹射式[1]。涡轮泵式是指通过高压空气或强力水流进人发射管内后部, 使发射管中的航行器在短时间内受到强大的前向推力, 进而在很短的时间内达到较高发射初速并高速发射出管。弹射式是指通过某种作用于航行器等物体上的弹性力量快速释放, 使航行器以较大加速度和初速发射出管。目前使用较普遍的是涡轮泵式发射装置。
对于采用涡轮泵式发射装置发射航行器的内弹道分析, 国内学者开展了较多的研究。魏勇[2-3]等针对水压平衡式发射装置, 对气缸活塞行程与发射深度对航行器出管速度、抛射压力的影响等进行了研究。练永庆[4]等建立了等效弹性发射水舱数学模型, 对弹性发射水舱在发射过程中航行器内弹道的影响进行了定量分析。田兵[5]等建立了液压蓄能式发射装置发射的内弹道模型, 并在MATLAB/Simulink环境下进行了仿真。户柏顺[6]等建立了水压平衡式发射装置发射的内弹道模型,并在MATLAB/Simulink环境下进行了仿真。张孝芳[7]等对液压平衡式发射装置中活塞的缓冲特性进行了研究。
目前, 针对弹射式发射装置的研究[8-9]较多,而位于水下且采用弹簧动力发射装置的研究较少,且在内弹道的数值仿真过程中, 较少考虑筒内活塞等对流场的影响。文中采用多对多的交界面技术解决了活塞、航行器以及筒壁间小间隙相对运动的难点, 在 Fluent软件[10]的统一光盘格式(universal disc format, UDF)中通过二次开发来控制活塞、航行器的耦合运动, 实现了内弹道的数值仿真。通过分析, 获得了发射装置筒壁开孔形状以及开孔面积对内弹道的影响。
1 水下航行器弹射式发射装置
1.1 结构优化
水下航行器发射装置由上筒壁、储能筒、活塞、弹簧和导轨组成。弹簧位于活塞正下方下处于预紧状态, 航行器平行导轨垂直支撑于活塞上。航行器发射时, 控制活塞的开关松开, 弹簧推动活塞以及航行器向上加速运动, 活塞推送一定距离后与航行器分离, 航行器继续向上运动至出筒。水下航行器发射装置如图1所示。
针对水下航行器发射装置的几何特点以及预期的流场特征, 做出相应简化:
1) 考虑计算模型的对称性, 采用 1/4建模,较大程度节约了计算成本, 提高了计算效率;

图1 水下航行器发射装置结构简图Fig. 1 Structure of an underwater vehicle launcher
2) 由于航行器与活塞运动中会发生分离,导致航行器与活塞之间无网格填充, 从而计算无法顺利进行, 因此, 在航行器与活塞之间人为增加6 mm的小间隙, 该间隙上端面以航行器速度运动, 下端面以活塞速度运动, 从而保证航行器与活塞之间的网格一直存在, 使计算顺利进行;
3) 装置中导轨与弹簧在流场中所占体积较小, 且考虑其几何模型会使建模更加复杂, 故忽略弹簧及导轨的体积;
4) 由于模型各物理尺寸优化时存在一些固有的小间隙, 使高质量的网格划分较为困难, 故而根据间隙大小也做了相应简化假设, 当间隙小于 1 mm时, 直接忽略该间隙, 假设物面重合并忽略摩擦力, 比如活塞与筒壁之间的间隙通常设计为0.5 mm左右, 但实际使用中, 该间隙中通常以润滑剂填充, 因此, 忽略摩擦并假定物面重合是合理可行的;
5) 由于航行器的发射主要是筒内流动, 为了建模以及网格划分方便, 忽略外筒壁的厚度。
1.2 计算区域及网格划分
按照以上假设, 计算坐标系以及选取计算区域如图2所示。计算坐标系中心选取在航行器末端, z轴沿航行器轴线向上。航行器前方选取约4倍航行器长度的距离, 周向选取约 0.5倍航行器长度的距离以保证边界截断影响可以忽略。
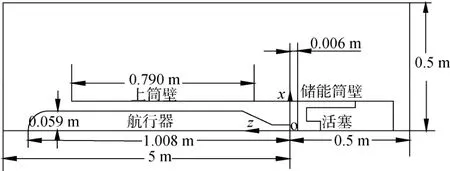
图2 计算流场区域Fig. 2 Computation flow field region
考虑到航行器与活塞均为单方向的运动, 可仅采用层铺的方式重构网格。在采用层铺的动网格模式下, 铺层主要体现在区域的边界上, 即以边界面上网格为基础逐层增加或减少, 由于航行器发射模型中涉及到多个物体的运动, 必须进行多区域划分并采用多对多的交界面技术。区域划分如图3所示。

图3 流场区域划分示意图Fig. 3 Schematic of dividing flow field region
图中, 1~8为计算模型采用的8组交界面, 其中1, 2, 3, 6为多对多的交界面。在多对多的交界面设置下, 交界面有一边为壁面或未定义边界时则该部分边界作壁面处理, 在交界面两边均为流场内域时则作为交界面传递信息, 这使得活塞壁与带孔筒壁间的滑移处理十分简便。相应地进行区域划分后, 计算网格如图4所示。

图4 计算网格划分图Fig. 4 Schematic of meshing
整个计算域网格数约 70万, 其中航行器以及活塞壁面采用边界层加密, 经试算能保证较高的精度和计算效率。
1.3 航行器及活塞运动控制
航行器水下弹射过程分为2个阶段。初始阶段, 活塞和航行器作为一个整体从零速度开始加速运动, 弹簧处于压缩状态, 继续运动一段时间后, 航行器与活塞分离, 进入第 2阶段。第2阶段航行器沿 z向做减速运动, 活塞在平衡位置附近上下振动。
对于第1阶段运动, 活塞与航行器作为一个整体运动, 受力方程

式中: k为弹簧的刚度系数; l为弹簧预压缩长度; z为航行器的位移; FR为流体作用于航行器与活塞上的总阻力; Gdh为航行器与活塞水中的总重量;md为航行器在空气中的质量; mh为活塞在空气中的质量; a为整体的加速度。
由式(1)即可获得物体在第 1阶段的加速度,再结合初始条件

即可确定物体在第1阶段的运动参数。在航行器与活塞加速向上运动的过程中, 弹簧提供的向上推力逐渐变小, 并且在过平衡位置后力作用的方向改变, 使活塞所受的阻力逐渐增大, 即在此过程中, 活塞加速度必然会在某个时刻小于航行器, 发生分离进入第 2阶段。这里, 判断活塞与航行器发生分离的条件为: 活塞加速度小于航行器, 即航行器的速度开始大于活塞, 发生分离。
在第 2阶段, 活塞与航行器单独运动, 而其相互影响则通过流体作用的总阻力体现。分离后,航行器方程

式中: FRd为航行器受流体的总阻力; Gd为航行器水中的重力; ad为航行器的加速度。
活塞受力方程

式中: FRh为活塞受水的总阻力; Gh为活塞在水中的重力; ah为活塞的加速度。
由上述方程即可获得任意时刻加速度, 在Fluent中由于只存在速度接口, 因此须在UDF中将加速度积分, 计算出速度返回。
2 发射装置筒壁开孔特性分析
2.1 筒壁开孔形状对航行器出筒效率影响
储能筒壁高度主要包括航行器从开始加速至弹簧平衡位置的路程, 储能筒壁的开孔关系到航行器加速阶段的补水是否充足。首先对储能筒壁的开孔形状加以研究, 校核其对补水效果的影响。为保证开孔不会导致结构上出现应力集中,不宜采纳多边形的开孔, 而选取圆形和长形2种开孔, 具体采用的计算模型如图5所示。
对于2种开孔方式, 保证储能筒壁开孔面积相同, 开孔面积为底面积的1.1倍, 模型其他主要参数见表1。相应计算出的速度位移曲线见图6~图7。由图中可见, 在保证开孔面积相同的情况下,2种开孔形状计算模拟的速度以及位移曲线几乎重合, 可见开孔筒壁的开孔形状对航行器的出筒效率几乎无影响。由表 2可见, 圆形开孔出筒时间略微小于长形开孔出筒时间, 且出筒速度略微大于长形开孔对于航行器出筒时的计算速度。就2种开孔形状而言, 圆形开孔的出筒效率要略微优于长形开孔, 但总体影响不大。

图5 不同形状开孔模型图Fig. 5 Models of different hole shapes

表1 不同开孔形状模型的相同参数表Table 1 Common parameters of different hole shape models

图6 不同开孔形状模型速度曲线图Fig. 6 Velocity-time curves of different hole shape models

图7 不同开孔形状模型位移曲线图Fig. 7 Displacement-time curves of different hole shape models

表2 不同开孔形状模型出筒效率Table 2 Out-tube efficiency for different hole shape models
2.2 开孔面积对航行器出筒效率影响
为研究储能筒开孔面积对弹射装置弹射效率的影响, 在充分考虑理论结构强度的要求下,针对储能筒壁进行了最大化透水孔设计, 使透水孔面积达到极限强度要求下的最大理论临界值。为了研究实际应用中的开孔面积与弹射效率的关系, 以此临界模型为透水面积最大的原始模型,研究不断减小开孔面积对出筒效率的影响, 具体模型见图 8。图中, 原始模型储能筒壁上开有 3排径向透水孔, 每排孔尺寸为 6×Φ30 mm; 5排径向小孔为装配孔, 每排孔尺寸为 6×Φ 18 mm。总开孔面积为横截面积的1.32倍, 储能筒壁外的其他参数见表3。

图8 原始模型图Fig. 8 Original model
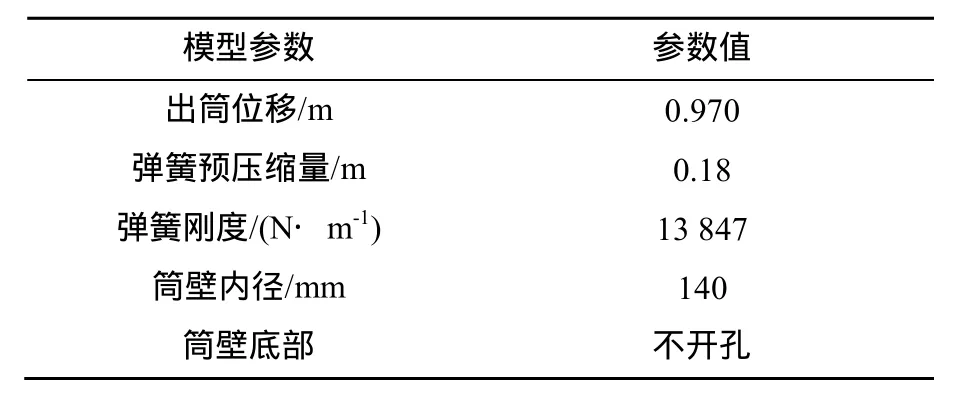
表3 不同开孔面积模型的相同参数表Table 3 Common parameters of different hole area models
文中首先针对原始模型的出筒效率进行分析, 然后通过选择封闭部分透水孔的方式进行开孔面积与出筒效率关系的研究。透水孔封闭方式为从上至下封孔, 分别为封1圈、封2圈以及全部封孔, 装置其余模型参数不变, 各模型数值计算的速度场云图见图9。

图9 t =0.06 s时水下航行器与活塞分离后速度场云图Fig. 9 Velocity field contour after separation of underwater vehicle and piston at t=0.06 s
图9中, 给出了0.06 s航行器与活塞分离后的 4个模型的速度场云图。由速度场云图可见,随着封孔圈数变多, 筒壁透水孔附近的流体颜色加深, 即流速增大。观察航行器与活塞间的流场可见, 随着封孔圈数越多, 筒壁的开孔面积减小,航行器与活塞之间的速度增大, 则相应地压力越小, 从而航行器所受阻力也越大。相应地给出速度与位移的曲线变化, 参见图10和图11。由图中可见, 随着封孔越多, 航行器在加速以及减速运动2个阶段所受阻力均增大。
表4给出了不同储能筒开孔模型下的出筒效率表。可知, 封孔1圈或2圈对航行器出筒效率影响并不大, 当封第3圈孔时, 出筒时间变为封2圈孔的2倍, 而出筒速度却变为封 1圈孔的1/7,可见对于文中测试的初始模型须至少保证1圈补水孔, 即补水面积不小于横截面积的 77%, 以保证补水充足。
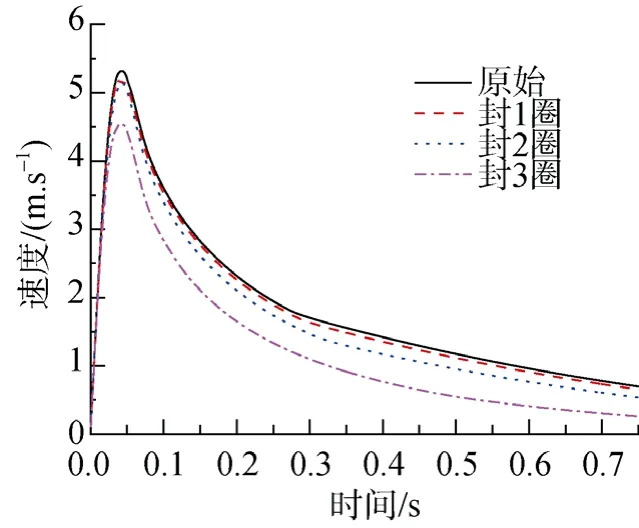
图10 不同开孔面积模型速度曲线图Fig. 10 Velocity-time curves of different hole area models

图11 不同开孔面积模型位移曲线Fig. 11 Displacement-time curves of different hole area models

表4 不同开孔面积模型出筒效率Table 4 Out-tube efficiency for different hole area models
根据表4的数据作图, 并将数据点采用B样条曲线拟合, 如图12所示。其中: 横坐标无因次开孔面积为储能筒壁开孔面积S除以发射装置筒底面积SD, 纵坐标为出筒速度与时间的数值。由图可见, 出筒时间与出筒速度均随无因次开孔面积约呈指数型变化, 在无因次开孔面积约小于0.9后, 出筒时间迅速增加而出筒速度迅速减小,因此储能筒壁的开孔面积不宜小于底面积的90%。

图12 不同开孔面积模型出筒效率Fig. 12 Out-tube efficiency for different hole area models
3 结束语
针对水下航行器由发射装置弹射出筒的过程, 在建模中考虑了流场中活塞与航行器的耦合作用, 使计算结果更为真实可信。同时采用了多对多的交界面技术, 解决了带孔壁面与活塞间无间隙滑移的仿真难题; 通过多区域划分, 仅采用滑移以及层铺的动网格模式即可完成数值仿真,保证了物体运动时网格的质量, 并且也提高了仿真速度。同时对弹射式水下发射装置的筒壁开孔形状以及开孔面积对航行器出筒效率的影响进行了相应研究。在影响弹体内弹道补水的主要因素里, 除了有储能筒壁的开孔面积外, 还有上筒壁以及活塞端面的开孔面积, 其数值变化必然导致最佳无因次开孔面积的数值产生偏移, 因此, 还有待进一步探讨。
[1] 朱清浩, 宋汝刚. 美国潜艇鱼雷发射装置使用方式初探[J]. 鱼雷技术, 2012, 20(3): 215-219. Zhu Qing-hao, Song Ru-gang. Preliminary Exploration on Launch Modes of U.S. Submarine Torpedo Launchers[J]. Torpedo Technology, 2012, 20(3): 215-219.
[2] 魏勇, 逄洪照, 赵祚德. 水压平衡式鱼雷发射装置气缸活塞行程对鱼雷内弹道的影响[J]. 火力与指挥控制,2013, 38(11): 137-140. Wei Yong, Pang Hong-zhao, Zhao Zuo-de. Impact Rese- arch on Torpedo Internal Ballistic for Cylinder Piston Effective Stroke of Hydraulic Equalized Torpedo Launcher[J]. Fire Control& Command Control, 2013, 38(11): 137-140.
[3] 魏勇, 逄洪照. 基于蒙特卡洛法的发射管内弹道参数分布的研究[J]. 鱼雷技术, 2006, 14(1): 31-34. Wei Yong, Pang Hong-zhao. In-tube Ballistic Parameters Distribution Based on Monte Carlo Method[J]. Torpedo Technology, 2006, 14(1): 31-34.
[4] 练永庆, 任德奎, 李宗吉, 等. 弹性发射水舱对潜艇鱼雷发射内弹道的影响[J]. 弹道学报, 2013, 25(1): 77-80. Lian Yong-qing, Ren De-kui, Li Zong-Ji, et al. Influence of Elastic Launching Tank on Interior Ballistics of Torpedo Launched From Submarine[J]. Journal of Ballistics,2013, 25(1): 77-80.
[5] 田兵, 王树宗, 练永庆. 液压蓄能式鱼雷发射装置内弹道建模与仿真[J]. 鱼雷技术, 2011, 19(1): 68-71. Tian Bing, Wang Shu-zong, Lian Yong-qing. Inner Trajectory Modeling and Simulation of Hydraulic Energy Accu- mulated Torpedo Launcher[J]. Torpedo Technology,2011, 19(1): 68-71.
[6] 胡柏顺, 穆连运, 赵祚德. 潜艇水压平衡式发射装置内弹道仿真建模[J]. 舰船科学技术, 2011, 33(7): 90-93. Hu Bai-Shun, Mu Lian-Yun, Zhao Zuo-de. Simulation and Model of Submarine Hydraulic and Balanceable Launching Equipment Inside Trajectory[J]. Ship Science & Technology, 2011, 33(7): 90-93.
[7] 张孝芳, 胡坤, 由文立. 液压平衡式水下鱼雷发射系统活塞缓冲特性数值仿真[J]. 兵工学报, 2011, 32(9): 1089-1093. Zhang Xiao-fang, Hu Kun, You Wen-li. Numerical Simulation on Piston Buffering Characteristics of Pressurebalanced Underwater Torpedo Launch System[J]. Acta Armamentarii, 2011, 32(9): 1089-1093.
[8] 邹广宝. 活塞式垂直弹射系统内弹道性能研究[C]//安徽: 中国宇航学会导弹航天器发射技术研讨会, 1998.
[9] 谢伟, 王汉平. 提拉式弹射内弹道特性的影响因素分析[J]. 固体火箭技术, 2016, 39(1): 146-150. Xie Wei, Wang Han-ping. Influential Factors Analysis on Interior Ballistic Performance of Lift-draw Ejecting Device[J]. Journal of Solid Rocket Technology, 2016, 39(1): 146-150.
[10] 丁源, 王清. ANSYS ICEM CFD 从入门到精通[M]. 北京: 清华大学出版社, 2013.
(责任编辑: 杨力军)
Influence of Tube Opening on Internal Trajectory of Underwater Vehicle Launcher with Ejection Mode
MA Hui
(The 726 Research Institute, China Shipbuilding Industry Corporation, Shanghai 201108, China)
A reasonable tube opening scheme for an underwater vehicle launcher is designed to enhance the emission efficiency. The multi-to-multi interface technology is adopted to solve the simulation difficulty of gapless slipping between walls with holes, and a simulation model is built to couple the unsteady flow field, piston and vehicle movement. According to the given initial condition, the internal trajectory simulation of energy storage tube with different area and shape of the hole is accomplished by secondary development in software Fluent, and the obtained flow fields and the movement curve are analyzed. The results show that the area of hole has significant effect on the out-tube efficiency,while the effect of hole shape can be ignored. The out-tube efficiency decreases exponentially with the decrease of the hole area. The reliability of the underwater vehicle launcher simulation based on multi-to-multi interface technology is proved. This study may provide a reference for the design of underwater vehicle launcher with ejection mode.
underwater vehicle; launcher; ejection mode; multi-to-multi interface technology; energy storage tube;opening
TJ635; V271.4
A
1673-1948(2016)04-0314-06
10.11993/j.issn.1673-1948.2016.04.0014
2016-06-15;
2016-07-15.
马 辉(1978-), 女, 工程师, 主要从事水下总体技术及流体计算.
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
农业工程技术(2022年1期)2022-04-19
数字海洋与水下攻防(2021年5期)2021-11-04
数字海洋与水下攻防(2020年5期)2021-01-04
装备环境工程(2019年7期)2019-08-21
弹箭与制导学报(2019年5期)2019-05-28
电子制作(2019年7期)2019-04-25
弹箭与制导学报(2018年5期)2018-02-21
北京航空航天大学学报(2017年6期)2017-11-23
汽车与新动力(2014年5期)2014-02-27
