
Research of MEMS Digital Inclinometer CalibrationCompensation Method*
2016-09-09 05:52LIUWeiLIJieLIUYimingNorthUniversityofChinaScienceandTechnologyonElectronicTestMeasurementLaboratoryTaiyuan03005ChinaKeyLaboratoryofInstrumentationScienceDynamicMeasurementNorthUniversityofChinaMinistryofEducationTaiyuan
传感技术学报 2016年6期
LIU Wei,LI Jie,2*,LIU Yiming(.North University of China Science and Technology on Electronic Test&Measurement Laboratory,Taiyuan 03005,China;2.Key Laboratory of Instrumentation Science&Dynamic Measuremen(tNorth University of China),Ministry of Education,Taiyuan 03005,China)
Research of MEMS Digital Inclinometer Calibration
Compensation Method*
LIU Wei1,LI Jie1,2*,LIU Yiming1
(1.North University of China Science and Technology on Electronic Test&Measurement Laboratory,Taiyuan 030051,China;2.Key Laboratory of Instrumentation Science&Dynamic Measuremen(tNorth University of China),Ministry of Education,Taiyuan 030051,China)
Based on the MEMS digital inclinometer,this paper establishes a calibration model for MEMS accelerom⁃eter sensing element and deduces a calibration method by means of analyzing the output characteristic of MEMS ac⁃celerometer in inclinometer.The calibration method is a gravity field static rolling experiment,offering the zero bias voltage and scale factor matrix,the installation error coefficients and other sensitive parameters at the same time. From the result of the test,the error analysis and compensation comparison shows that the measurement accuracy up to±0.05 degrees.The method meets the demand of high precision of angle measurement.
inclinometer;MEMS accelerometer;system calibration;error-compensation
MEMS数字倾角仪内部的核心敏感单元主要为MEMS加速度计。当加计敏感轴与水平面存在一定角度时,利用其输出加速度值与重力加速度分量的数学关系,实现对底面与水平面之间夹角的测量。数字倾角仪具有体积小、精度高、能耗低等优点,其在建筑、机械加工、路面状况监测等工程领域中都有着重要应用[1]。由于MEMS加速度计的相关参数直接影响数字倾角仪的测量精度,所以研究MEMS数字倾角仪的标定及误差补偿技术有着重要实际应用价值[2]。
1 倾角仪的结构组成
MEMS数字倾角仪由MEMS加速度计、信号调理和采集电路、显示和传输电路组成。双轴数字倾角仪是将两单轴加速度计的敏感轴相互正交放置,但在实际的系统集成过程中,MEMS加速度计、信号调理电路与装配结构之间一定会存在安装误差,进而导致MEMS加速度计的敏感轴Ax,Ay并非相互正交[3],图1为MEMS双轴数字倾角仪内部加计的具体放置方式,图2为MEMS双轴数字倾角仪的安装结构图。
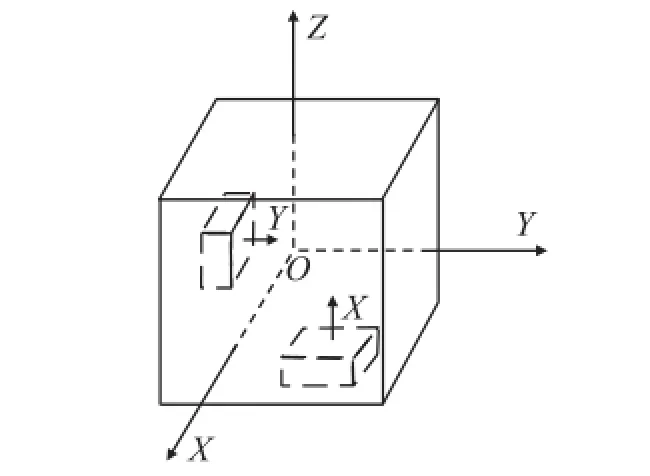
图1 MEMS加速度计放置关系
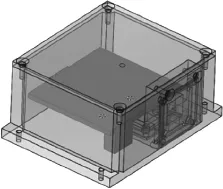
图2 数字倾角仪安装结构
2 标定数学模型
由图1可知,两轴MEMS加速度计的敏感轴以相互正交的方式放置,理想情况下为相互垂直,但是由于安装误差的存在,会导致MEMS加速度计敏感轴并非相互正交,此时的敏感轴变为X′,Y′,对正交坐标系各轴矢量进分解后,可得MEMS加速度计的安装误差角θij[4]。图3为系统安装误差角示意图。
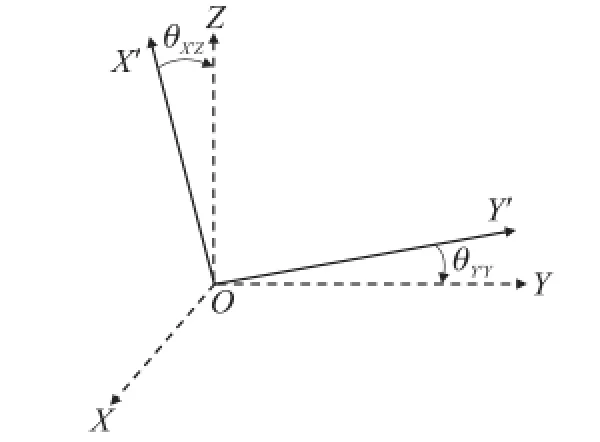
图3 安装误差角示意图
2.1标定数学模型建立
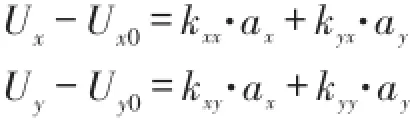
根据双轴数字倾角仪内部集成的MEMS加速度计的输出参数特性[5],建立在常温下数字倾角仪中MEMS加速度计的输出数学模型如下:

其中,Ux为X轴加速度计输出电压(V),Ux0为X轴加速度计的零位电压(V),Uy为Y轴加速度计输出电压(V),Uy0为Y轴加速度计的零位电压(V);ai为倾角仪中i轴加速度计输出加速度(m/s2),kii为i轴加速度计标度因数(V/gn),kij为i轴加速度计对j轴方向的安装误差系数(V/g),εi是i轴加速度计输出电压的噪声误差(V),其中i=x,y;j=x,y。由于在实际测量数据中的噪声误差εi在零点处上下均匀分布,平均处理后的噪声误差可近似为零,所以噪声误差对标定结果的影响可以忽略不计,将原公式简化得到的最终的标定数学模型表示为:
矩阵形式为:

根据上述简化后矩阵,可求解得出MEMS加速度计输出零位电压Ui0,标度因数kii及安装误差系数kij等标定参数,进而可求解得到所需安装误差角θij,其中i=x,y;j=x,y。
2.2系统标定方案
在常温环境中,采用重力场下静态翻转实验对MEMS数字倾角仪进行系统标定[6]。即,倾角仪安装在高精度三轴温控速率转台上,通过控制转台在位置模式下静态翻转360°,两MEMS加速度计分别敏感重力场±1 gn范围内的加速度,对x轴和y轴加速度计进行标定实验,图4所示为标定实验现场,具体系统标定方案为:①将倾角仪安装于转台台面中心,倾角仪结构中的x轴垂直于转台台面,y轴与转台台面平行,转台设置为位置模式;②系统先上电5 min,等待倾角仪工作稳定后,控制转台绕y轴顺时针旋转90°,转动中框使x轴在0~360°的范围内翻转,每间隔15°转一次,每个角度保持10 s,MEMS倾角仪敏感到的重力加速度为1 gn→0 gn→-1 gn→0 gn[7];③在标定过程中,倾角仪对加速度计输出的数据进行采集,每个位置点静止采集10 s数据,通过外接储存器将x轴加速度计输出电压值存储在外部Flash中;④再设置转台的位置回零,内框转90°,转动中框,此时y轴在0~360°的范围内翻转,重复上述两个步骤,将y轴加速度计输出电压值也存入外部Flash;⑤使用上位机读取存储器中加速度计的输出值电压。根据不同位置点加速度计输出值,计算出MEMS加速度计零点电压、标度因数和安装误差系数等标定参数。

图4 系统标定实验现场
倾角仪内部选用的是±2 gn的MEMS加速度计,在5 V供电时,理想零位电压输出为2.5 V,标定实验原始数据如图5、图6所示。

图5 X轴为主轴时,X、Y加计原始输出
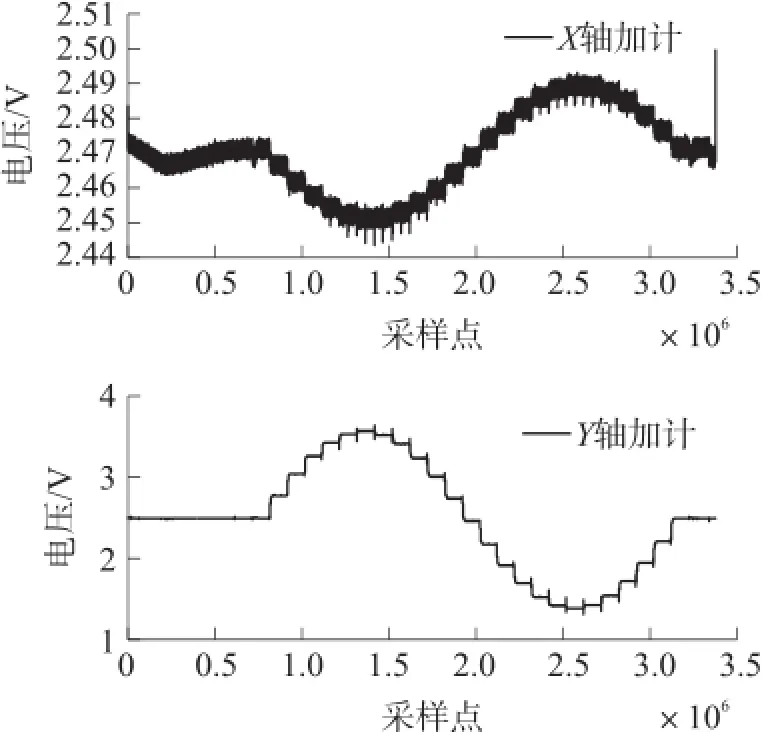
图6 Y轴为主轴时,X、Y加计原始输出
从原始数据看出由于安装误差的存在,X、Y轴做主轴转时,Y、X加计的输出存在约40 mV的波动。
2.3测试标定
根据第二部分拟定的倾角仪测试标定方案,在X、Y加计分别做主轴转时,采集得到倾角仪在不同角度下的两轴加计的输出电压,通过不同位置下两个通道加速度计的输出值利用最小二乘法进行一次拟合得到所求的零位电压、标度因数及其安装误差系数[8]。
通过MATLAB软件对采集到的加计电压数据进行处理,与各角度下的理论g值进行一次拟合得到倾角仪中MEMS加速度计的各项待标定参数[9],标度因数矩阵拟合图像如图7所示。
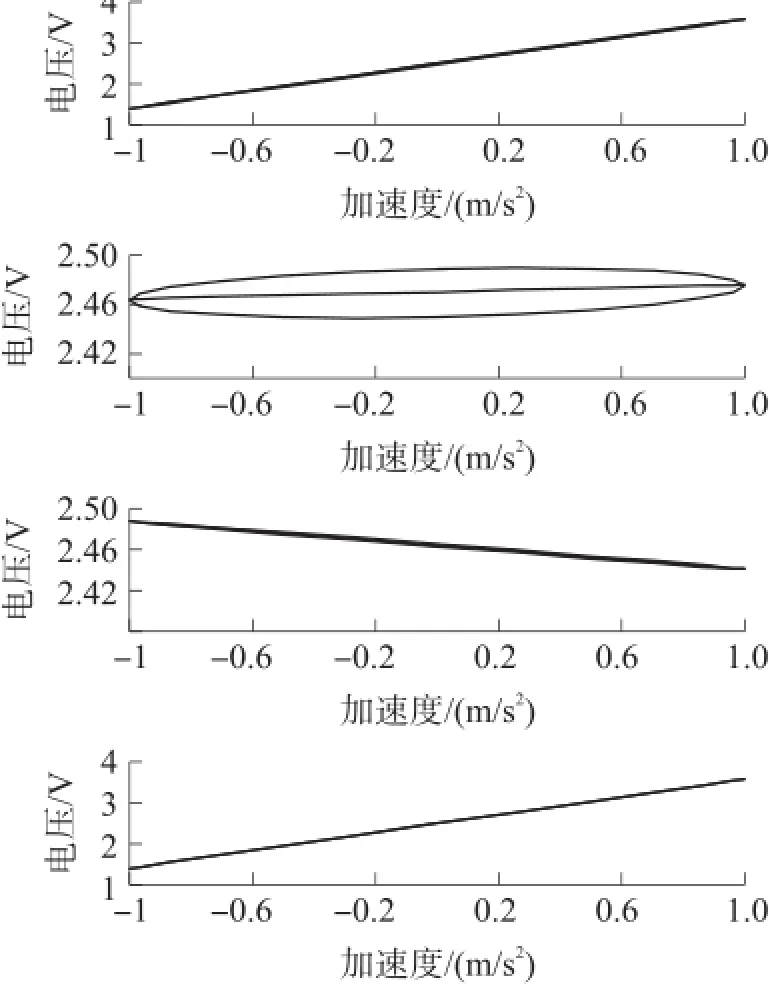
图7 标定参数拟合曲线
通过计算得到倾角仪标定模型所求各参数值,如表1所示。
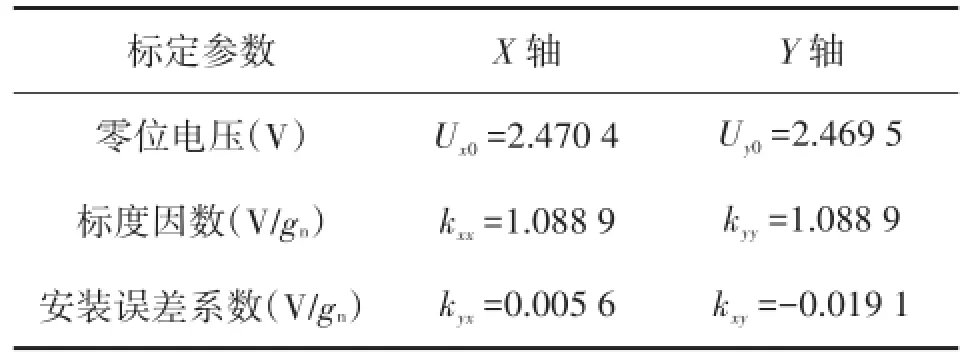
表1 倾角仪数学模型标定参数
对式(2)进行变换并求解标度因数矩阵求逆矩阵,可以得到如下加速度解算公式:

将标定得到的倾角仪参数分别代入式(3),对倾角仪中MEMS加速度的输出进行误差补偿[10],以在1 gn时为例,倾角仪的X轴和Y轴加速度传感器输出加速度值,做补偿前后加速度计输出结果的对比曲线如图8所示。
3 实验验证
本文提出一种MEMS数字倾角仪的标定补偿方法,通过高精度三轴温控速率转台来标定实验室自行研制的数字倾角仪。通过上述的标定实验,计算后得到倾角仪中MEMS加速度计的零位电压、标度因数及安装误差系数后,就需要对标定的系统进行软件补偿来验证该标定补偿方法的正确性,上位机软件对倾角仪输出的数据,通过解算算法,计算参数的优化,显示标定之后的角度输出值,与标定前的测量结果及标称的角度进行对比,对比结果如表2、图9所示[11]。
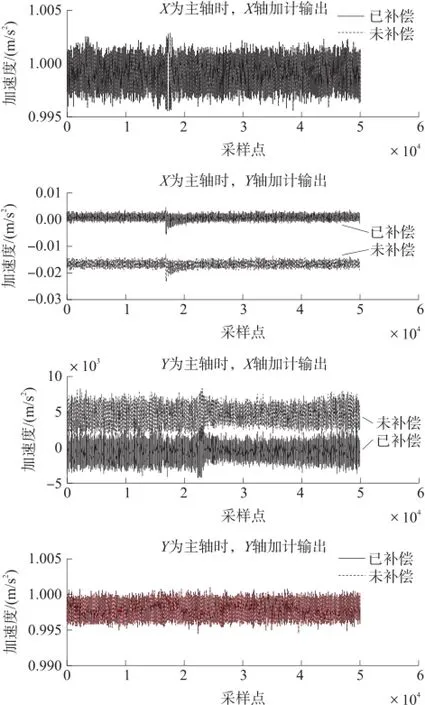
图8 补偿前后加速度计各轴输出结果对比曲线
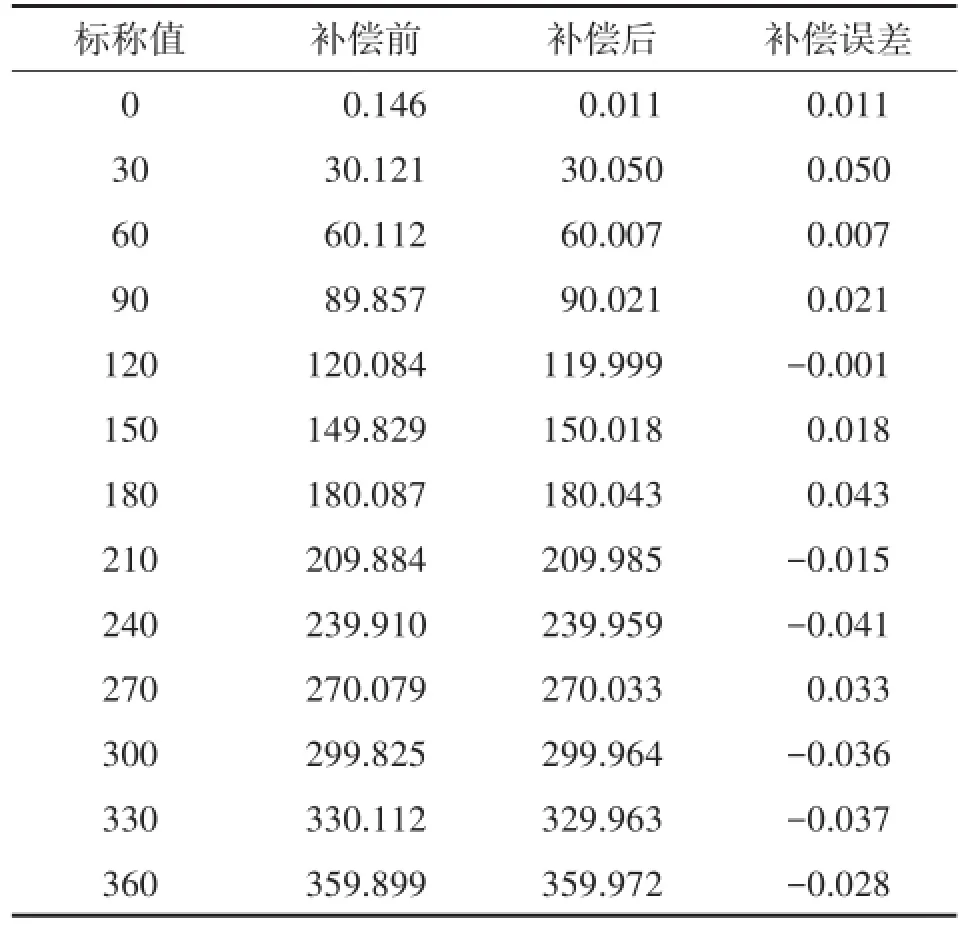
表2 补偿前后测量结果对比单位:(°)
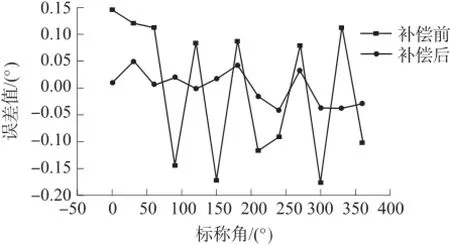
图9 补偿前后测量结果对比
4 结论
MEMS加速度计的标定及其误差补偿是提高MEMS数字倾角仪测量精度的有效方法之一,本文提出了一种对MEMS数字倾角仪的标定方法,该方法在建立标定补偿数学模型的基础上,通过标定方法制定对实验室自行研制的倾角仪进行了相关参数标定,计算得到了倾角仪的标定参数,最后对倾角仪进行系统软件补偿,达到测量精度的提高[12]。实验表明,该MEMS数字倾角仪标定补偿方法正确、有效,能使数字倾角仪的测量精度从±0.1°提高到±0.05°。
[1]刘俊,石云波,李杰.微惯性技术[M].北京:电子工业出版社,2005.
[2]张丽杰,常佶.一种免装配微惯性测量单元的研制与开发[J].中国惯性技术学报,2011,19(6):664-669.
[3]李杰,洪惠惠,张文栋.MEMS微惯性测量组合标定技术研究[J].传感技术学报,2008,21(7):1169-1173.
[4]范成叶,李杰,景增增.旋转弹用三轴加速度计安装位置误差标定补偿技术[J].传感技术学报,2013,26(10):1352-1356.
[5]孙宏伟,房建成,盛蔚.一种基于MEMS的微惯性测量单元标定补偿方法[J].北京航空航天大学学报,2008,34(4):439-442.
[6]Zhu Rong,Zhou Zhaoying.Calibration of Three-Dimensional Inte⁃grated Sensors for Improved System Accuracy[J].Sensors and Ac⁃tuators A,2006(127):340-344.
[7]陈剑,孙金海,李金海,等.惯性系统中加速度计标定方法研究[J].微电子学与计算机,2012,29(8):130-133.
[8]刘锡祥,徐晓苏.惯性测量组件整机标定技术[J].中国惯性技术学报,2009,17(5):568-576.
[9]Jie Li,Jun Liu,Wendong Zhang.MEMS Based Micro Inertial Mea⁃surement System[J].Wseas Transactions on Circuits and Sys⁃tems,2006(5):691-696.
[10]陈瑜,张铁民.低成本三轴微数字陀螺仪标定方法及实验研究[J].仪表技术与传感器,2014(7):48-51.
[11]陆辰,李荣冰,刘建业,等.微型航姿系统中三轴MEMS加速度计组合误差建模方法[J].测试技术学报,2011,25(1):29-34.
[12]白渚铨,张晓明,刘俊,等.基于加速度计的数字倾角仪误差建模与分析[J].传感技术学报,2013,26(8):1078-1082.

刘伟(1989-),男,苗族,贵州遵义人,硕士研究生,主要研究方向为智能传感器,微系统集成理论与技术,liuwei6608@ 126.com;

李杰(1976-),男,山西省岚县人,教授,博士生导师,主要研究方向为微系统集成理论与技术,惯性感知与控制技术,组合导航理论,计算几何及智能信息处理等,lijie@nuc.edu.cn。
EEACC:722010.3969/j.issn.1004-1699.2016.06.017
MEMS数字倾角仪的标定补偿方法研究*
刘伟1,李杰1,2*,刘一鸣1
(1.中北大学电子测试技术重点实验室,太原030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原030051)
在介绍MEMS数字倾角仪组成结构的基础上,根据数字倾角仪内部MEMS加速度计的输出特性,对MEMS加速度计的敏感单元建立数学标定模型,提出并推导了一种适用于MEMS数字倾角仪的标定方法;该方法可以得到双轴MEMS数字倾角仪中加速度计的零位电压、标度因数矩阵、安装误差系数等敏感项参数;通过重力场静态翻转实验对实验室研制的数字倾角仪进行标定;最后使用MATLAB拟合计算得到所求标定参数,并对测试结果进行了误差分析和补偿对比;实验结果表明,该方法能使MEMS数字倾角仪的测量精度提高到±0.05°,可以满足高精度的角度测量需求。
倾角仪;MEMS加速度计;系统标定;误差补偿
TP212.9
A
1004-1699(2016)06-0892-05
2015-12-09修改日期:2016-02-18
项目来源:国家自然科学基金项目(51575500)
猜你喜欢
科学与信息化(2021年12期)2021-12-27
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
客车技术与研究(2019年5期)2019-10-24
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
决策与信息(2014年21期)2014-12-13
导航定位与授时(2014年2期)2014-04-27

- 传感技术学报的其它文章
- Construction of a Cell Impedance Biosensor Based on Graphene Oxide/Polypyrrole-Indium Tin Oxide Micro-Electrode for Detecting Cell Adhesion and Proliferation*
- Acetone Gas Sensor Based on Al-Doped ZnO and Influence of Ultraviolet Excitation on Gas-Sensing Properties*
- Research of Fusion Classification of EEG Features for Multi-Class Motor Imagery*
- An Improved Method for Noninvasive Detection of Blood Glucose of Conservation of Energy Metabolism*
- Genetic Algorithms of Electromagnet in Longitudinal Wave Electromagnetic Utrasonic Dtection for Auminum Pate*
- Simulation and Experimental Investigation of Thickness Measurement Using Pulsed Eddy Current Technique*