
微扑翼飞行器驱动电路设计*
2016-09-08 09:23张卫平
传感器与微系统 2016年9期
吴 凡, 张卫平, 胡 楠, 邹 阳
(上海交通大学 电子信息与电气工程学院,上海 200240)
微扑翼飞行器驱动电路设计*
吴凡, 张卫平, 胡楠, 邹阳
(上海交通大学 电子信息与电气工程学院,上海 200240)
扑机械昆虫是很小、高机动的仿昆飞行机器人,在勘探、环境监测、搜索和救援、监视等一系列任务中非常有用。压电执行器有小尺寸、高效率、高功率密度的优势,这展示了在微机器人领域的应用前景。实验是通过升压转换器将3.7 V锂电池增加到250 V以上实现的。通过展现压电驱动器的驱动要求、电路拓扑和用于微机器人的压电驱动器的不同控制方式来探索驱动电路设计,并提出克级驱动电路。
微扑翼飞行器; 压电驱动器; 驱动电路; 升压转换器
0 引 言
应用于机器人,特别是在仿生机器人这种小尺寸机械系统中,小型化又能提供动力的驱动器有很多。近些年,一些驱动方式,如压电[1]、静电[2]和非传导弹性驱动器[3]已经被提出或已应用于微机器人。上述的驱动方式都是通过向不同电极充电或放电来产生高电压偏置实现机械输出的。电路实现主要有两个难点:1)从低压电源获得高压驱动信号。2)回收未使用的能量。
大多数的小型能量源都可以适用于微机器人应用,比如锂电池、超级电容器[4]、太阳能电池[5]、燃料电池都可以产生小于5 V电压。通常,压电陶瓷驱动器的电压转换电路需要有50~100 L压率。所以,需要慎重地选择并最优电压转换电路,以避免质量大、效率低的电路降低系统整体性能。
除了有提升电压的功能,驱动电路必须能在压电执行器的输入电极上产生时变信号。这就面临第二个问题:在执行器中只有小部分的电能转变成有用的机械输出[6]。为了使整体系统的效率最大化,希望产生一个合适的驱动信号并尽可能回收未使用的能量。
本文设计了一种可以产生时变高电压的电路,可以达到微机器人系统严格的重量要求和系统效率最大化。
1 压电执行器的驱动要求和方式
压电驱动器适用于很多拓扑电路,包括线性设备如串联驱动器和组合设备如单极与双极驱动方式[7]。
1)压电驱动器的等效电路
压电部分可以用驱动器和负载的机械特性连接阻抗的等效电路来表示。尽管还有多种深化电路已经更好的展现了压电驱动器的非线性特性,但该电路模型已被IEEE采纳为压电陶瓷的通用标准[8]。
如图1,电路包括了静态部分,包括基础电容C0,非传导损耗Rp和磁滞损耗Rs,还有很多共振分支,每个分支都代表了一个机械振动模型。在每个分支中Li,Ri,Ci代表了振动方式的等效质量、阻尼系数、弹性系数。虽然磁滞是非线性损失,不能完全通过线性电路元件表现,但等效电路参数可以在一个特定的工作电压和频率下提供很好的磁滞损耗近似。
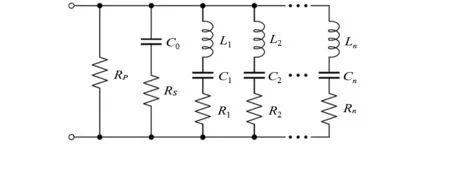
图1 压电陶瓷等效电路图
2)驱动电路要求
为了确保驱动器的功能和最大效率,高电压驱动电路应该能产生任意波形的单极驱动信号,且可以从驱动器回收未使用的能量。
压电驱动器可以用单极或是双极信号驱动。用双极驱动时,驱动信号在正负电压之间变换使压电片伸缩。用单极驱动时,电压只能是正的,使压电片收缩,在微机械的应用中,压电驱动器通过应变提供给机械系统运动能量,因此高驱动电压可以使翅膀拍打。由于反接高压驱动信号会使压电部件去极化,所以,在压电陶瓷施加的驱动信号必须是正向的[9]。
3)驱动方式
为了驱动单层压电片,驱动器的电极上直接连接一个可变的单极源,如图2(a)所示。双压电片有两种驱动方法如图2(b)和(c)。图2(b)的方法称为“交替驱动器”,包括连接到各自相应外电极并且操作相位差180°的两个可变的单极源,在中心电极上有共接点。图2(c)的方法中,称为"同步驱动",由单极源施加一个恒定的高电压偏置,双压电片共接点连接可变单级源。
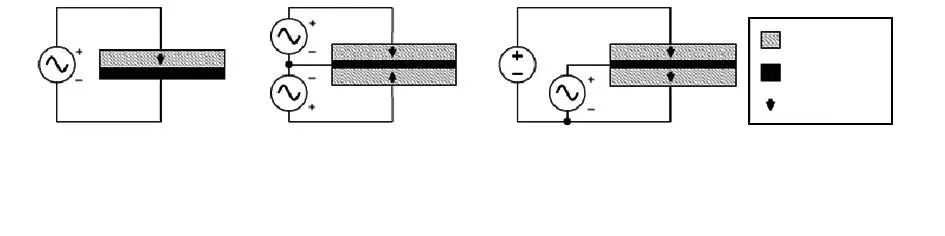
图2 压电片的驱动方式
2 两级驱动电路
开关电源,结合无源元件与有源半导体开关,可以有效地从电源转换低功率能量,最适合于解决微型机器人应用的小型化要求。本节描述了包括电压变换阶段和驱动信号阶段,可用来驱动一个或多个双晶片,如图2(c)中的双级驱动电路。
1)电压转换阶段
自耦的升压转换器如图3所示。在低功耗、高升压应用中,这种拓扑结构比其他升压拓扑结构拥有更多优势[10]。该设计也很容易小型化,而小型化对于其它拓扑来说可能会降低效率或可制造性。
当开关晶体管Q导通时,电流积聚在自耦变压器的初级绕组Lp。当Q关断时,存储在该磁芯中的能量通过初级和次级绕组被释放成高电压输出。
该转换器工作在非连续模式下,自耦变压器中的电流必须在一个新的开关周期开始前返回到零。在低功率能级输出这种操作模式通常有更高的效率,并简化了控制回路的设计。
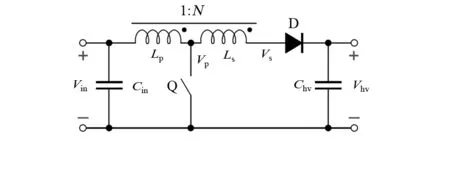
图3 升压转换电路图
在非连续模式下,电压升压比由下式给出
(1)
式中Vin,Vhv为输入和输出电压,T为开关周期,Iout为负载电流,ton为导通时间开关,Lp为初级绕组的变压器的电感。
如图4,输出电压是通过电阻分压反馈器和一个模拟比较器监测。当输出电压降到某个阈值之下时,开关晶体管导通,提供一定能量到输出。这种控制方法在有负载的情况下通过改变充电脉冲的占空比使输出电压达到期望的数值。
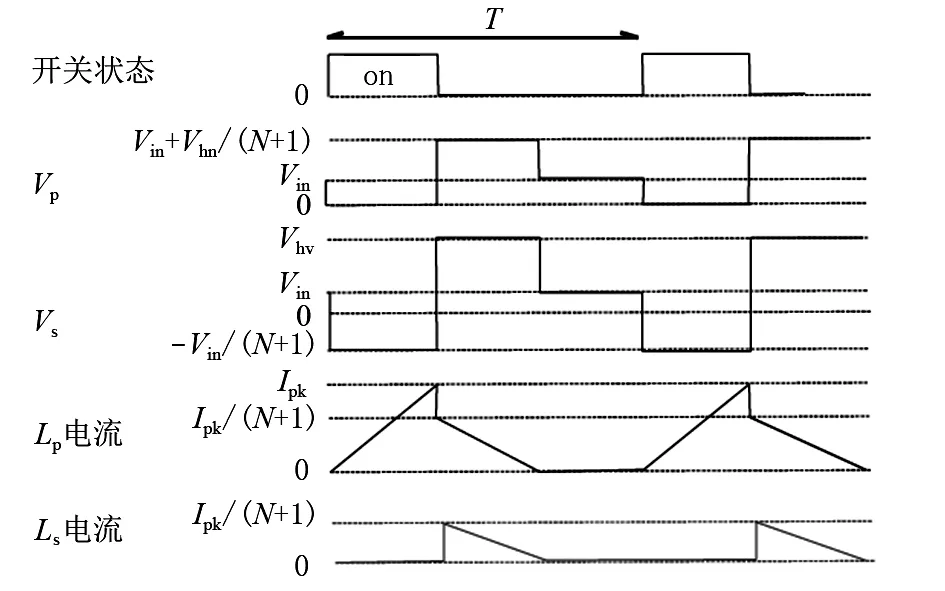
图4 升压转换器电路电压电流图
2)高电压驱动级
图5的驱动电路是一个双向转换器:传递能量到负载和从负载中回收能量。通过使用理论上无损的LC网络(包括电感器和驱动器的主电容),这样的设计能够产生一个任意的单极输出波形的同时,可以从负载回收未使用的能量。当高侧开关QH导通时,电感电流开始上升。当QH关闭,惯性电流通过二极管DL完成节点Va的充电,相反,打开低侧开关QL从Va移除电荷和将它返回到电源,通过电容器Chv代表电源,当Ql关断电流通过二极管DH放电。通过在适当的时间发出充电和放电脉冲的序列,能够在Va产生任意波形。电压和电流波形的单个开关周期示于图6。
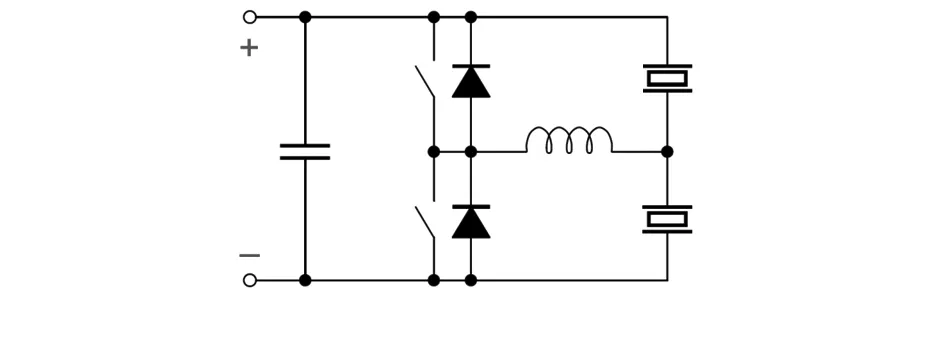
图5 驱动信号产生电路
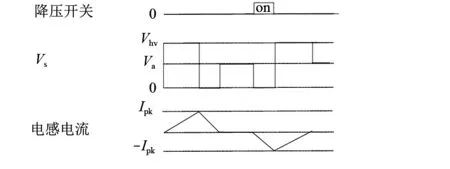
图6 驱动信号产生电路的电压电流图
充电脉冲和放电脉冲之后在输出电压的变化计算公式如下
(2)
(3)
式中Va为在放大器的输出电压,Ca为致动器的电容,L为电感值,Ipk为峰值电感电流。此外,通过一个电感器的恒定电压和随时间变化的电流(V=Ldi/dT)之间的关系可以用来计算高侧和低侧开关的导通时间,tonH和tonL,这将导致一个电感电流IPK
(4)
(5)
式中Vhv为驱动级的电源电压,所有其他量的定义如上。
3 实验实现
前述的电路是采用分立元件的PCB电路来实现。在概念证明阶段中,控制功能是通过板外STM32单片机的片上ADC和模拟比较器实现。在未来的实施中,这将是由一个自定义、低功耗、预计裸模重量2 mg、功耗不到的100 μW集成电路取代。由于理想的高效的控制电路的重量和功率消耗与STM32的差别很大,所以,将单片机控制设备排除在总重量和效率的计算外。
定制的微型变压器使用3×15 mm的软磁铁氧体作为线轴,重量0.463 g。初级线圈15 mg,次级线圈279 mg,在单级驱动器和双级驱动器的直流转换级中使用的变压器具有10~12 μH初级电感,匝数比为20,有20~40 Ω的串联电阻,和0.7~0.8的耦合系数。该升压转换器输入电压为3.7 V(典型的锂聚合物电池),图7为230 V和270 V的输出电压测量的效率,该升压转换器在0.1~0.15 W的输出功率时效率最高。
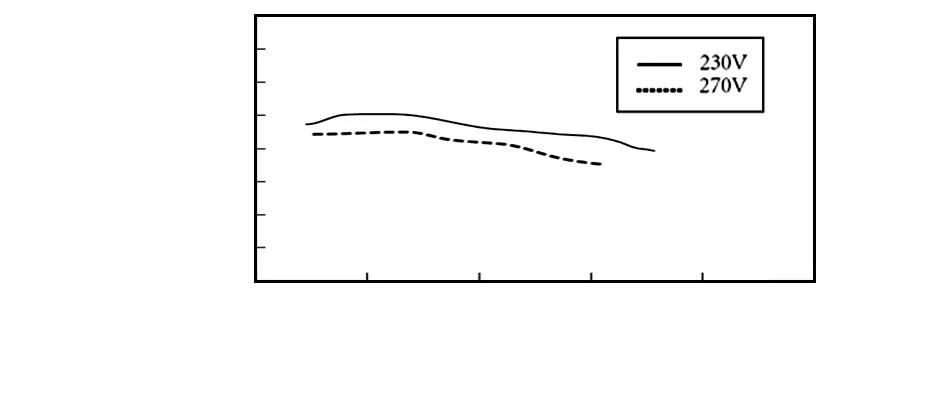
图7 输出为230 V和270 V的效率
当负载连接至双压电陶瓷时,升压转换器输出电压如图8。
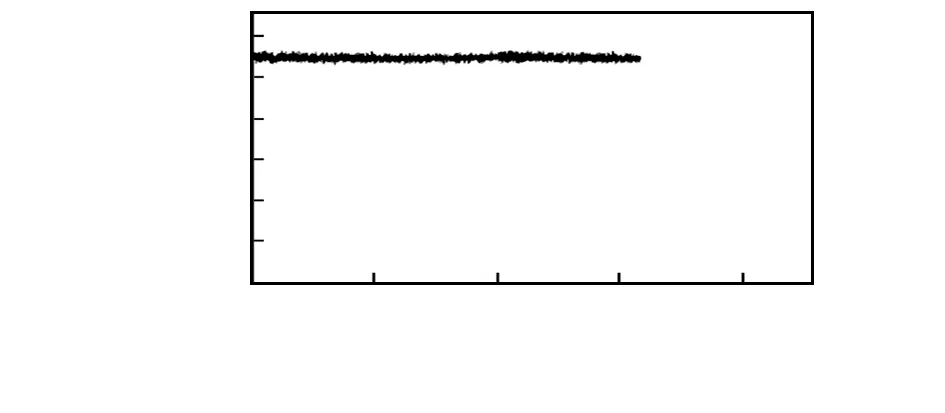
图8 升压电路的输出电压波形图
在一个静止的测试台上,将微扑翼飞行器固定在两根导轨上以限制其运动路径,双压电陶瓷片连接至飞行器的机械转动轴和机翼上,采取外部供电方式来验证本驱动电路的性能。图9显示为该双级驱动电路工作于该微飞行器系统的高速摄像图,翅膀拍打角度大约90°,翅膀拍动频率为60 Hz。

图9 升压电路及微扑翼飞行器展示
由于飞行是微型机器人运动最耗电的模式之一,所以飞行运动的成功表明:该驱动电路也将适用于其他能量消耗较小的机械系统,如压电式爬行机器人。
4 结 论
本文设计了用于驱动压电执行器的小型化克级升压电路的设计。对压电驱动器的电气特性进行了讨论,并建立最佳的驱动要求。对电路的实验结论进行了描述,包括克级别、升压比60的电压转换器,功率密度超过1 600 W/kg,并有产生任意的输出信号和从负载回收能量的能力。同时展现该驱动电路应用到扑翼机器人昆虫的适用性。
下一步工作将集中在升压电路的持续优化和小型化上。将通过定制磁性元件以提高线圈耦合,减轻重量,并减少电磁干扰。使用集成电路进行电路控制将进一步降低电子器件封装的重量。
未来低功耗的集成电路将会是微型机器人实现独立系统必需的方式。
[1]陈文元,张卫平.微型扑翼式仿生飞行器[M].上海:上海交通大学出版社,2001.
[2]Hollar S,Flynn A,Pister K S J.Solar powered 10mg silicon robot[J].Micro-Electro-Mechanical Systems,2003,60:706-711.
[3]Kornbluh R D.Electroelastomers:Applications of dielectric elastomer transducers for actuation,generation,and smart structure-s[J].Industrial and Commercial Applications of Smart Structures Technologies,2002,254:254-270.
[4]Schneuwly A.Charge ahead (ultracapacitor technology and applications)[J].Power Engineer,2005,19:34-37.
[5]Bellew C L,Hollar S,Pister K S J.An SOI process for fabrication of solar cells,transistors and electrostatic actuators[C]∥Solid-State Sensors and Actuators Conf, 2003:1075-1078.
[6]Campolo D,Sitti M,Fearing R S.Efficient charge recovery method for driving piezoelectric actuators with quasi-square wave-s[J].IEEE Trans on Ultrasonics,Ferroelectrics,and Frequency Control,2003,50:237-244.
[7]Wood R J,Steltz E,Fearing R S.Optimal energy density piezo-electric bending actuators[J].Sensors & Actuators:A,Physical,2005,119:476-488.
[8]Guan M,Lao W H.Studies on the circuit models of piezoelectric ceramics[J].Information Acquisition,2004,50:26-31.
[9]Sahai R,Avadhanula S,Groff R,et al.Towards a 3g crawling robot through the integration of microrobot technologies[J].IEEE Robotics and Automation,2006,30:296-302.
[10] Vazquez N,Estrada L,Hernandez C.The tapped-inductor boost converter[C]∥IEEE Int’l.Symposium on Industrial Electro-nics,2007:538-543.
Design of driver circuit for micro ornithopter*
WU Fan, ZHANG Wei-ping, HU Nan, ZOU Yang
(School of Electronic,Information and Electrical Engineering,Shanghai Jiao Tong University,Shanghai 200240,China)
Flapping-wing robotic insects are small,highly maneuverable flying robots inspired by biological insects and useful for a wide range of tasks,including exploration,environmental monitoring,search and rescue,and surveillance.Piezoelectric actuator has advantages of high efficiency and power density in very small geometries,which shows application prospect in microrobotic field.Experiment is realized by boost converter stepping up a 3.7 V Li cell to 250 V.By establishing drive requirements of piezoelectric actuators,circuit topologies and different control mode suitable for different driving types of piezoelectric actuators in microrobotic applications,and present G level drive circuits.
micro ornithopter; piezoelectric actuator; drive circuit; boost converter
10.13873/J.1000—9787(2016)09—0075—03
2015—11—20
教育部新世纪优秀人才支持计划资助项目(NVET 10—0583);教育部支撑项目(62501040303);国防项目(9140A26020313JW03371)
TM 423;TM 133
A
1000—9787(2016)09—0075—03
吴凡(1991-),男,陕西西安人,硕士研究生,主要研究方向为微扑翼飞行器驱动电路研究。
猜你喜欢
电脑爱好者(2020年6期)2020-05-26
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
北京航空航天大学学报(2017年5期)2017-11-23
军事文摘·科学少年(2017年2期)2017-04-26
光学精密工程(2016年5期)2016-11-07
现代检验医学杂志(2015年5期)2015-02-06
西安交通大学学报(2014年7期)2014-04-16
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
