
地铁隧道全站仪自动化监测的技术难点问题及解决方案
2016-09-08 02:11黄鸿伟
测绘通报 2016年8期
黄鸿伟
(广州广瑞测绘仪器有限公司, 广东 广州 510000)
地铁隧道全站仪自动化监测的技术难点问题及解决方案
黄鸿伟
(广州广瑞测绘仪器有限公司, 广东 广州 510000)
地铁旁的基坑开挖可能引起的地铁外部荷载的变化会对地铁结构安全造成影响,因此对地铁结构进行监测,了解其变形情况和原因并采取有效措施,对于预防工程事故、保证地铁的正常运营是非常重要的。
深圳前海自贸区在开展大规模开发建设的同时,注意对运营地铁结构的保护监测。前海地铁保护监测项目是针对前海湾的罗宝线、环中线地铁结构进行的全自动监测。项目监测区间长,工作基点位于变形区内,极易受地铁运行列车振动和气流变化、基坑施工中打桩引起振动等不利因素的影响,现场部分区间没有网络信号,因此如何确保监测数据的精度和传输成为面临的关键问题。本项目采用6台索佳NET05AXII测量机器人和南方SMOS监测系统,通过连续监测,及时准确地掌握了地铁结构的变形情况。
一、监测系统组成
自动监测系统主要由索佳NET05AXII测量机器人、南方SMOS监测系统软件、通信控制系统和监测棱镜组成。
1. 索佳NET05AXII测量机器人
地铁运营期保护监测项目特点决定了只能采用自动化监测,而且系统安装调试只能在地铁运营窗口期间进行,实施时间非常短。项目采用了索佳NET05AXII测量机器人(如图1所示),它具有目标自动识别、照准及自动测量功能,测角精度0.5″,测距精度0.8 mm+1×10-6D。索佳NET05AXII的目标照明和激光指向功能在快速发现并照准目标时大大提高了安装调试的速度。
2. 监测棱镜
目标棱镜设置在基准点和变形点上。目标棱镜采用标准圆棱镜或L型小棱镜(如图2所示),目标距离较近时选用L型微棱镜,较远时选用标准圆棱镜或L型棱镜。在隧道壁上牢固安装好棱镜,并使棱镜面正对工作基点(即测站点),安装棱镜时注意不能穿透防水层,对于在隧道下方的监测点,为了防止碰动点位可加角钢进行保护。

图1 索佳NET05AXII测量机器人
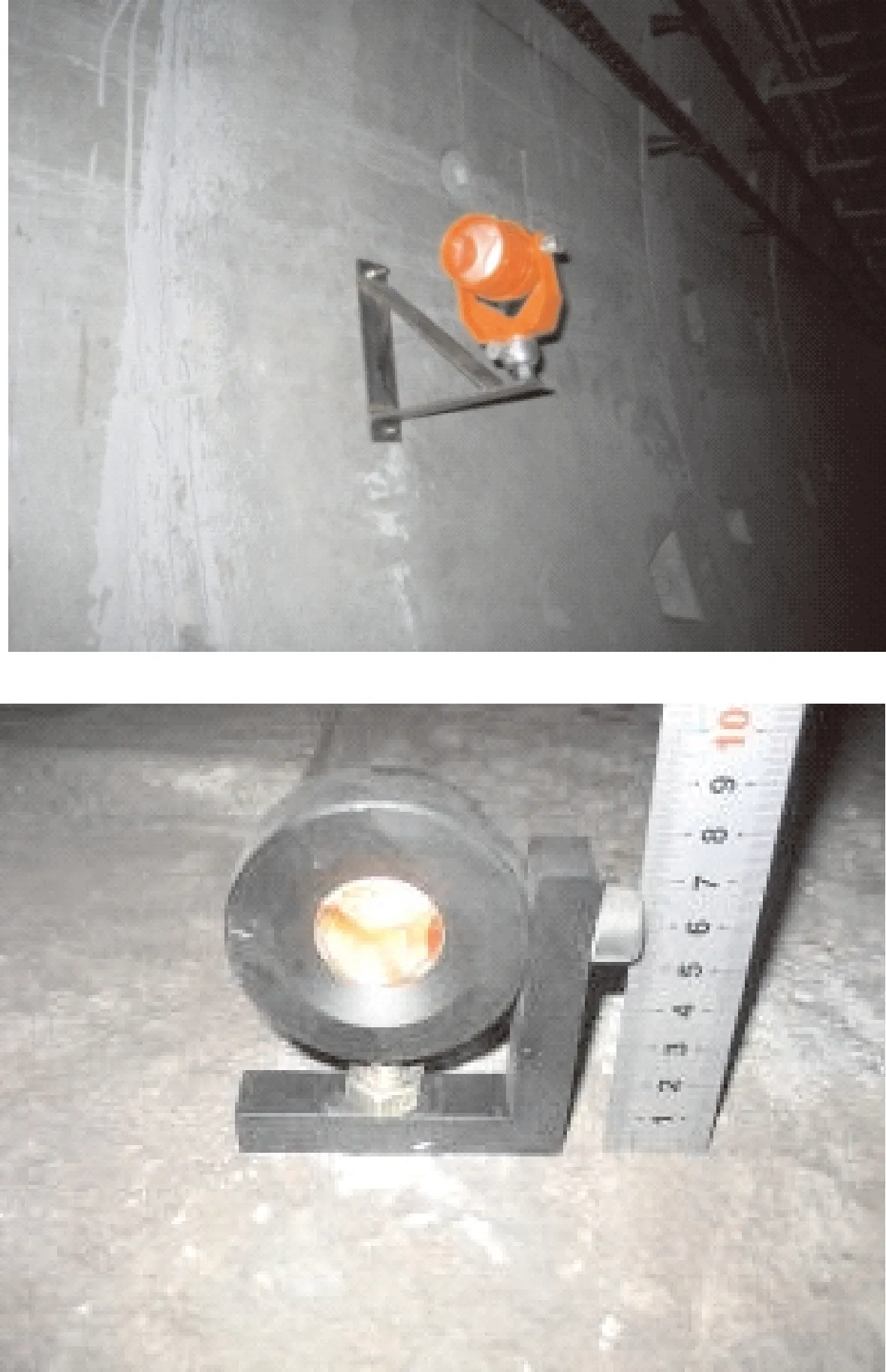
图2 标准棱镜和L型棱镜
从基坑施工开始直至主体结构回填完成土体变形稳定为止,对受施工影响的地铁隧道结构进行变形自动监测,从而准确测量出地铁隧道结构在三维方向的局部变形和隧道整体的变形值、变形的准确位置、最大最小值、变形方向和变形速率等(如图3所示)。
3. 通信控制系统
监测系统中一般通过GPRS无线网络控制全站仪进行自动化监测。本项目在部分区间没有网络信号采用了光纤延长至有无线网络的区间,再通过GPRS实现网络远程通信,并支持远程电源管理(如图4所示)。
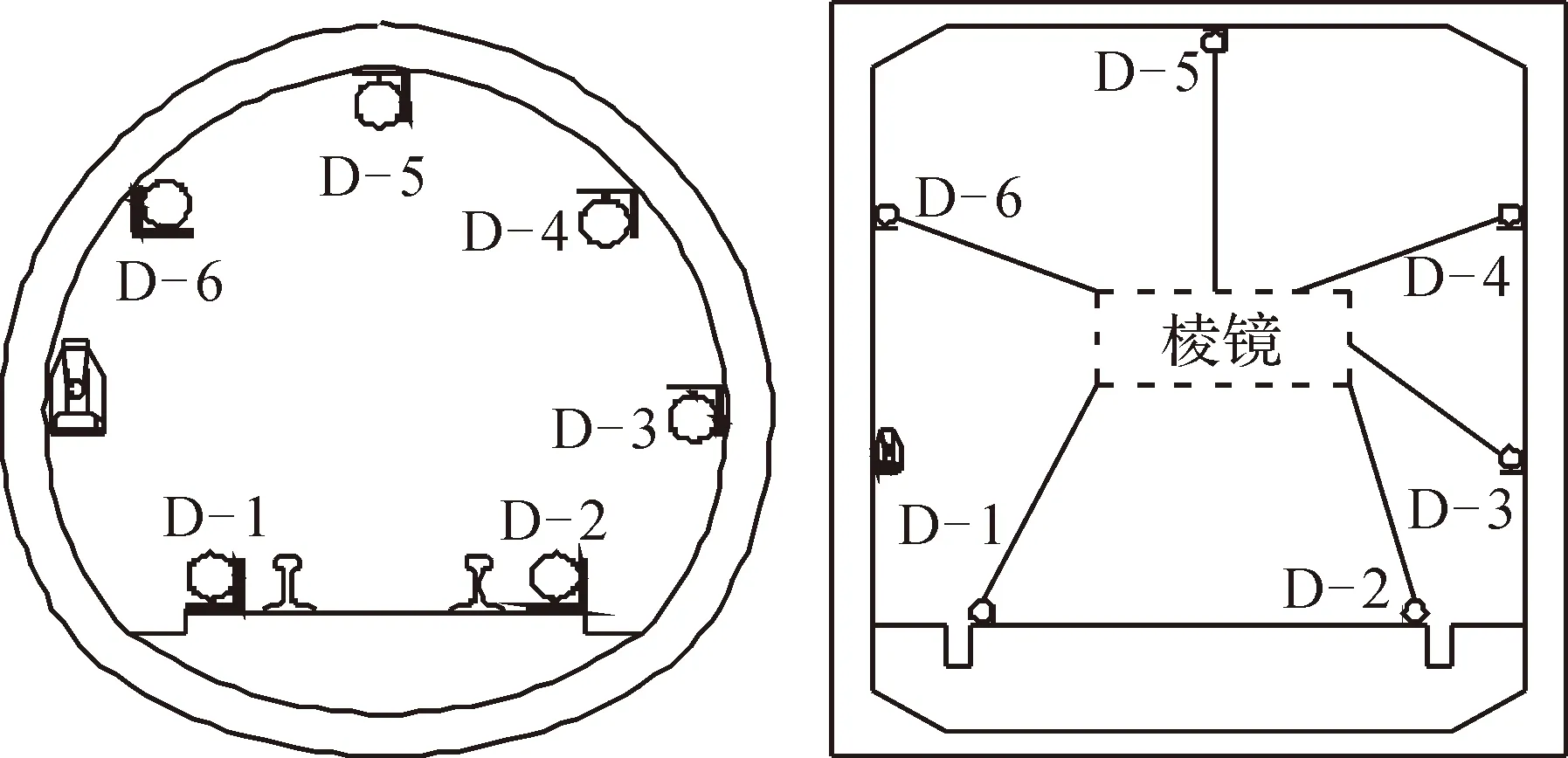
图3 盾构隧道断面测点布置图明挖隧道断面测点布置图
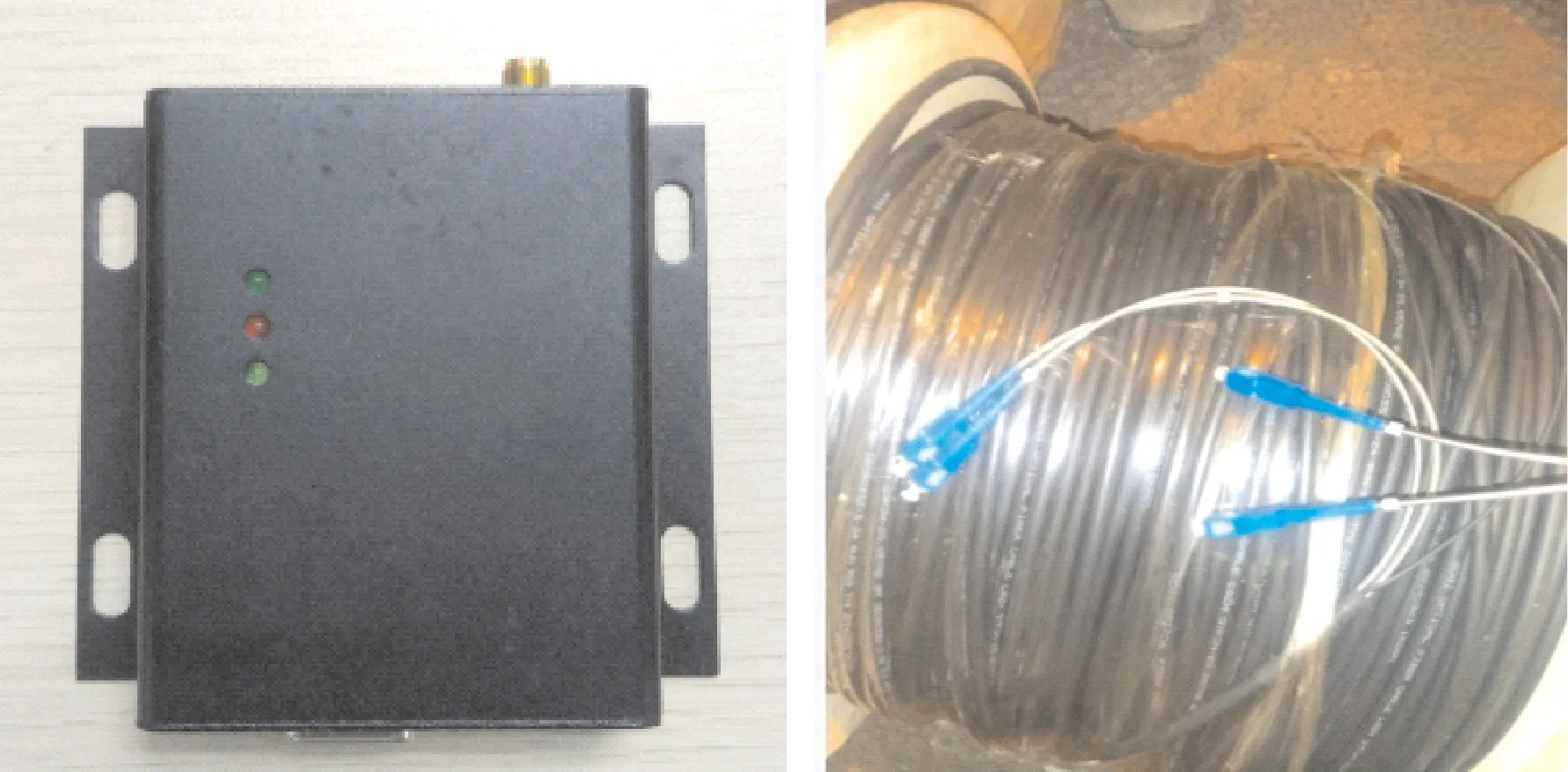
图4 通信控制系统
4. 南方SMOS监测系统软件
南方SMOS监测系统软件是一款专业实时自动监测软件,支持各主流品牌测量机器人,多种限差实时检核和报警,通过软件的控制和数据分析,利用实时差分改正技术,消除了现场无固定规律的气象条件和各种外界条件所带来的影响,使测量值更接近于真值,达到高精度实时显示各监测点的变形趋势。SMOS监测系统软件具有仪器参数远程检查及设置、电源管理和测站检查等功能,可确保监测系统稳定可靠运行。
1) SMOS监测系统软件支持多个监测任务同时运行(如图5所示)。
2) 通过实时测量已知点组的三维成果,软件自动计算所有实测已知点与理论数据的差分值,并将其实时配赋到每一个监测点,最大化地消除综合气象条件导致的不固定误差,从而得到最或是监测成果。监测数据曲线绘制功能可提供监测过程曲线,如监测量、监测量变化、监测量速率的时间过程曲线及进尺过程曲线,监测量、监测量变化、监测量速率的分布曲线等;同时还能将地面与地下监测变形量值进行关联分析,在地铁运营期起到地铁隧道结构保护作用(如图6、图7所示)。

图5 任务运行管理

图6 实时三维成果

图7 回归分析
二、技术难点问题及解决方案
地铁隧道是狭长形的空间环境,同时,地下列车一般以平均5 min左右的时间间隔车次在地铁隧道中高速运行。地铁环境的这些特点及保证地铁正常运营等因素的制约,使得自动变形监测系统在地铁变形监测中的应用遇到比其他工程中更多的技术问题。同时,这些制约因素也使得在地铁变形监测中,自动变形监测手段有着常规测量无法比拟的优越性。
南方SMOS自动监测系统可以在无人值守的情况下,全天24 h连续地自动监测,实时地进行数据处理、数据分析、报表输出、图形提供和自动报警等,完全可以在列车正常运行的情况下进行自动测量。
三、结束语
1) 项目所采用的6台索佳NET05AXII测量机器人一直运行良好,无论在精度还是在可靠性方面都满足长期精密监测的要求,为监测系统长期运行提供了基础保障。
2) 索佳NET05AXII测量机器人具有的目标照明和激光指向功能,能快速发现并照准目标,大大提高了安装调试的速度。
3) 南方SMOS监测系统特有的测量系统控制设计,考虑了多种异常状况的影响。
4) 严格的测量数据质量检查机制,从测量采集控制到测站点和控制点检查,为确保监测成果质量提供了有力保障。
5) 严密的数据处理技术模型消除了各种外界条件所带来的影响,使测量值更接近于真值,准确地反映出隧道结构的变形情况。
6) 远程通信控制系统的可靠性在长期自动化监测任务中对整个监测系统的可靠性至关重要。
全站仪自动化监测在地铁保护监测中已广泛使用,在实际监测过程中面临影响监测精度、系统可靠性和实施可行性等诸多问题。本项目过去一年半的监测工作证明,索佳NET05AXII测量机器人结合南方SMOS监测系统能克服长期运行中的各种可能问题,系统稳定可靠,自动化程度高,能够满足地铁隧道变形监测工作的需求。
测绘4.0:拓普康索佳应用方案专栏
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
法律方法(2022年2期)2022-10-20
学生天地(2020年5期)2020-08-25
中国外汇(2019年6期)2019-07-13
学苑创造·A版(2019年4期)2019-05-10
小读者(2019年24期)2019-01-10
三联生活周刊(2017年37期)2017-09-11
小天使·一年级语数英综合(2017年3期)2017-04-25
莫愁(2017年9期)2017-04-07
小天使·四年级语数英综合(2016年11期)2016-11-29
