
基于全景影像的测绘控制点寻点系统研发
2016-09-08 02:11杨军星邱冬炜
测绘通报 2016年8期
黄 鹤,杨军星,邱冬炜,赵 焰,姜 浩
(北京建筑大学测绘与城市空间信息学院,北京 102616)
基于全景影像的测绘控制点寻点系统研发
黄鹤,杨军星,邱冬炜,赵焰,姜浩
(北京建筑大学测绘与城市空间信息学院,北京 102616)
如今测绘地理信息行业蓬勃发展,基础测绘数据的使用与管理存在很大问题,各大测绘局售给用户的控制点的地理跨度往往很大,寻找控制点会消耗较多时间,控制点点之记数据难以具有时效性,现有的导航软件坐标系与控制点的坐标转换参数未知,用其导航不尽满意。本文基于全景影像开发了服务器端和手机端应用相结合的控制点寻点系统,使用PostgreSQL管理数据,利用手机的多种传感器,实现了控制点精确、快速导航,结合全景影像的优秀可视化效果使导航具有更好的用户体验。
全景影像;智能手机;最近点算法;控制点导航
测量控制点在城市测绘、空间技术、项目工程中是非常重要的基础数据,是国民经济的命脉。控制点往往埋设到视野开阔的位置,控制网更要覆盖整个项目区域,导致分散且不易查找。如今的点之记也只是粗略记录大概位置,控制点之间的地理跨度往往很大,随着时间的推移,点之记的标志也会逐渐模糊以致消失,致使控制点的寻找更是难上加难,给测绘工作带来了很多不必要的麻烦,浪费了许多宝贵时间。全景影像作为由相机直接拍摄并拼接而成的影像数据,可以360°自由查看某一地点任何方位的场景,在可视化方面可以说最接近实际场景。而如今的各大地图厂商显然没有将全景影像在导航领域的作用发挥出来,只是作为街景来提供一些景观浏览。而如今智能手机已相当普及,如果将全景影像与导航结合,由此形成一个全新的导航系统并应用到智能手机的话肯定会有其用武之地,在寻找控制点过程中可以提供重要的参考依据,实现控制点的快速、精确导航,也会为测绘工作节省很多不必要的时间,提高工作效率。
一、技术和方法
1. 全景相机
因为控制点作为基础数据,提供精度控制的作用,在一个项目中数据量很小,在空间位置上是一个个独立的分散点,所以不需要像Google、百度街景那样一米一个场景,需要测量车来专门进行数据采集,一个简易的便携全景相机就可以满足要求。目前主流的数码全景相机的成像方式基本分为三大类:折射式多镜头组合、折反射系统和旋转式扫描系统。多镜头组合型全景相机由一系列独立、固定的镜头组成,由多个相机拍摄不同方向的影像,再利用软件拼接为全景影像,该类型相机如LADYBUG等,作为车载相机可以配套GPS、INS的定位系统,拍摄全景的同时可以测得坐标。控制点一般位于视野开阔的地方,如山顶、山丘等,因此需要便携式全景相机,现今的设备有如谷歌的背包Cartographer,单反相机与旋转台的组合等。
本文的全景相机由6个不同朝向的GoPro运动相机组装而成,拍摄6张影像,使PTGui软件投影拼接,形成等距圆柱投影,最后使用Krpano全景制作插件进行分割、加工,制作出全景网页放到服务器或本地分享浏览,当寻找控制点的过程中设置一个距离阈值,接近控制点时会自动报警并显示控制点的全景,为寻找控制点提供依据(如图1所示)。
2. 控制点全景拍摄
为方便导航需要在控制点周围拍摄全景为导航提供依据,在距离控制点一定的范围内拍摄全景,根据用户不同需求与控制点所在的环境设定相应的阈值、方向、全景数量等,但应满足一定的规则。如埋设地点应有一张全景,控制点的四周在有道路的方向设定距离阈值,每60°拍摄一张全景,有房屋的方向可以不用拍摄,因为寻找控制点的过程中根本不会经过。如图2所示。

图1 全景相机与全景影像

图2 全景拍摄示例
3. 陀螺仪与方向传感器
为了用户更好的体验,打开全景时的指向应与手机的朝向相一致,手机转动时全景应转动相同的角度。如今的智能手机配备有多种传感器,如陀螺仪、方向传感器、GPS接收器、磁传感器等。利用这些传感器可以方便地控制全景的起始方向、旋转,为了使用户打开全景时其方向必须和用户手持手机的方向相同,首先通过磁传感器获取用户相对于北方向的朝向,然后将全景旋转到与用户相同的方向。具体做法是将全景的零方向与北方向重合,在全景中利用手机磁传感器获取手机朝向相对于北方向的方位α,最后将全景旋转α即可。
垂直方向的视野可以通过方向传感器来获取,然后旋转相应角度即可,并结合陀螺仪使用户旋转手机的同时,全景也相应地跟着旋转。此功能也可以用到古建筑遗址保护、工程建设、景区保护中,可以360°检测同一地点、同一场景随时间的变化。如在某条旧街拆除之前,对其进行全景拍摄,含有指南针和陀螺仪信息;重建后,可根据GPS位置找到之前的拍摄点,然后实现不同时空的互动。即使用者在之前拍摄的位置转动身体,同时看到真实世界和设备中的过去世界在相同位置的影像。如果加上谷歌立体纸盒功能则体验更加丰富。
二、系统研发
1. 最近全景搜索
用户手持移动设备进行导航时,需要实时监听用户位置并标注在地图上。天地图SDK的OverLay类提供了onLocationChanged方法可以实时监听用户位置并作出响应。当手机位置发生改变时立即搜索最近点全景显然没有必要,还会增加运算量,耗费移动设备电量,这对移动设备来说显然不适用,因此需设置一个导航效果选项,根据导航效果的高低来设置位置移动大小并搜索最近点,或者手动搜索。
目前主流的最近点算法如GeoHash、B树索引等针对海量数据可以大大减少运算量,提高效率,显然对于拥有海量数据大型控制点系统是很有必要的。但基层控制点的数量是很有限的,每个全景周围全景数目不超过10个,用户购买的控制点更少,显然对于如今配置过剩的移动设备来说这点运算量微不足道,复杂的算法更没必要,因此采用遍历的算法来搜索最近点。具体流程:获取当前位置p,min S设为最小值变量,全景位置序列为list
2. 数据组织
控制点点之记在原有数据的基础上添加全景影像及其位置属性,方便查询,为了保证数据的安全性,采用RSA不对称加密算法,保证用户购买的控制点数据安全传输。数据结构见表1。
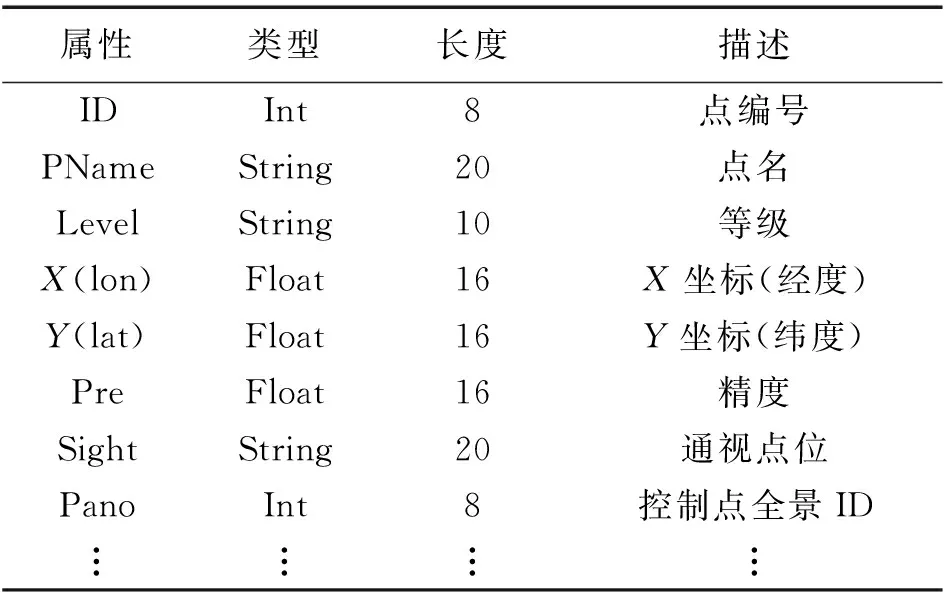
表1 点之记数据结构
3. 系统架构与功能实现
总体架构分为两部分:移动端和服务器端。服务器端总体架设在阿里云ECS,分3大模块,分别为API、应用门户站点管理、数据中心库,用户管理(包括权限、用户基本信息),测绘成果数据批量导入导出、数据编辑(插入、删除、更新、地图标记、全景录入、影像录入)等。移动App主要分6个模块,主要用于数据的查询和控制点的导入导出、控制点路线导航,实现控制点的快速、精确导航,如图3所示。
三、结论与展望
由于现今导航软件坐标系与地理坐标系的不统一,点之记给出的坐标又是粗略坐标,控制点的使用、寻找非常困难。针对此问题,测寻控系统充分发挥全景影像的优势,结合传统导航,在控制点管理、全景导航方面取得非常大的成功,解决了当下控制点使用过程中遇到的问题,提高了测绘工作效率,为信息化测绘提供了宝贵的经验。随着科技的发展,全景影像作为一种新的数据,将得到广泛应用,与传统测绘相结合,相信在将来的信息化测绘中将占据一席之地。

图3 系统架构与App导航
[1]张志乐, 郭鹏飞, 裘安秋. 组件式GIS技术管理测量控制点的系统设计[J]. 地理空间信息, 2011,9(5):20-22.
[2]蔡欣恩, 唐诗华, 王睿. 基于Google地图的测量控制点成果管理系统[J]. 地理空间信息, 2014,12(5):31-34.
[3]肖海红, 谢瑞, 王兰洲,等.GIS支持下的煤田大地测量控制点成果信息管理系统的设计与实现[J]. 测绘通报, 2015(9):117-121.
[4]李海亭, 彭清山, 王闪,等. 数字城市中的全景地图系统建设方法研究[J]. 测绘通报, 2011(4):71-73.
[5]季顺平, 史云. 多镜头组合型全景相机两种成像模型的定位精度比较[J]. 测绘学报, 2014, 43(12):1252-1258.
[6]ZHENGJY,SHIM.MappingCityscapestoCyberSpace[C]∥Proceedingsofthe2003InternationalConferenceonCyberwords.[S.l.]:IEEE,2003.
[7]YOYAMAK,LOGANR,ROSEWAYA,etal.GeographicLocationTagsonDigitalImages[C]∥ProceedingsofACMMultimediaConference.[S.l.]:ACM, 2003.
[8]LIS,HAYASHIA.RobotNavigationinOutdoorEnvironmentsbyUsingGPSInformationandPanoramicViews[C]∥ProceedingsofIEEE/RSJInternationalConferenceonIntelligentRobotsandSystems.[S.l.]:IEEE/RSJ,1998.
[9]ZHENGJY,ZHOUY,SHIM.SceneTunnelsforSeamlessVirtualTour[C]∥ACMConferenceMultimedia.[S.l.]:ACM, 2004.
[10]CHOJS,LEEYW,JUJG,etal.ImplementationofaSurveyedControlPointManagementSystemUsingCDMANetworks[C]∥2010 5thInternationalConferenceonEmbeddedandMultimediaComputing(EMC). [S.l.]:IEEE,2010.
Research and Development of Surveying and Mapping Control Point Location Tags System Based on Panoramic Image
HUANG He,YANG Junxing,QIU Dongwei,ZHAO Yan,JIANG Hao
10.13474/j.cnki.11-2246.2016.0272.
2016-05-25
北京建筑大学校级实践教学专项基金(J13-11);校级教育科学研究项目(Y11-29);住房和城乡建设部科技计划项目(2015-K8-050)
黄鹤(1977—),男,博士,讲师,研究方向为地球形状及重力场,室内导航定位技术及其应用等。E-mail: huanghe@bucea.edu.cn
P208
B
0494-0911(2016)08-0118-03
引文格式:黄鹤,杨军星,邱冬炜,等.基于全景影像的测绘控制点寻点系统研发[J].测绘通报,2016(8):118-120.
猜你喜欢
全球定位系统(2021年1期)2021-03-26
家庭影院技术(2020年11期)2020-12-28
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
英美文学研究论丛(2018年1期)2018-08-16
北京航空航天大学学报(2017年4期)2017-11-23
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
家庭影院技术(2017年12期)2017-02-06
中国工程咨询(2017年12期)2017-01-31
