
盾构姿态测量原理的比较研究及精度分析
2016-09-08 02:11姜留涛
测绘通报 2016年8期
姜留涛,翟 燕
(1. 陕西铁路工程职业技术学院,陕西 渭南 714000; 2. 华北水利水电大学,河南 郑州 450052)
盾构姿态测量原理的比较研究及精度分析
姜留涛1,翟燕2
(1. 陕西铁路工程职业技术学院,陕西 渭南 714000; 2. 华北水利水电大学,河南 郑州 450052)
对国内外盾构姿态自动测量系统进行了比较和总结,对盾构姿态的参数和姿态测量的原理进行了梳理,提出了盾构中心坐标偏差和切线偏差的计算方法,并对地铁盾构施工过程中,各个阶段的施工测量精度进行了具体分析和总结。
盾构施工;姿态测量;原理;测量精度
随着我国城市轨道交通建设进入快速发展时期,城市地铁因集约化、高效率、大容量、低污染等特点也迎来了前所未有的发展机遇和建设热潮。近期,我国40余座城市的轨道线路规模将超过3400 km,投资总额将超过万亿。作为城市地铁施工的主要施工方法和手段,有着180年历史的盾构施工技术也发展迅速,现代盾构掘进机(TBM)中高新技术和自动化水平越来越高,采用了如控制、遥控、测量、探测、导向、通信技术等高新技术。其中,盾构自动测量导向系统是其关键技术。
一、盾构姿态自动测量导向系统基本原理
盾构自动测量导向系统是集测量技术、激光传感技术、计算机技术、无线通信技术、机械电子技术于一体的综合系统,由多种不同类型的精密传感器组成,能够准确实时测量盾构机的姿态和位置,并计算显示出盾构机相对设计掘进中心线之间的偏差和偏角。
目前国内外的盾构姿态测量系统有3种模式,分别是:全站仪+激光靶 (laser target)的激光导向模式(代表系统有德国VMT公司的SLS-T系统、英国ZED、德国TACS公司的ACS系统、上海米度的MTG-T系统);全站仪+两棱镜+倾斜仪模式(代表系统有德国PPS、日本演算工房的ROBOTEC系统、上海米度系统、上海力信的RMS-D系统);陀螺仪全站仪模式(日本东京计器株式会社开发的TMG-32B系统和Tellus导向系统)。
3种系统中,激光靶系统精度高,智能化程度高,成本高;棱镜系统精度稍差,但维修方便,成本低;陀螺仪全站仪模式依赖陀螺仪精度和人员素质,国内还没有普及。
1. 盾构姿态需要测量的参数
盾构机的姿态指盾构机前端刀盘中心(简称“刀头”或“切口”)的三维坐标和盾构筒体中心轴线在3个相互垂直平面内的转角等参数。盾构机姿态的主要参数有以下9个:刀盘切口里程、刀盘切口方向偏差、刀盘切口高程偏差、盾尾方向偏差、盾尾高程偏差、盾构滚动角、盾构俯仰角、盾构方位角、环号,如图1、图2所示。
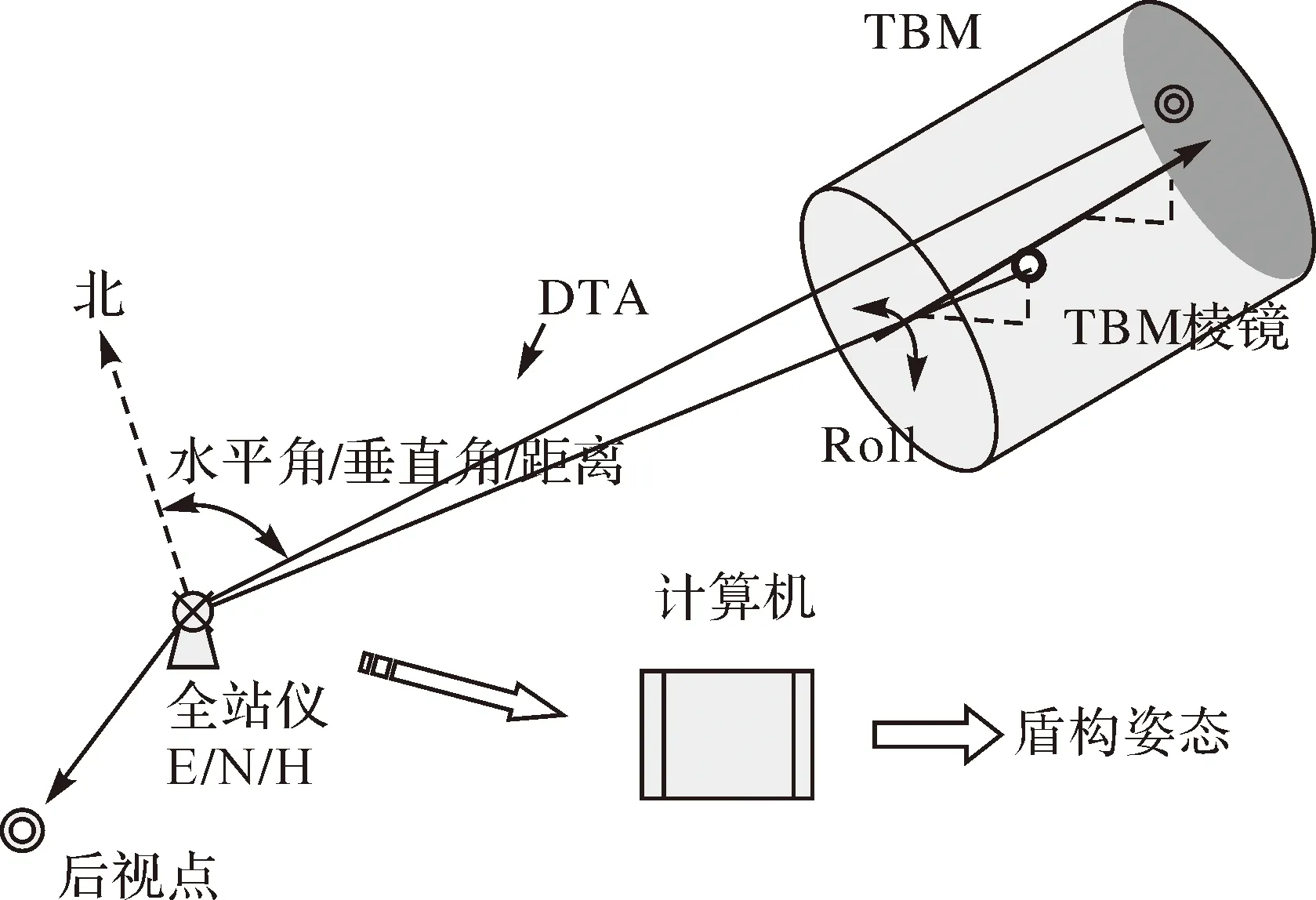
图1 盾构姿态测量系统示意图

图2 盾构机刀盘滚动角示意图
2. 测量姿态时的原理及公式
(1) 水平角和仰俯角的确定
激光靶系统是通过计算激光与CCD轴线之间的夹角(水平方向β,垂直方向γ),然后对比激光在绝对坐标系的方位角和竖直角,从而计算出盾构机的水平角和仰俯角。如图3所示,设p(xp,yp)为激光靶上的激光点坐标,则
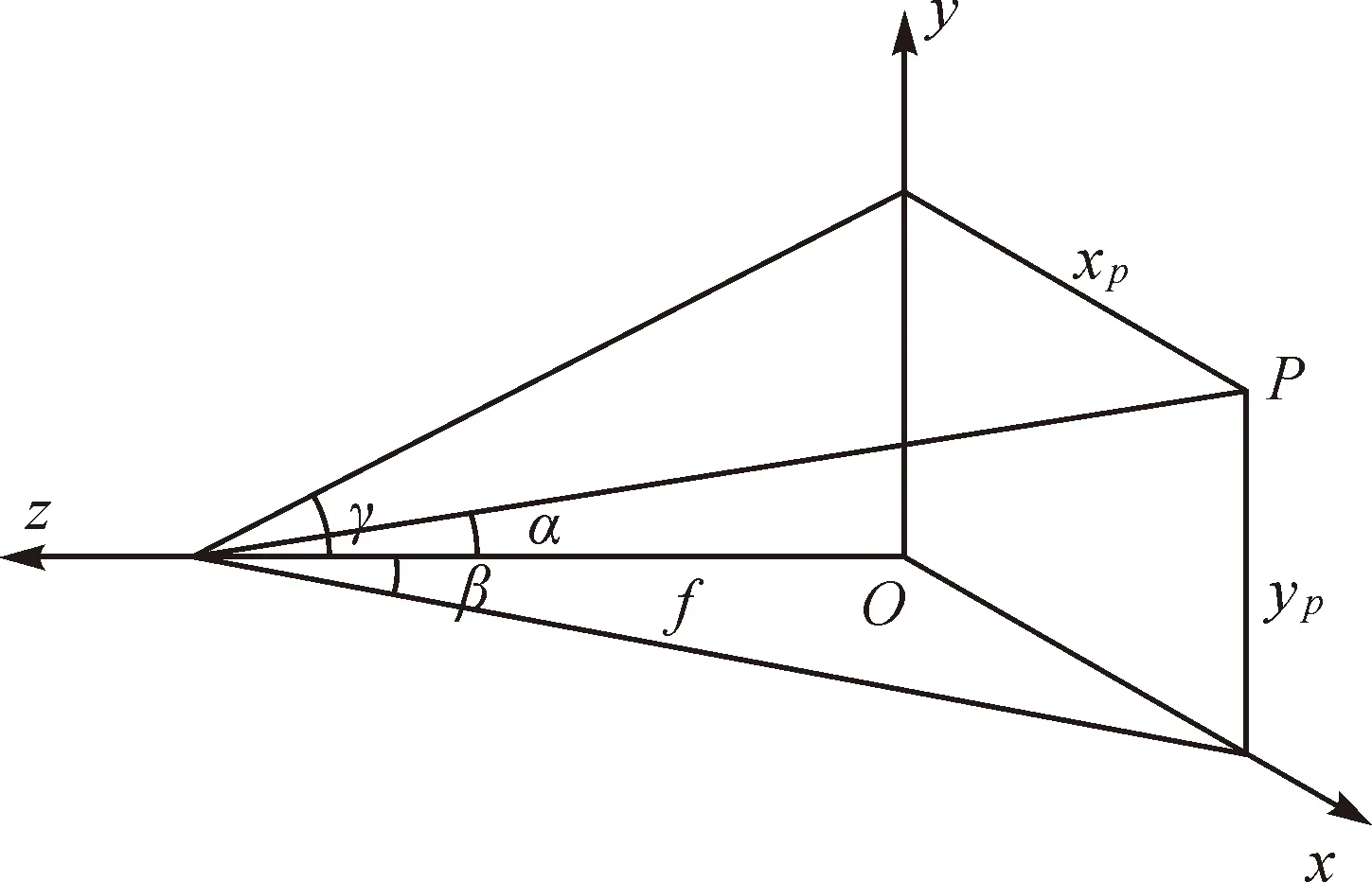
图3 激光靶系统中激光与CCD轴线的关系
(2) 切口中心坐标
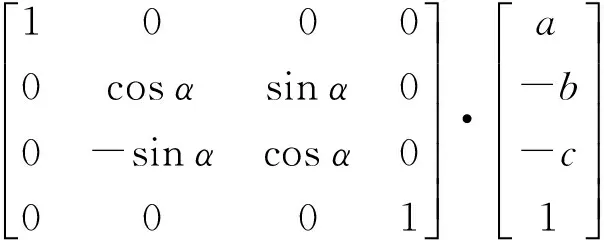
如图4、图5所示,因激光靶中心的大地坐标由导线上的全站仪测得,盾构机的滚角、仰俯角、水平角可以由倾斜仪和激光靶数据测得,激光靶坐标系中切口中心的坐标为(a,-b,-c),激光靶中心大地坐标为(x0,y0,z0),通过坐标系的旋转和平移,可以求得切口中心在大地坐标系下的坐标,即


(3) 盾构中心坐标计算
直线段盾构中心和线路中心重合,盾构姿态相对容易获取。在平曲线段(圆曲线段和缓和曲线段),盾构中心轴线和线路曲线的切线方向重合,小半径及盾构始发时会出现偏离值的矢距,这也是曲线段盾构姿态测量的关键。

图4 激光靶坐标系在曲线下的模型
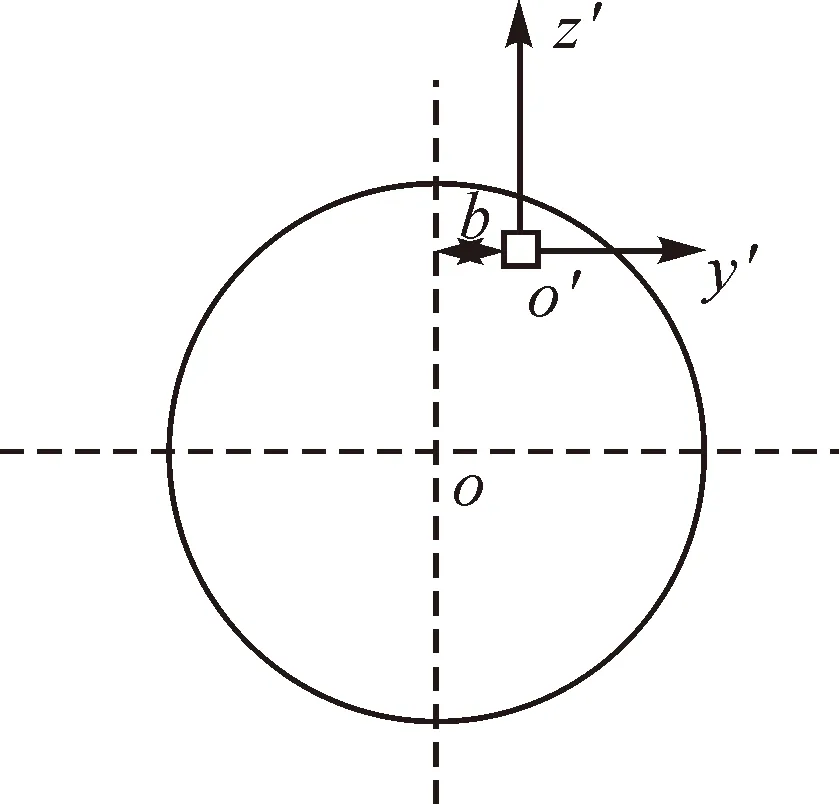
图5 激光靶坐标系后视图
根据激光靶到盾构中心M的相对平面距离(c,d)、激光靶中心的大地平面坐标(x0,y0)及切口中心坐标(x,y),可以求出盾构中心坐标
式中,曲线右偏取+,左偏取-。

式中
经过M点的理论坐标和实测坐标进行比较,即可求出盾构中心偏移的矢量ΔM,即
通过对比矢量的大小来判断盾构中心偏离线路中心的距离,从而进行盾构姿态修正和相关操作。
(4) 盾构姿态之切线方向
盾构机在曲线段施工的理想状态是其盾构中心轴线与曲线切线方向保持一致。盾构中心轴线方位角可以根据盾构中心坐标和切口中心坐标反算求得αO-M,而曲线切线方位角可以根据其与过ZH点的切线方位角之间关系求得,其差值即为盾构中心线的切线偏差,即
δ=αZH切线±βi-αO-M
需要注意的是,此时的盾构偏角δ为实测盾构中心轴线与该曲线的理论切线之间的偏角,偏角δ真实反映了盾构机偏离理论水平曲线的偏差。它不同于激光靶的水平偏角β,β角是指全站仪前视与激光靶之间相对偏差,但是在直线段盾构机施工时水平偏角β可以等同于盾构偏角δ。
二、盾构施工及姿态测量的精度分析
地铁区间隧道的贯通误差中,横向贯通测量中误差限差为50 mm,高程贯通测量中误差限差为25 mm。贯通误差主要来源于地面控制测量误差、竖井联系测量误差、进洞洞口中心坐标误差、地下导线测量误差、盾构姿态测量误差5个方面。


3) 影响地铁贯通精度的主要是横向贯通误差,若n为设站数,mβ为测角中误差,L为隧道总长,mα为起始方向中误差,则横向误差公式为
4) 盾构施工误差是地铁隧道贯通误差的重要组成部分,其取决于盾构结构的形式、盾构震动、管片位移、管片旋转、系统仪器类型精度和状态、后视定向次数、测量环境(温度、湿度、粉尘等)、测量窗口大小、激光靶(棱镜)到刀盘切口的距离等。相关规范要求盾构机盾尾偏差小于10~15 mm,刀盘切口偏差小于20~25 mm。而搬站、导线复测前后,盾构姿态可能有所改变,一般相差20~30 mm属于正常范围。若发现姿态数据短时间内异常变化大于50 mm或跳动大于30 mm以上,应及时调整盾构位置和姿态的参数。
5) 盾构导向系统中仪器精度要求
由于盾构姿态数据计算的精度要求较高,包括横竖向偏差、仰俯角、滚转角等数据精度要求,故对激光靶和全站仪相关精度指标也应做出以下要求,见表1。

表1
三、结束语
1) 盾构施工时除盾构位置和姿态自动测量系统外,还应加入人工测量的数据、推进油缸的状态参数及地下土层的特性参量,共同计算分析盾构机的掘进趋势。
2) 对于盾构机俯仰角的参数测量,可以根据高程控制网和全站仪三角高程测量的方法,结合激光靶的倾斜仪数据进行综合求得,特别在掘进竖曲线时应充分考虑竖曲线的坡度和预拱度。
3) 在有油缸铰链的盾构机模式下进行姿态计算时,需要考虑其切口中心坐标值与激光靶中心坐标的相关性。
4) 为了减少由于盾构自转所产生的管片拼装困难,盾构旋转量应控制在±30以内。盾构自转角度大于10mm/m或盾构机位置偏离大于50mm时,可能发生盾构偏差超限、纠偏困难,危及盾构与地铁隧道施工安全。
5) 盾构姿态人工测量每周不少于1次,最长掘进距离不应大于150m。盾构掘进至离洞口封门结构100m时,必须作一次盾构推进轴线的方向传递测量,以逐渐调整盾构轴线。盾构施工60m以后,隧道结构已经稳定,在此设置地下控制点。导线点的稳定情况,通过重复测量确定,一般不少于3次。
[1]潘明华. 盾构自动导向系统的研究与实现[D]. 武汉:华中科技大学,2005:26-28.
[2]边大勇,卢小平,李永强,等. 地铁盾构区间施工测量技术研究[J]. 测绘通报,2011(4):51-54.
[3]徐然. 地铁盾构智能导向系统研究[D]. 上海:同济大学,2008:10-11.
[4]郭沈凡. 盾构隧道精密定位导向技术的研究 [D]. 南京:河海大学,2005:51-52.
[5]李惠平.盾构姿态的模糊控制方法[J]. 同济大学学报,2003(7):825-826.
[6]薄志义,王坡. 盾构机轴线方位角解算原理研究[J]. 北京测绘,2006(3):18-21.
[7]王超领. 地铁盾构机掘进实时姿态定向测量的研究[J]. 隧道建设,2007(6):33-35.
[8]潘明华,朱国力. 盾构机自动导向系统的测量方法研究[J]. 施工技术,2005(6):34-36.
[9]毕小伟. 盾构机位姿测量系统的关键技术研究[D]. 上海:上海交通大学,2010:12-13.
[10]中华人民共和国住房和城乡建设部.盾构法隧道施工与验收规范:GB50446—2008[S].北京:中国建筑工业出版社,2008.
Comparative Study of Shield Posture Measuring Principle and Accuracy Analysis
JIANG Liutao,ZHAI Yan
10.13474/j.cnki.11-2246.2016.0263.
2015-10-26
陕西铁路工程职业技术学院科学研究基金
姜留涛(1982—),男,硕士,讲师,从事测绘类教研和管理工作。E-mail:chxbgs@126.com
P258
B
0494-0911(2016)08-0086-03
引文格式:姜留涛,翟燕.盾构姿态测量原理的比较研究及精度分析[J].测绘通报,2016(8):86-88.
猜你喜欢
商界评论(2022年1期)2022-04-13
建材发展导向(2021年11期)2021-07-28
学生天地(2020年6期)2020-08-25
学生天地(2020年3期)2020-08-25
模具制造(2019年7期)2019-09-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
中国工程咨询(2015年9期)2015-02-25
中国新技术新产品(2014年6期)2014-03-25
中国工程咨询(2012年1期)2012-02-13
