直立式防波堤桶式结构浮运安装
2016-09-07 01:58:21曹义国夏俊桥中交第三航务工程局有限公司上海200032
中国港湾建设 2016年8期
曹义国,夏俊桥(中交第三航务工程局有限公司,上海 200032)
直立式防波堤桶式结构浮运安装
曹义国,夏俊桥
(中交第三航务工程局有限公司,上海200032)
连云港徐圩港区直立式防波堤工程采用一种新型桶式结构,为了解决该结构的海上运输与安装,节省施工费用,施工中采用水上气浮拖带运输,通过排气、排水实现负压下沉,保证了新型桶式结构的顺利实施。在桶式基础结构气浮拖运和负压下沉过程中,通过自动控制系统控制桶式基础结构的姿态和沉放精度,保证了工程质量。
直立式防波堤;桶式结构;浮运安装;负压下沉;自动控制
1 工程概况
连云港徐圩港区直立式东防波堤全长4.2 km,由195个桶式结构插入淤泥形成,该区域泥面标高约-6.0 m(基于当地理论最低潮面,以下同),表层淤泥厚7~10 m,桶底进入表层淤泥层以下的下卧粉质黏土层1~2 m,上筒预制顶标高+3.5 m[1]。
桶式结构是一种无底有顶的单桶多舱钢筋混凝土结构,每个桶式结构由下层多舱桶体和上层2个圆筒共同组成,总重2 600~3 100 t。下层桶体呈长圆形,由中间矩形和2个半圆组成,长30 m,宽20 m,高8.5~11 m,通过隔墙分为9个格舱,下桶外壁底部4 m高度范围内墙厚300 mm、上部墙厚400 mm,隔墙墙厚300 mm,下桶顶板厚600 mm。上层2个φ8.9 m圆形筒体坐落在下层桶顶板上,高度9~10 m,壁厚400 mm,2个圆筒间距1 100 mm。
桶式结构安装时,长边方向垂直于堤轴线布置。设计要求桶式结构单元施工控制标准为:平面位置偏差±30 cm,标高控制偏差±30 cm,垂直度1%。
本海域年平均海平面+2.97 m,年平均高潮位+4.84 m,年平均低潮位+1.18 m,设计高水位+5.41 m,设计低水位+0.47 m。
2 桶式结构气浮和负压下沉验算
2.1气浮机理及气浮稳定验算
桶式结构倒扣入水后,向桶内充气,桶内气体处于受压状态,压缩气体将桶内的水面向下压,使桶内外水面产生一个高度差。桶内气体的压力强度等于桶内外水面高度差的水柱压力,这个压力在桶内向下作用于水面,使桶内的自由水面低于桶外的自由水面;侧向作用于桶壁,对于整个桶壁合力为0;向上作用于桶顶,将桶体顶起浮于水面。桶体处于静稳态时,桶内气体对桶顶向上作用力与桶壁浮力之和等于桶体的重量,即桶壁和桶内气体排开水体的重量等于桶体的重量。
本工程中气浮体采用的是无底有顶的单桶多格舱钢筋混凝土结构,当气浮桶式结构在波浪、潮流等外力作用下发生倾斜时,结构重心高于浮心,结构重量会产生倾覆力矩。而桶体格舱内封闭气体,一侧会随桶体升高,气体体积膨胀,气压下降,对顶板压力减小;另一侧随桶体下沉,气体受压缩,气压升高,对顶板压力增加,此时,各个格舱提供的浮力会发生明显的变化,浮力形心点运动,因而形成一定的稳定力矩,只要稳定力矩大于倾覆力矩,气浮桶式结构将是稳定的,见图1。
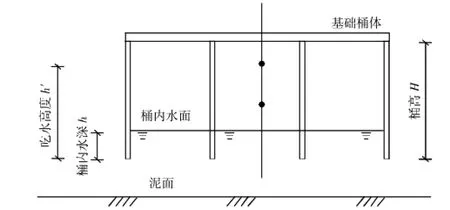
图1 桶式结构气浮示意图Fig.1 Pneumatically floated bucket-based structure
新型桶式基础矩形断面结构n舱气浮稳定判别通式[2],根据模型试验修正形成计算公式(1)。

式中:n为结构单元的格舱数;ρ为定倾半径;YG为结构重心位置;YC为结构浮心位置;YG-YC为结构重心到浮心的距离。
根据公式(1)推导出本工程气浮桶体定倾高度m为:

式中:ρ为定倾半径;α为重心到浮心距离;m为定倾高度。
根据本工程气浮拖运的海况条件,考虑安全因素,当m>0.6时,气浮浮游稳定;同时还需满足下桶体顶部的干舷高度≥80 cm[3]。
以下桶高10.15 m,上筒高9.95 m的桶式结构为例,计算其气浮拖运施工参数见表1。
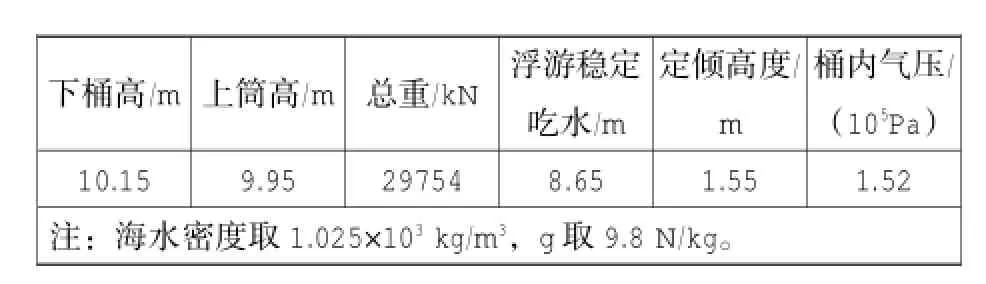
表1 桶式结构气浮拖运施工参数计算结果Table 1 Calculated results of parameters for floating transportation of bucket-based structure
2.2桶式结构负压下沉验算
桶式结构下沉则通过排气、排水、抽真空形成负压,在自重及负压的作用下,克服土体阻力下沉。第一阶段为排气自重下沉。打开桶体上方的排气排水阀门,桶内气体排出,桶式结构在自身重力的作用下入泥下沉,通过调节排气速度控制下沉速率,下沉过程中发生倾斜时,通过调节不同格舱排气量将桶体调节至水平状态,直至桶体结构自重和土体阻力平衡,结构停止下沉为止。第二阶段为抽水抽气负压下沉。当桶体内的气体全部排出后,利用潜水排污泵从抽水孔中将桶内水体抽出,结构继续下沉;在无水可抽时,通过抽气形成负压加力。
本工程土层分部相对较均匀,根据设计要求,桶式结构穿过表层淤泥层后进入下层粉质黏土层1~2 m,下沉需要克服土体摩阻力及端阻力。表层淤泥层流塑,压缩性极高,其下粉质黏土层主要由黏土、粉质黏土组成,可塑。
为了确定土层的摩阻及端阻系数,通过现场1∶6比尺的桶式结构模型下沉试验,结合原状土室内试验结果,经分析论证各土层的摩阻及端阻系数取值见表2。
各土层厚度按桶式结构附近钻孔取值选取,施工潮位取+3.0 m,潜水排污泵和真空泵分别能达到的真空度为30%和90%,按以上参数计算典型桶式结构下沉力和阻力,结果见表3。

表2 土层摩阻及端阻系数取值表Table 2 Frictional resistance of soils and end resistance coefficient
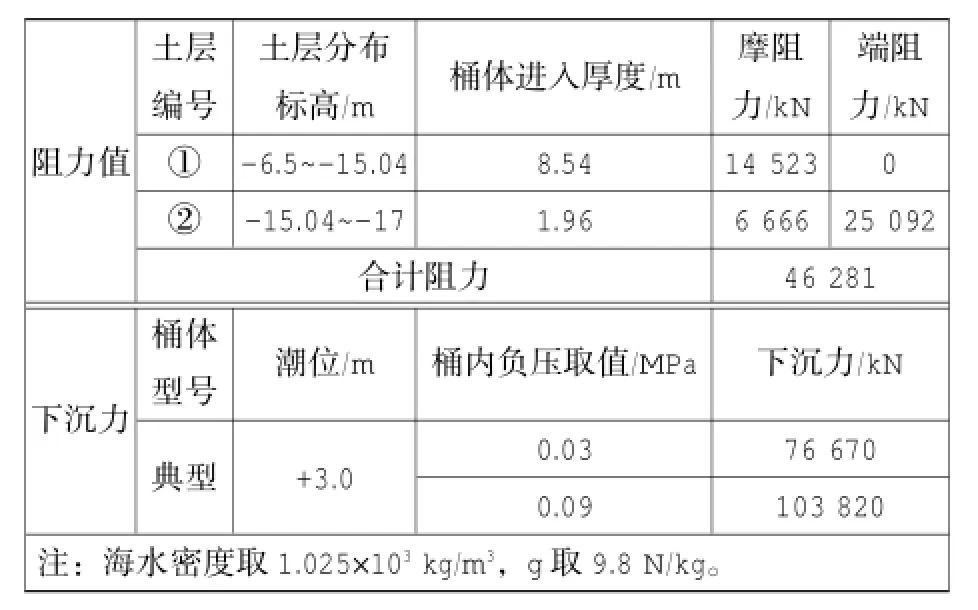
表3 典型桶式结构下沉受力计算结果Table 3 Calculated results of forces on typical bucketbased structure being lowered down
根据计算结果,采用潜水排污泵下沉力与阻力的比值为1.66,使用真空泵下沉力与阻力的比值达到了2.24。按类似工程经验[4],当下沉力与阻力比大于1.5时,可顺利下沉。本工程进行工艺设计时每个格舱均设置潜水排污泵,为了保证桶式结构下沉到位,使用了2个真空泵,1个真空泵与4个格舱并联,另一个真空泵与其他5个格舱并联。
3 桶式结构浮运安装工艺
3.1施工工艺流程
桶式结构浮运安装工艺流程:施工准备→半潜驳运输桶式结构至下潜坑定位→半潜驳下潜→桶式结构排气下潜→关闭阀门继续下潜→桶式结构气浮→气浮拖带→桶式结构定位→排气下沉→排水负压下沉。
3.2施工准备
半潜驳靠泊预制厂出运码头,桶体气囊搬运上船后,在桶顶安装自动控制操作平台,将桶体每个格舱气管、水管与平台上相应的管道、泵阀相连接。准备就绪后由半潜驳运输至下潜坑通过GPS进行抛锚定位,拖带桶式结构的起重船与半潜驳对接定位抛锚,连接桶式结构和半潜驳四角系船柱上的控制缆绳,连接起重船与桶式结构之间的拖带缆绳,操作人员检查管道及阀门连接的情况。
3.3桶式结构气浮
根据半潜驳抽排水性能不同,提前下潜确保潮水涨至平潮时拖带出驳。下潜前,确认排水、排气阀门保持打开状态,半潜驳开始第一次下潜,至桶体吃水0.8 m左右时停止下潜。下潜过程中检查各阀门排气是否正常,如发现管道堵塞情况应及时处理。当气体排放完成后关闭所有水、气阀门。
阀门关闭后控制缆绳人员就位,实施第二次下潜。第二次下潜时潮位不得低于施工潮位,下潜过程中安排专人观察桶体是否存在漏气现象,控制室人员观察气压变化,待桶体下潜至吃水7.5 m时停止下潜,拉紧拖带船舶与桶体拉环之间的缆绳,充气船靠近桶体,连接充气船与操作平台之间的气管。而后继续下潜至桶体浮游稳定吃水,桶内各格舱控制充气至浮游稳定气压,桶体浮起,收紧四角控制缆绳,防止桶体撞向半潜驳。
3.4气浮拖带
气浮稳定后,开动起重船锚机缓慢将桶式结构移出半潜驳,移动过程中缓慢加力,同时收放半潜驳塔楼上与桶体连接的缆绳,控制桶式结构,确保起重船缓慢并平稳地将桶式结构牵出半潜驳,拖带工艺图见图2。

图2 拖带工艺图Fig.2 Diagram of towing of pneumatically floated bucket-based structure
待结构完全移出半潜驳后,桶式结构上的施工人员将4根控制缆松开,由半潜驳上的人员收回,而后拖带起重船拖运基础结构移位,缓慢地驶向安装基槽,移动过程中测量人员通过自动定位系统实时报告桶体位置,指挥人员根据测量数据控制桶体在基槽内移动。
拖航过程中通过充/排气保持桶体浮游吃水,拖航速度不大于2 kn。安排2条交通船在两侧观察吃水深度,并随时报告操作平台调度人员,调度人员根据平衡状况指挥操作人员进行人工干预调平。
定位船提前就位,待桶式结构距离安装位置200 m时,定位船通缆到桶体,由拖带船舶和定位船共同移动桶体。
3.5定位下沉
桶体气浮运输到距离安装的位置10 m时开始精确定位,定位采用起重船和定位驳船共同完成。精确定位时,测量人员观察自动测量系统数据实时报告桶体位置,指挥人员根据测量数据指挥定位船、起重船控制缆绳移位,定位时首先将桶体移动到相对轴线的正确位置,然后向已经安装好的桶体移动,当桶体在预定安装位置10 cm以内时,拉紧锚缆,确保桶体位置基本固定,开始下沉作业。
3.6排气下沉
当桶体定位确定无误后,操控自动化控制系统打开排气阀门,在自重作用下桶体开始下沉。由悬浮状态下沉至泥面上30 cm后,关闭排气阀门,停止排气,测量人员再次通过GPS精确定位并检查桶体垂直度,确认满足设计要求后,再次打开阀门排气,最终入土下沉。
由于海床面的高差及土质不均,桶体入土下沉会产生倾斜位移。通过测倾仪监控侧倾状况,如发现超过要求,关闭下沉较大侧格舱的排气阀门,同时观察桶体的平衡状况,待桶体平衡后,再次打开全部排气阀门进行排气下沉,确保桶体顺直平稳地完成第一阶段下沉。
3.7排水负压下沉
完成上述工作后,根据桶内水位情况启动排污泵,进行负压下沉,连续观测桶壁水位刻度线,随时反馈,当桶体在0.5 h内下沉量不超过10 cm时或纠偏困难时开启真空泵。当下沉倾斜超过要求时,暂停下沉较大一侧格舱的水泵(或真空泵),下沉较小的一侧继续工作,直至桶体下沉处于均衡状态,其后继续负压下沉作业。作业通过操作平台阀门进行控制,随时调整各台泵开关,确保桶体的平衡下沉。当排污泵出口处无水排出并有泥浆出现,关闭各排污泵,校核下沉深度达到设计要求后下沉作业完成。
4 安装控制措施
4.1气象海况
持续收听收看海洋天气预报,跟踪气象信息,半潜驳下潜并实施气浮作业应确保在较好的海洋状况下进行,预知风力可能达到6级或波高可能超过1 m情况时不可实施下潜气浮作业。
4.2气密性
桶体气密性关系浮运安全,在不同施工阶段检查和采取措施保证桶体气密性,出运前检查桶体本身是否存在裂缝、破损、蜂窝等缺陷,管道安装完毕后关闭底部阀门,进行试验充气检查阀门和管道是否存在漏气,桶体下潜到吃水7.5 m时对周边进行详细查看,检查周边是否存在水泡,监听是否存在漏气声音。当发现问题时应及时处理,保证桶体安装全过程的气密性。
4.3桶体控制
桶体位置由测量人员持续跟踪实时定位系统,随时报告指挥调度。桶体出驳前带缆工人通过收放桶体四角的控制缆绳保持桶体处于半潜驳中心,防止桶体偏位过大碰撞半潜驳。出驳后通过收放桶体后侧2根缆绳进行控制,桶体前侧由起重船收放缆绳控制,起重船起锚时如风浪过大会导致桶体飘移,此时需提前预判由锚艇拖带控制起重船防止桶体跑位。
4.4桶体平衡
桶式结构气浮和下沉过程中测量人员密切跟踪桶体四角GPS高程,判断桶体倾斜程度,高差超过10 cm时通知指挥调度和操作人员,气浮阶段操作人员通过对不同格舱充气、排气手段进行调平,下沉阶段通过格舱间排气、排水差异进行调平。
4.5偏差控制
安装位置误差由测量系统观测、定位船舶缆绳控制调节,入土前后和最后阶段垂直度是控制的关键,桶体靠近泥面时进行精确调整,入土30 cm时进行再次调整,下沉最后1 m时提高调整频率,确保桶体下沉最后的垂直度。
4.6安装效果
截止目前,195个桶式结构已经顺利安装完成,机构单元平面偏差、桶体间距、垂直度等均满足设计要求。具体如下:
1)安装平面偏差测点数据合格率≥93%,桶体间距测点数据合格率≥95%,高程偏差测点数据合格率≥90%,桶底未达到设计预定底标高的桶式结构,经人工割除排水管道潜水工具探摸,发现盖板均已经抵达泥面。
2)对防波堤两侧的基底海床面进行监测,未发现明显的冲刷,堤头冲刷在堤身长度较短时不明显。
3)目前桶体累计沉降<8 cm,累计位移<3 cm。
5 结语
桶式结构作为一种新型的插入式单桶多舱结构,具有节约材料、造价低、绿色环保、施工快捷等优势。通过本工程的实施,获得专利2项,分别为“一种桶式防波堤基础桶体的搬运及安装工艺”和“一种单桶多舱结构气浮和下沉施工自动化控制装置”。关键技术的日趋成熟与稳定为后期工程应用奠定了基础,也为该结构推广到围堤工程、码头驳岸工程、风电基础、桥梁基础等领域提供了技术支持。
[1]中交第三航务工程勘察设计院有限公司.连云港港徐圩港区直立式结构东防波堤工程初步设计[R].2012.
CCCC Third Harbor Consultants Co.,Ltd.Preliminary design of vertical structure for the east breakwater for Xuwei Port Area in Lianyungang[R].2012.
[2]李武,魏冰.桶式结构气浮稳定计算方法[J].中国港湾建设,2016,36(3):16-18.
LI Wu,WEI Bing.Air floating stability calculation of bucketbased structure[J].China Harbour Engineering,2016,36(3):16-18.
[3]JTS 167-2—2009,重力式码头设计与施工规范[S]. JTS 167-2—2009,Design and construction code for gravity quay [S].
[4]祝业浩,倪国平,吴凤亮.防波堤箱筒型基础结构气浮拖运与负压下沉工艺[J].中国港湾建设,2005(5):40-43.
ZHU Ye-hao,NI Guo-ping,WU Feng-liang.Technology for towing of pneumatically floated cylindrical substructures and installing with negative pressure for breakwaters[J].China Harbour Engineering,2005(5):40-43.
Floating transportation and installation of bucket-based structure for upright breakwater
CAO Yi-guo,XIA Jun-qiao
(CCCC Third Harbor Engineering Co.,Ltd.,Shanghai 200032,China)
A novel bucket-based structure is used in the construction of the Xuwei upright breakwater in Lianyungang.In order to resolve the marine transportation and installation problem and save construction cost,the pneumatically floated bucketbased structure is towed by tugboats and installed with negative pressure,thus ensuring the smooth transportation and installation of the bucket-based structure.According to process requirements,the automatic control system is used to control the rise and lowering of the bucket type structure with correct positioning and accuracy during the towing of the pneumatically floated bucket-based structure and the installing of the bucket-based structure with negative pressure to ensure the quality of the works.
upright breakwater;bucket-based structure;floating transportation and installation;negative pressure lowering; automatic control
U656.2
A
2095-7874(2016)08-0058-04
10.7640/zggwjs201608014
2016-02-29
曹义国(1972— ),男,安徽安庆市人,高级工程师,港口及航道工程专业。E-mail:caoyiguo@126.com
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:36:58
水上消防(2021年4期)2021-11-05 08:51:28
海洋通报(2020年6期)2020-03-19 02:10:34
建材发展导向(2019年10期)2019-08-24 06:24:52
中国港湾建设(2017年11期)2017-12-19 12:27:11
海洋工程装备与技术(2017年5期)2017-03-05 09:49:39
江南诗(2015年3期)2015-06-01 17:17:00
水利水电科技进展(2014年2期)2014-10-17 03:22:06
河南科技(2014年22期)2014-02-27 14:18:13
电子设计工程(2014年17期)2014-02-27 12:00:03