
螺旋桨四象限水动力性能数值计算
2016-09-07 08:58:49张文璨董国祥陈伟民杜云龙任海奎
上海船舶运输科学研究所学报 2016年1期
张文璨,董国祥,陈伟民,杜云龙,任海奎
(上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135)
螺旋桨四象限水动力性能数值计算
张文璨,董国祥,陈伟民,杜云龙,任海奎
(上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135)
采用求解RANS方程的方法并运用计算流体力学(Computational Fluid Dynamics, CFD)软件Fluent,对荷兰MARIN船模水池B系列螺旋桨的敞水四象限水动力性能进行CFD数值模拟;同时,将数值模拟结果与B系列螺旋桨敞水四象限试验图谱进行比较。结果表明,计算误差较小,验证了计算策略的正确性,也为后续进行螺旋桨四象限水动力性能研究打下了基础。
B系列螺旋桨;四象限;水动力性能;数值模拟
0 引 言
敞水桨四象限(前进中正车、前进中倒车、后退中正车、后退中倒车)水动力性能数值模拟是当前螺旋桨计算流体力学(Computational Fluid Dynamics, CFD)研究热点,但目前相关研究较少。由于螺旋桨四象限动态模型领域在表达上有困难,因此迄今为止船舶运动仿真一般仅限于前向,即第一象限内的航行。螺旋桨在反转和反向制动时将进入推力和扭矩的第二象限,而在船舶倒航时将进入第三象限,这超出了一般螺旋桨图谱的表达范围,为螺旋桨逆转工况下的运动仿真带来了一定的困难。进行敞水桨四象限水动力性能研究不仅具有诸多理论意义,而且是解决诸多舰船操纵性和速航性课题(离靠泊、舰船避碰、各种特殊机动)的关键所在[1-4]。在该背景下,选取MARIN B系列螺旋桨中有代表性的螺距比P/D=1.0、盘面比AE/AO=0.7的四叶桨B4-7010,对其敞水四象限水动力性能进行数值模拟,并将分析后的结果与B系列螺旋桨敞水四象限试验图谱进行对比。结果表明:计算值与图谱值有较高的贴合性,采取的计算策略是成功的。
1 CFD计算模型与计算策略
1.1计算模型
以选取MARIN B系列螺旋桨中有代表性的螺距比P/D=1.0、盘面比AE/AO=0.7的四叶桨B4-7010为研究对象,计算采用模型尺度,桨模直径D=0.2 m。B4-7010模型的几何要素见表1。

表1 B4-7010模型几何要素
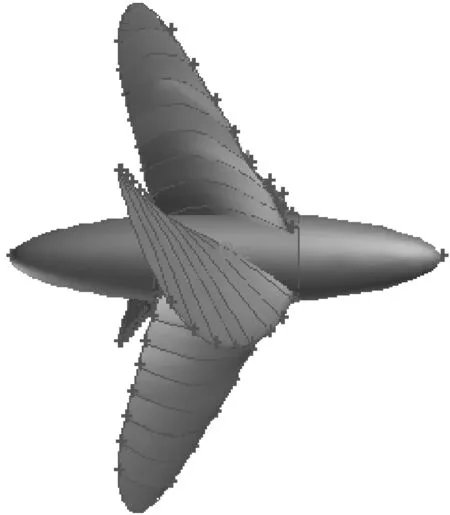
图1 B4-7010螺旋桨几何模型
利用Fluent前处理软件Gambit建立B4-7010螺旋桨的几何模型(见图1),具体步骤为:
(1) 螺旋桨二维几何数值进行坐标转化,得到螺旋桨三维空间坐标点,并将三维空间坐标点文件导入到Gambit中;
(2) 遵循“由点生线、由线生面、由面生体”的原则生成螺旋桨实体。
1.2计算策略
1.2.1计算域及网格划分
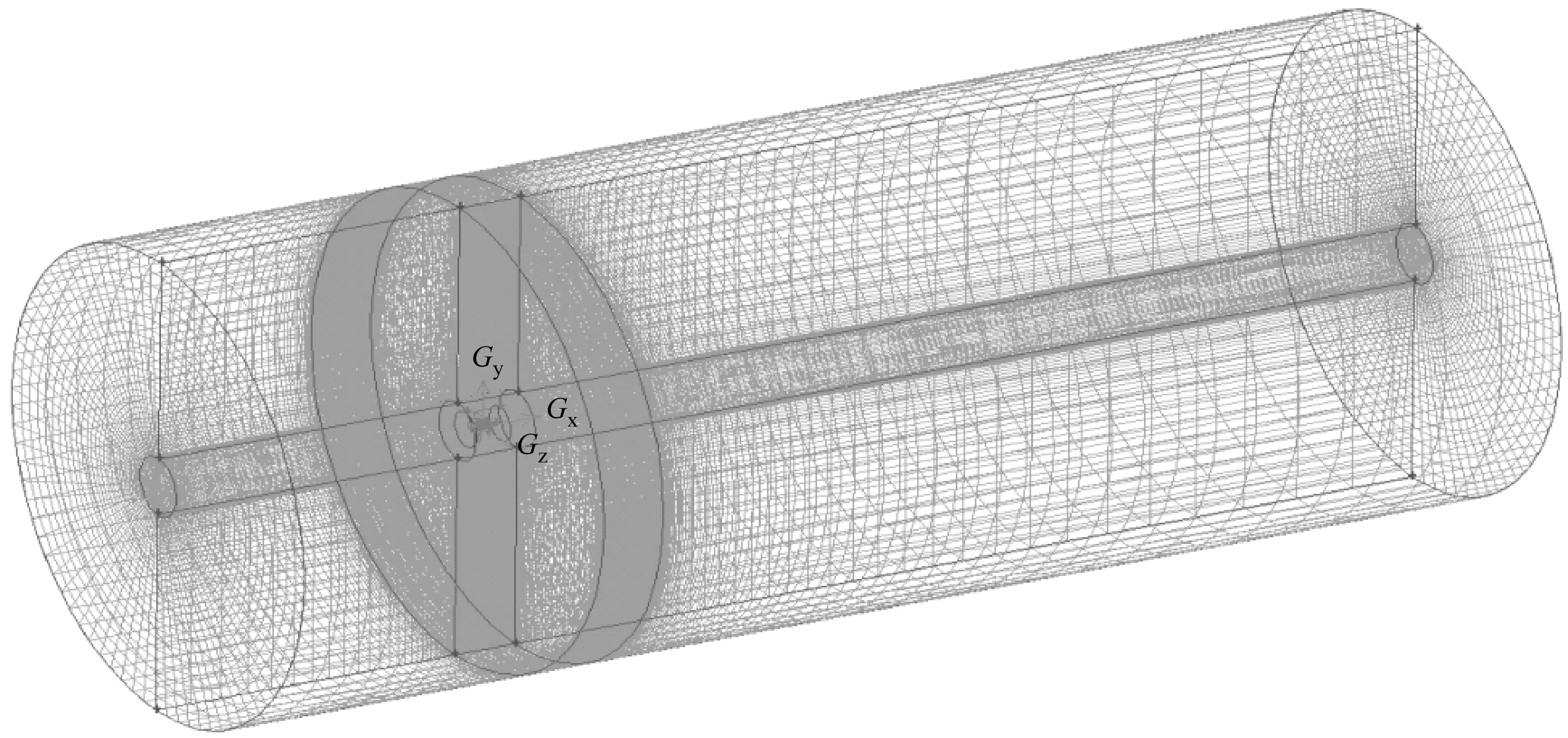
计算域为与螺旋桨同轴的圆柱体(圆柱体的高度和直径分别)为螺旋桨直径的30倍及10倍),其中:速度入口距离螺旋桨约7倍螺旋桨直径;压力出口距离螺旋桨约20倍螺旋桨直径。
网格划分是指计算区域的离散化,即将空间上连续的计算区域划分为多个子区域,并确定每个区域中的节点。网格划分的本质是用有限个离散的点代替原来的连续空间。数学上,生成网格后(离散化后)连续的控制方程将被离散化,描写流动和传热的偏微分方程将转化为各个节点上的代数方程组。网格划分是CFD数值计算过程中最重要的环节,直接影响模拟的精度和效率。若网格过疏,则会导致模拟精度不高;若网格过密,则又会导致计算量增大及计算难以收敛[5-6]。
为便于进行网格划分,需要将无限流域流场空间划分为多个小空间。计算空间域被分为外部计算域、过渡区和螺旋桨旋转域等3个部分。
(1) 最外层为外部计算域,该区域中压力和速度分布变化并不剧烈,主要反映导管螺旋桨的来流和尾流情况,因此可划分较粗的结构化网格;
(2) 在外部计算域和螺旋桨旋转域的过渡区中,速度压力分布变化较为剧烈,需要加入较为细化的非结构网格;
(3) 在螺旋桨旋转域中,速度压力分布变化非常剧烈,应采用比过渡区更加细致的非结构化网格进行计算。
在这3个区域中,外部计算域和过渡区均为静态域,而螺旋桨旋转域采用多重旋转坐标系(Multiple Rotational Frame, MRF)模型,设置为绕x轴正方向旋转,角速度为20 r/s。
在进口边界处设置为Velocity-inlet条件;出口边界定义为Pressure-outlet边界;外部计算域圆柱体表面设为Symmetry边界;所有壁面均设为无滑移固壁条件。
由于第一、二象限为前进,第三、四象限为后退,因此第一、二象限与第三、四象限的来流方向相反,同时螺旋桨旋转域及外部计算域的网格划分也会有些许差异。第一、二象限计算域网格划分总数为1 817 278,其中内部计算域网格划分数为909 515,偏斜率>0.8的网格数为6,网格质量达到要求;第三、四象限计算域网格划分总数为1 594 806,其中内部计算域网格划分数为810 301,偏斜率>0.8的网格数为0,网格质量同样达到要求。
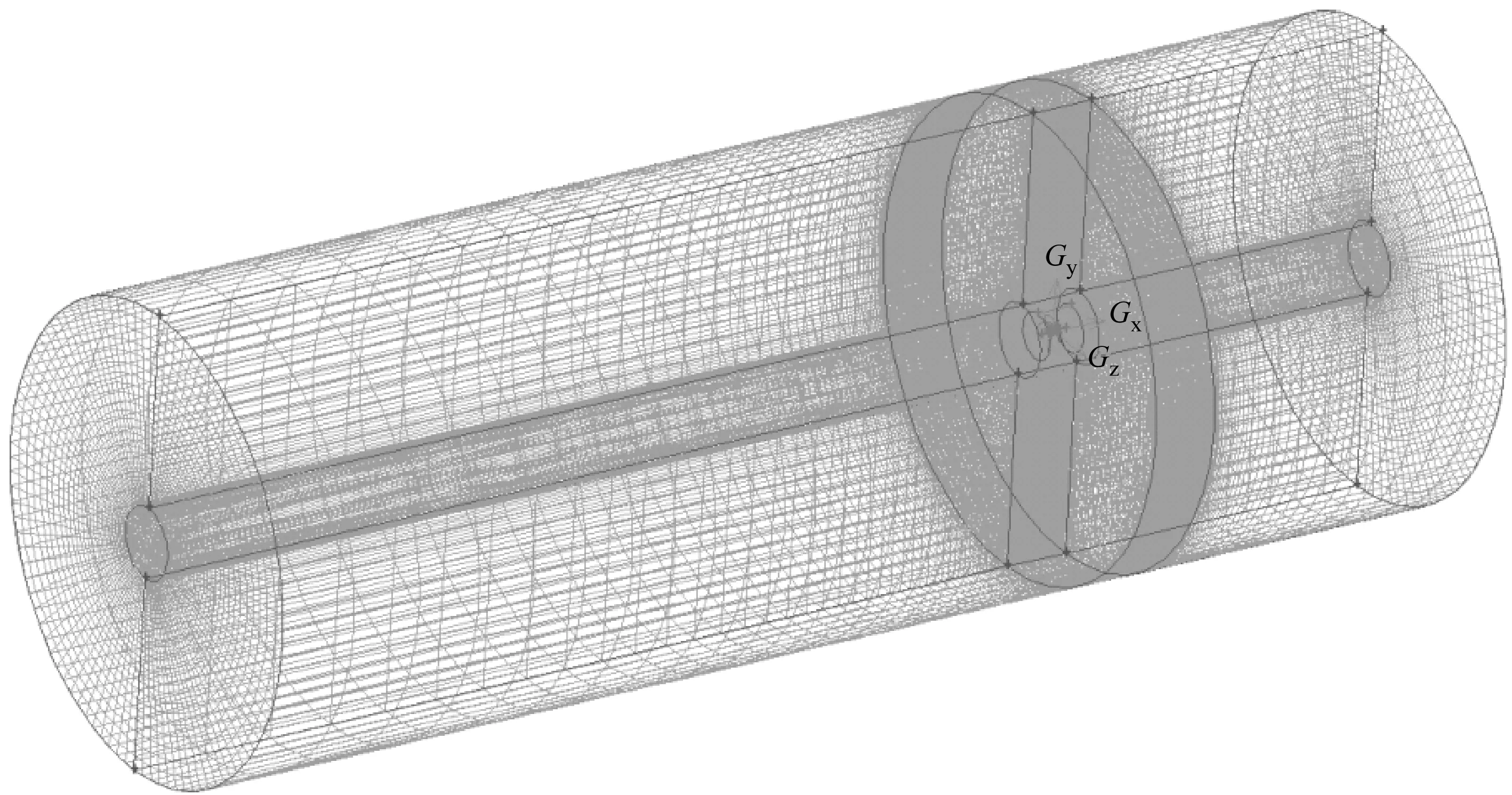
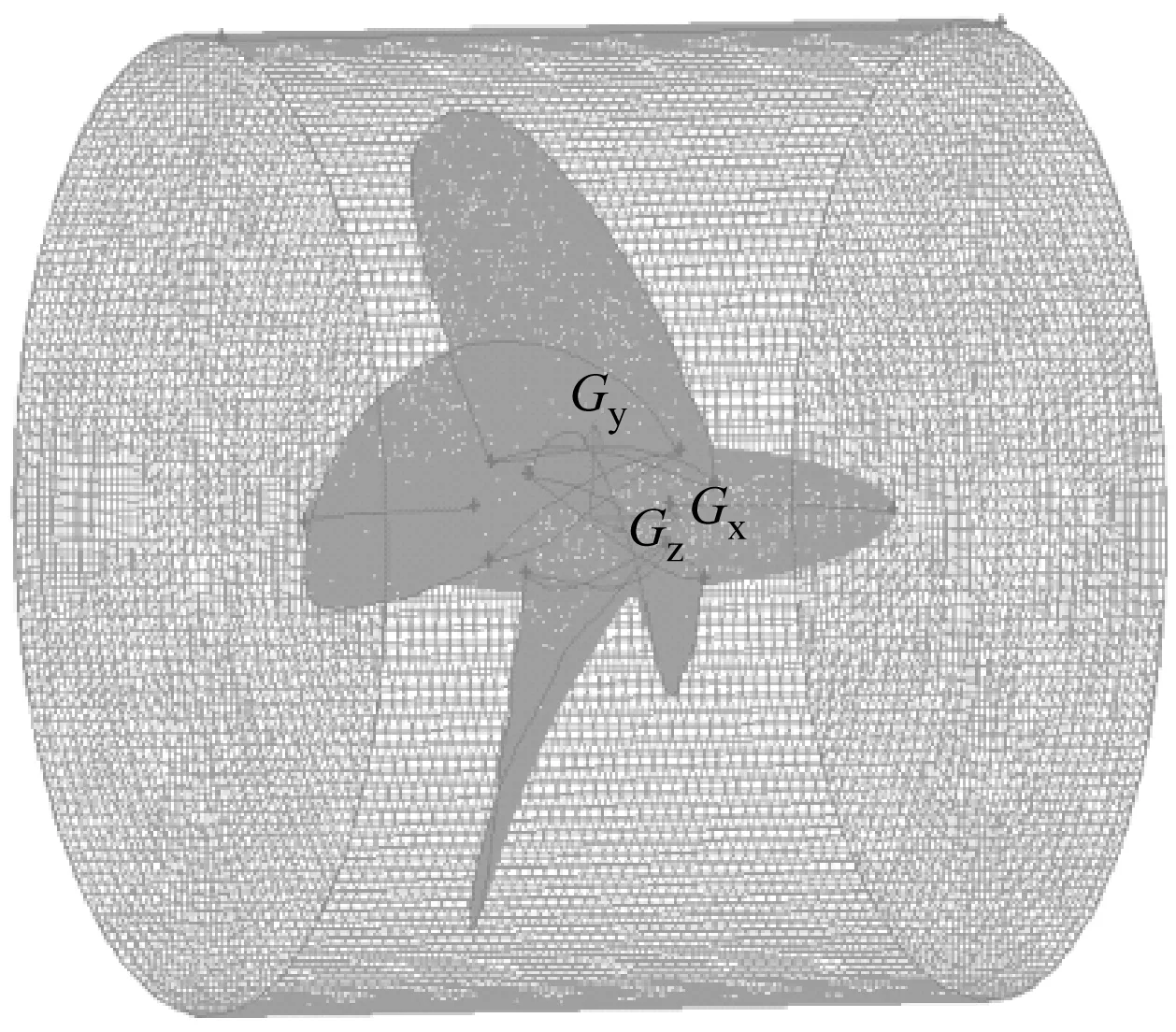
第一、二象限和第三、四象限计算螺旋桨旋转域及全部计算空间域网格划分情况见图2和图3。图2、图3中:Gx,Gy,Gz为O-xyz坐标系中Ox,Oy,Oz坐标轴的方向。
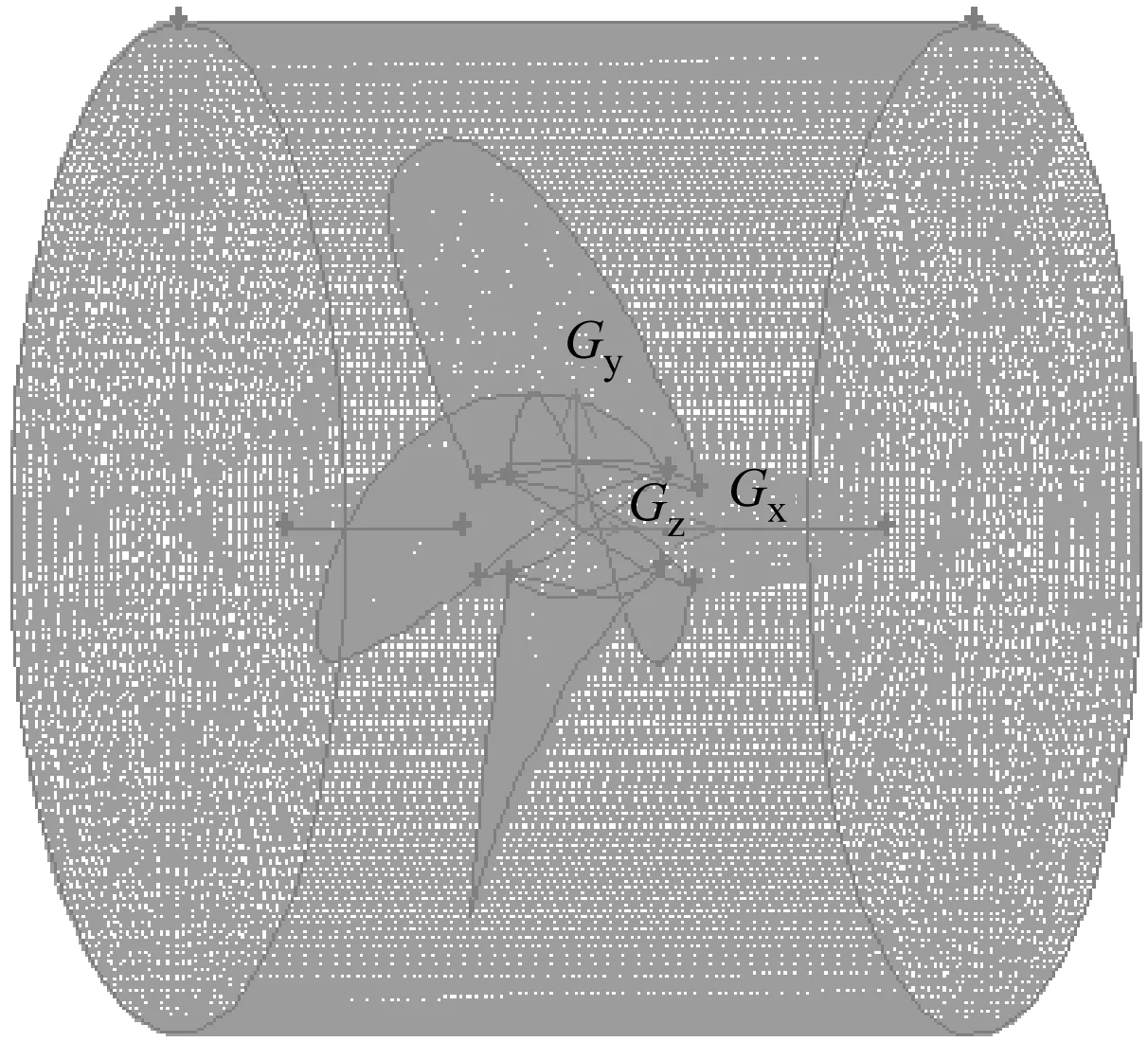
a) 螺旋桨旋转域网格划分情况
b) 全部计算空间域网格划分情况
1.2.2计算流体力学基本方程
连续性方程及动量方程分别为式(1)和式(2)。
(1)
(2)
1.2.3湍流模型
鉴于所模拟流场的特性,非定常湍流计算采用RNGk-ε双方程模型。其形式如下[7]
(3)
(4)
1.2.4计算参数设置
计算时运用SIMPLE半隐式连接压力方程;梯度插值采用Green-Gauss Cell Based方案;压力插值采用PRESTO!格式;动量、湍流动能及湍流耗散度的离散均选用二阶迎风差分格式[8]。
a) 螺旋桨旋转域网格划分情况
b) 全部计算空间域网格划分情况
2 计算及数据分析
2.1计算策略正确性验证
无因次推力系数[9-10]为
(5)
无因次扭矩系数为
(6)
这些系数是水动力螺距角β的函数。
(7)
式(5)~式(7)中:T为螺旋桨推力;Q为螺旋桨扭矩;ρ为水的密度,取998 kg/m3;VA为进速,单位为m/s;n为螺旋桨转速,取20 r/s;D为螺旋桨模型直径,取0.2 m。
依据计算结果及式(5)~式(7),根据不同象限计算出每个进速VA所对应的水动力螺距角β、推力系数CT和扭矩系数CQ,见表2~表5。

表2 一象限计算数据分析结果
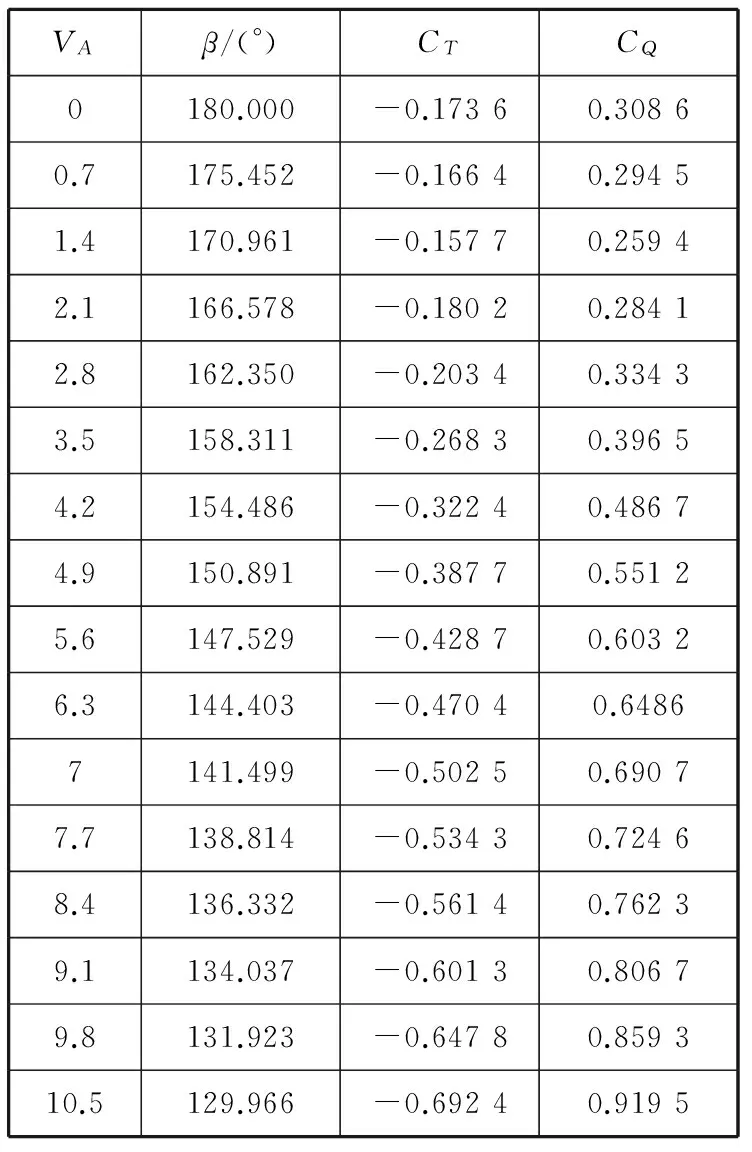
表3 二象限计算数据分析结果
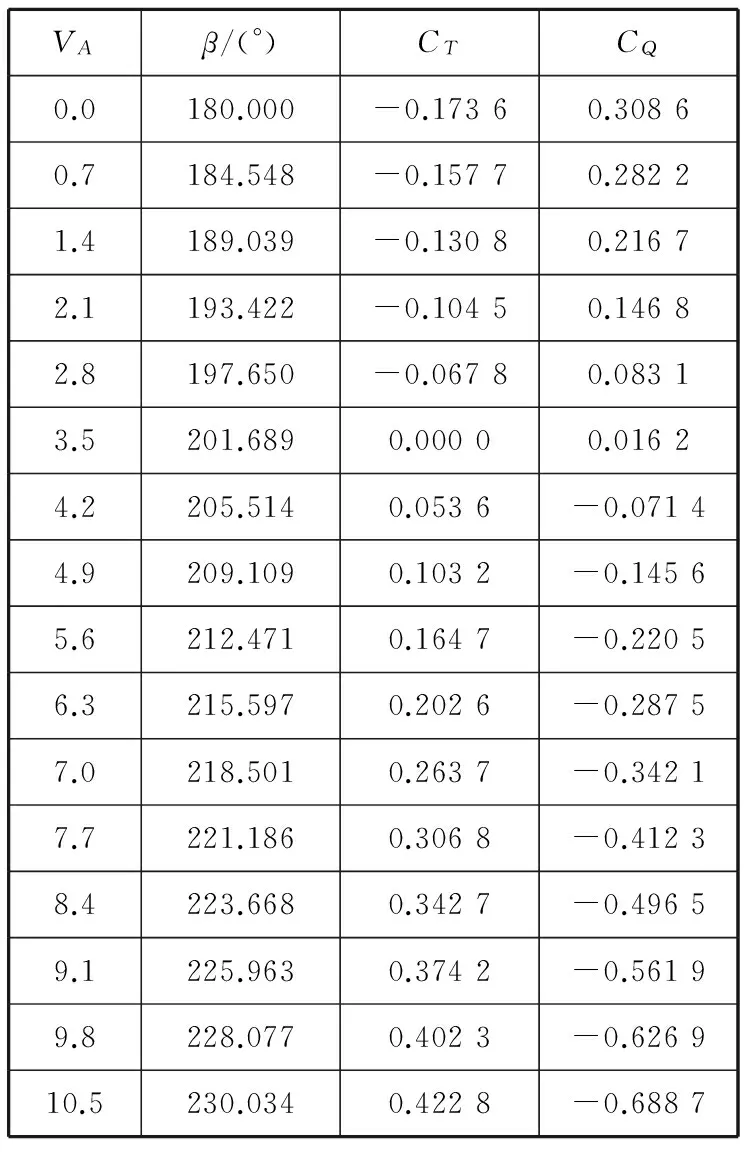
表4 三象限计算数据分析结果
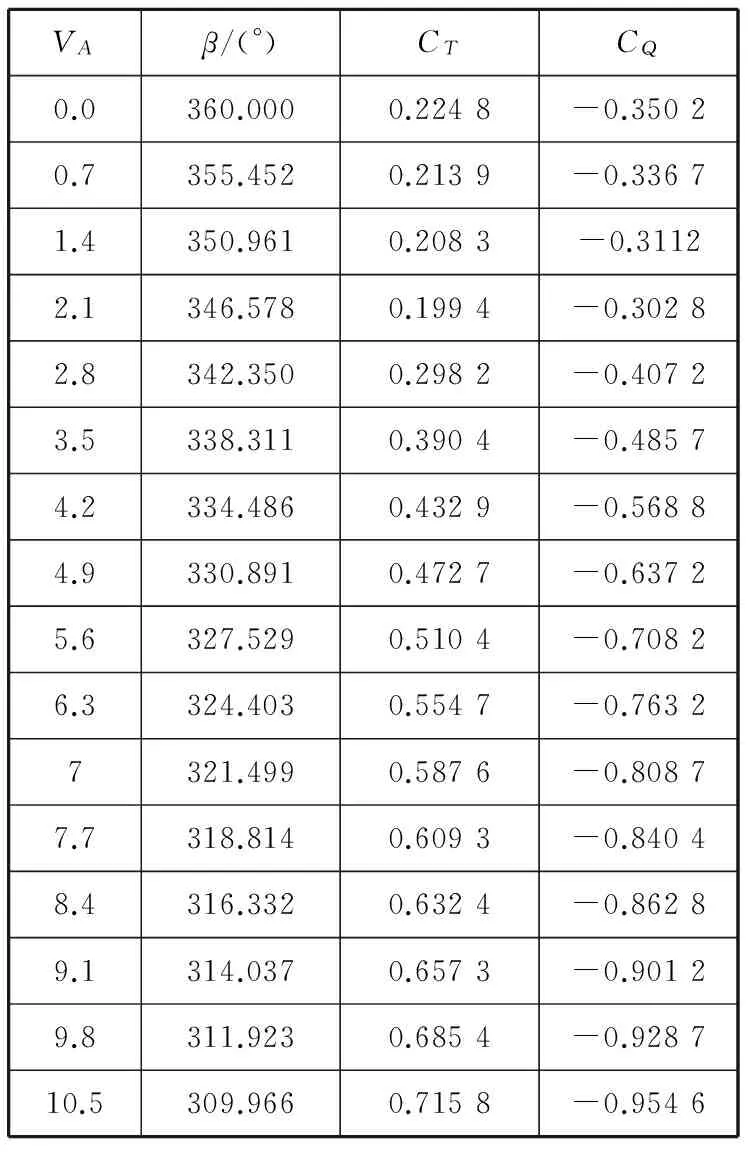
表5 四象限计算数据分析结果
根据以上数据,绘制出B系列螺旋桨四象限水动力性能图谱值和计算值曲线(见图4)。
由图4可知,图谱值与计算值的贴合性较高,计算结果较为满意,证明了所采取的计算策略的正确性。
2.2螺旋桨四象限水动力性能的影响分析
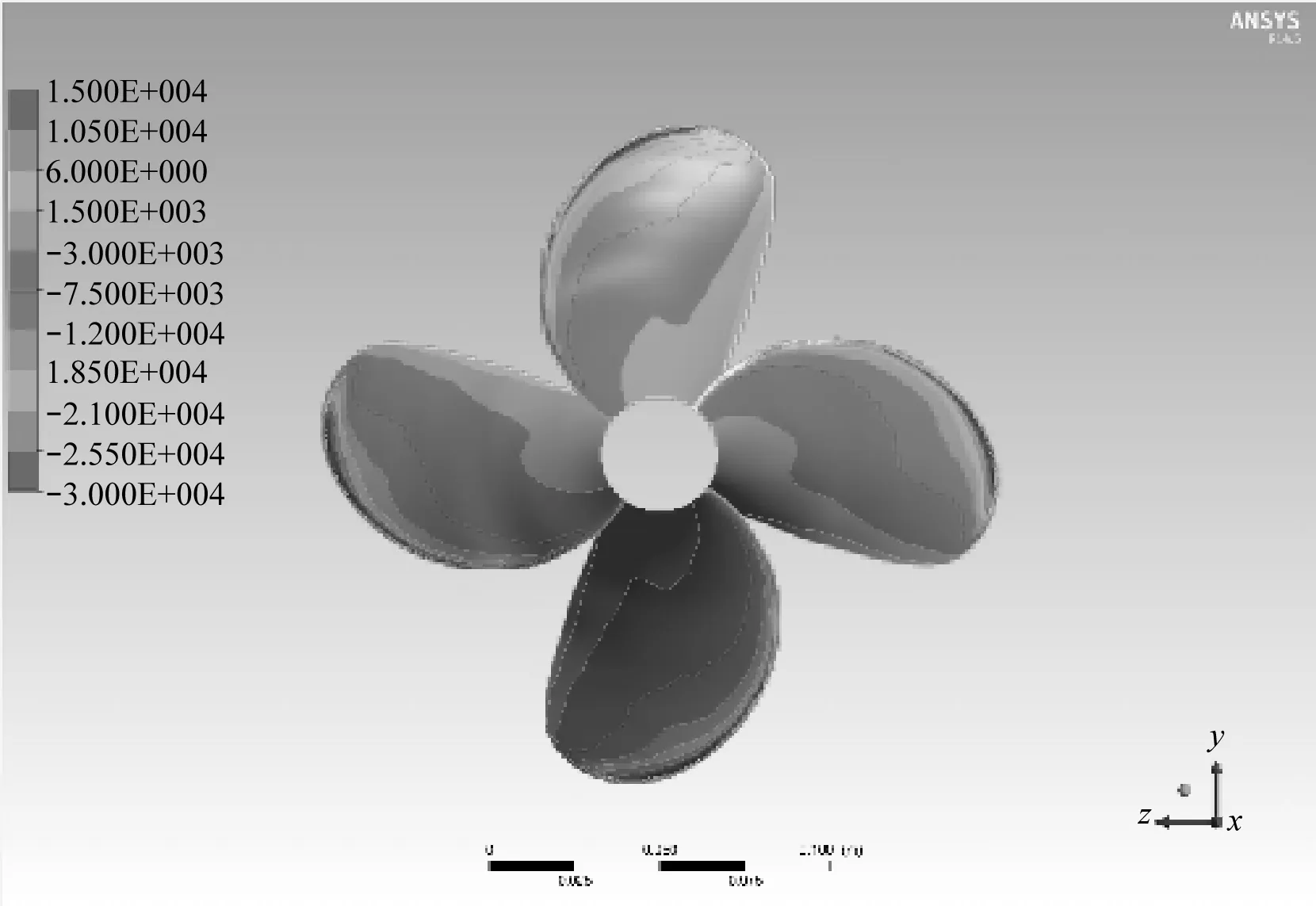
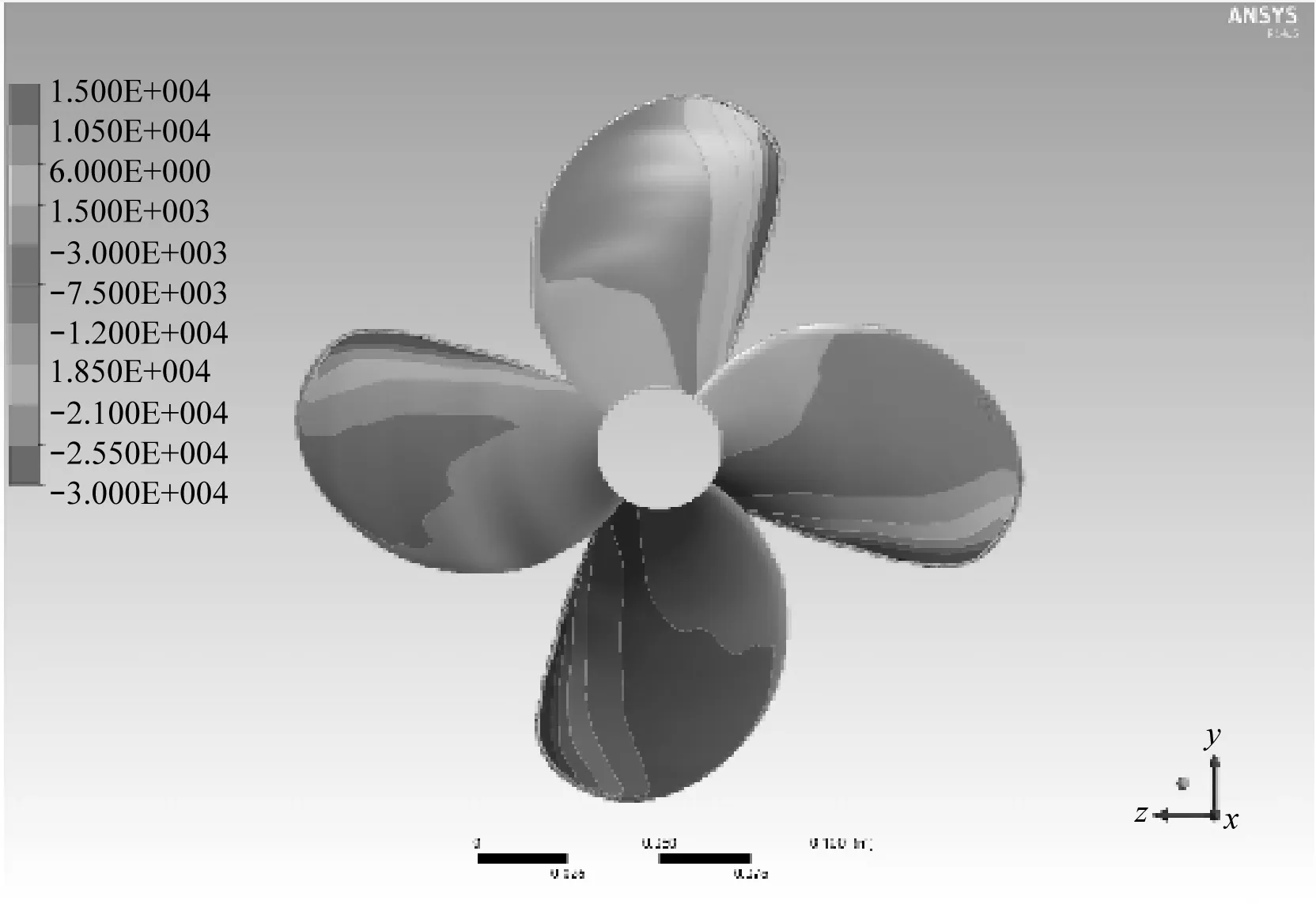
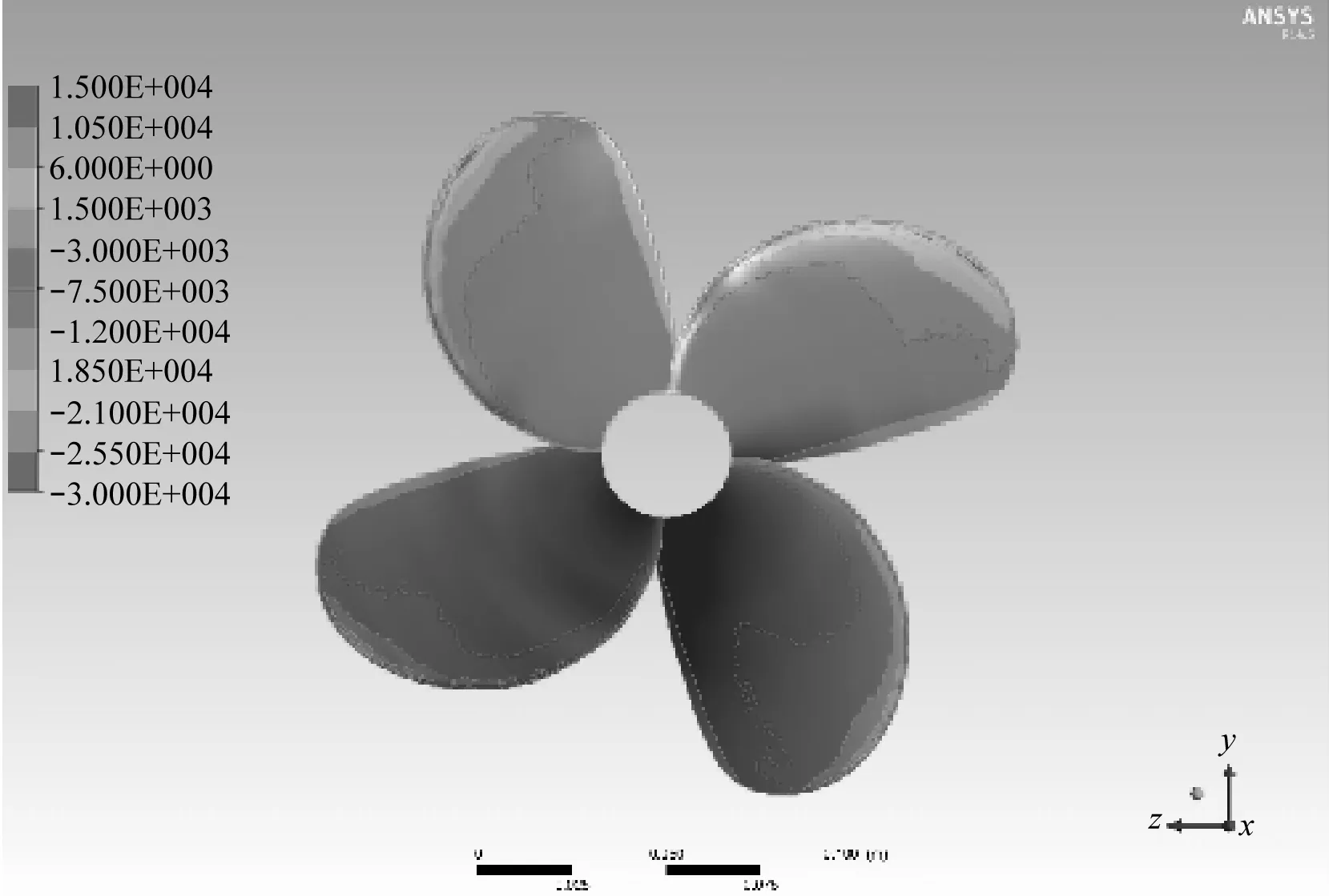
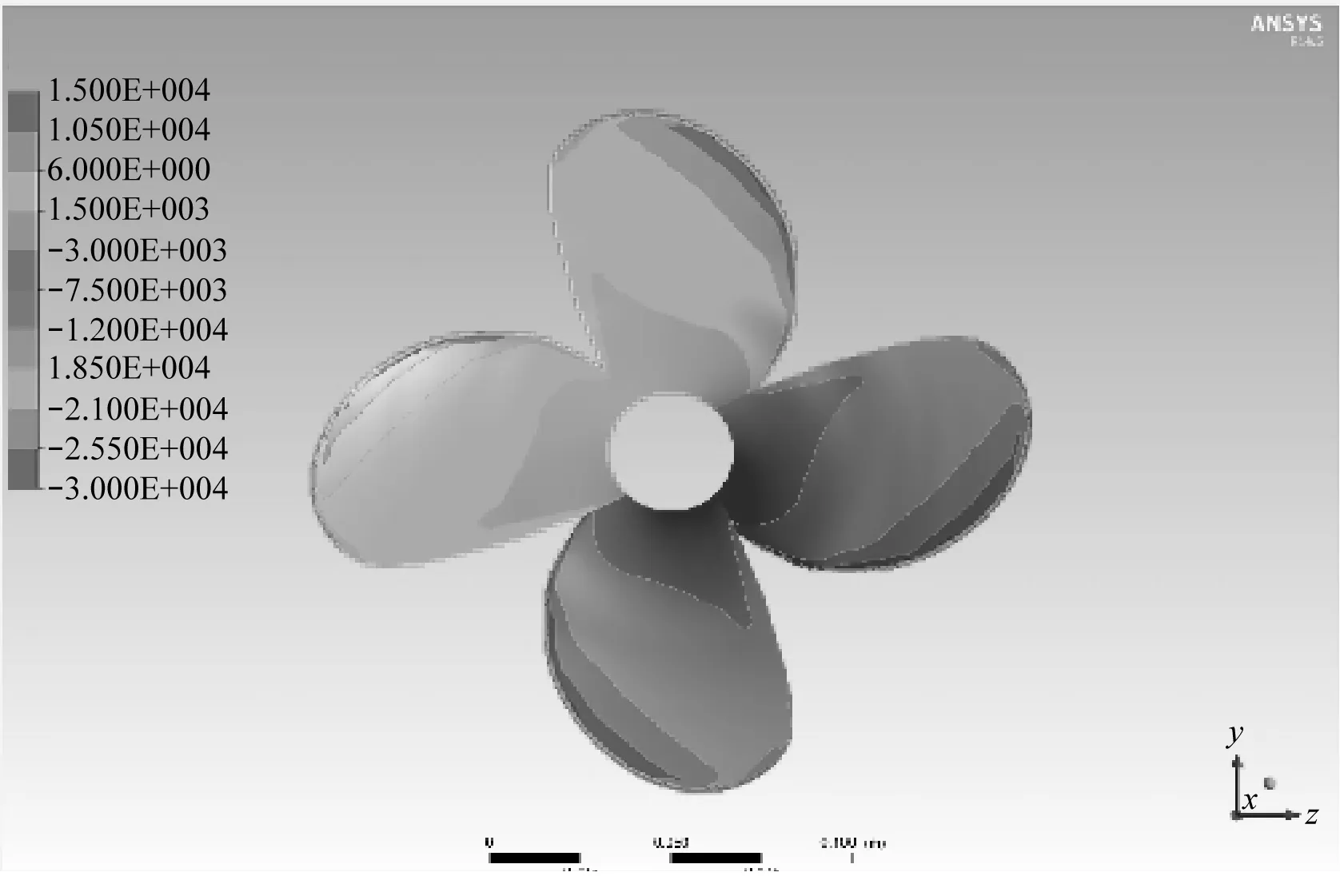
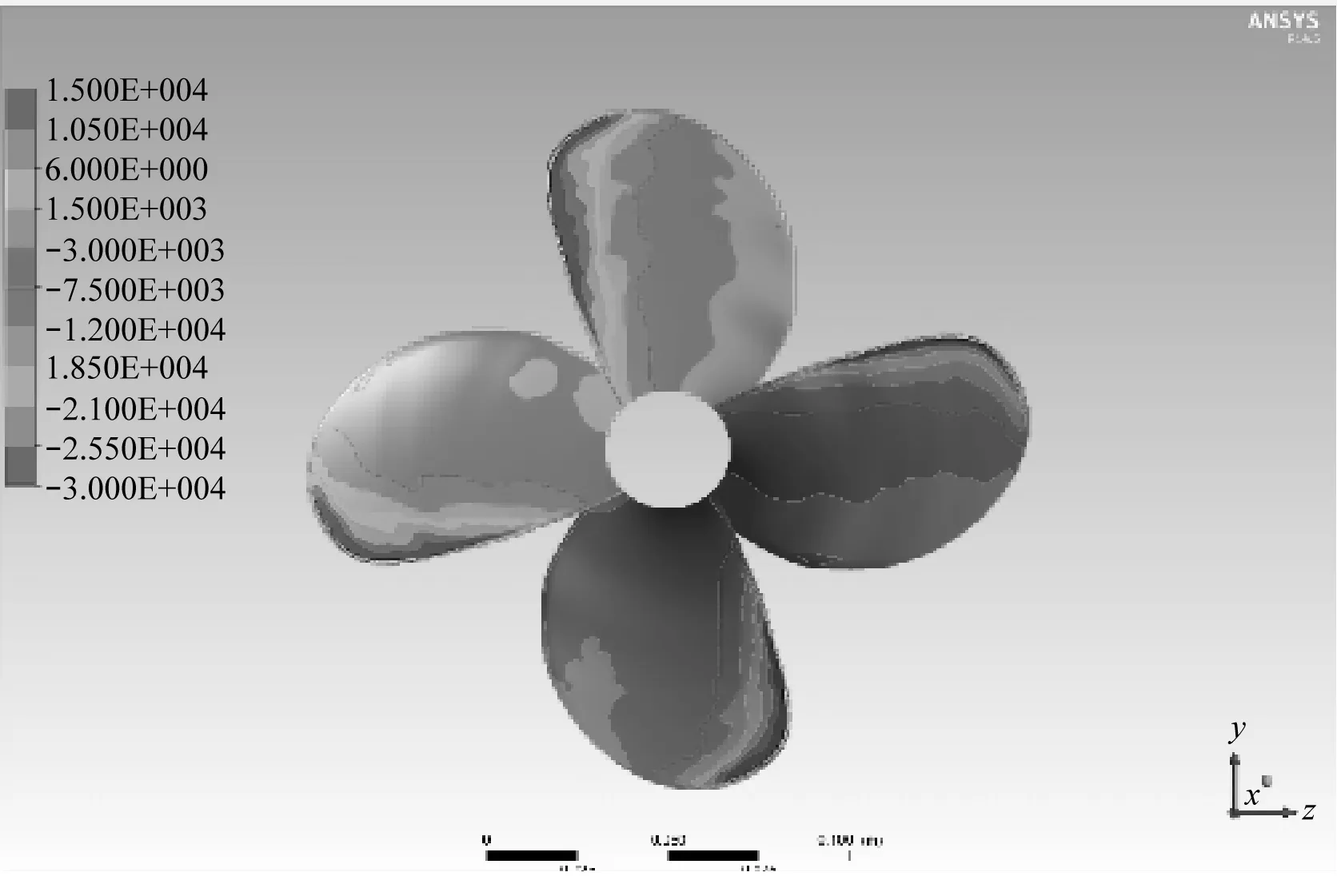
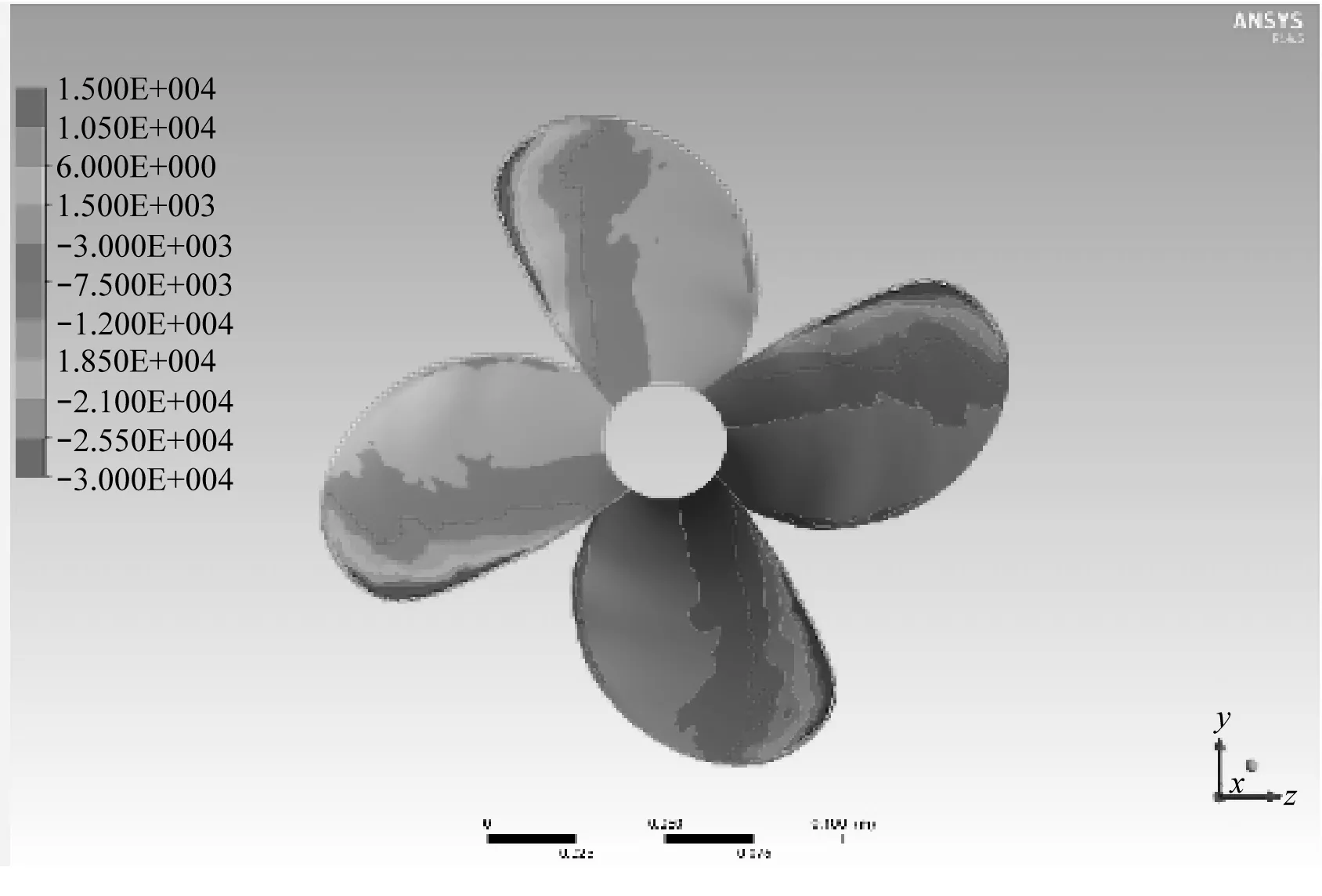
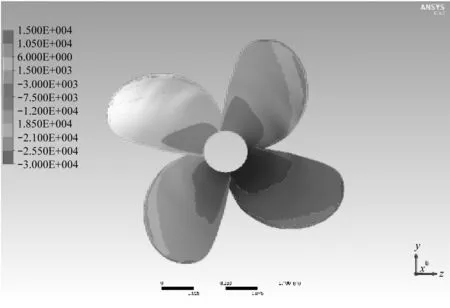
以VA=1.4 m/s时的工况为例,对4个象限的螺旋桨叶背、叶面压力分布情况进行分析,研究不同象限螺旋桨推力的变化情况。4个象限的螺旋桨叶背、叶面压力云图见图5和图6。
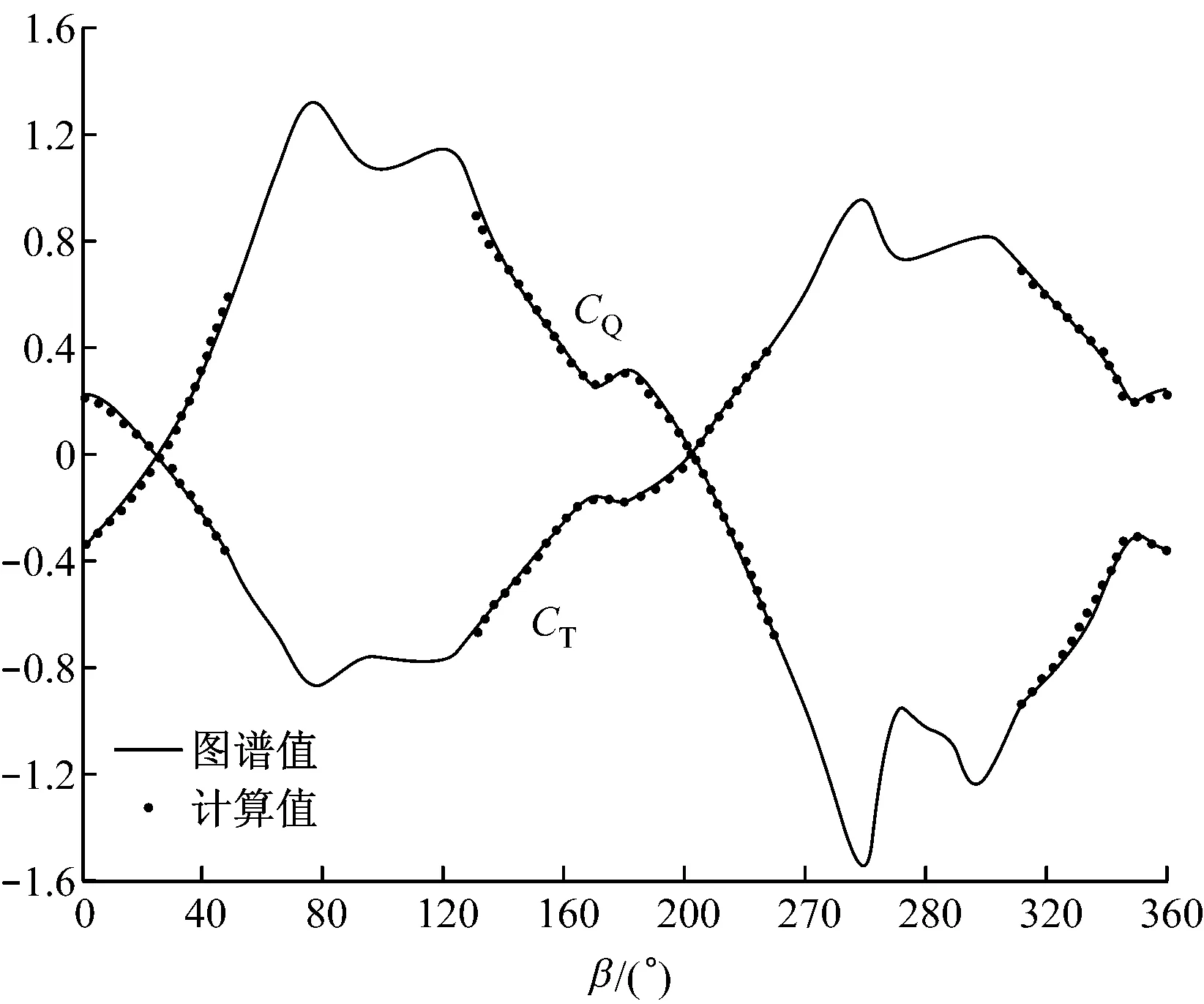
图4 四象限水动力性能曲线图
a) 一象限
b) 二象限
c) 三象限
d) 四象限
由图5可知,螺旋桨叶背对一、四象限而言为吸力面;而对二、三象限而言为压力面。吸力面压力由叶根到叶梢及由导边到随边均逐渐降低;而压力面压力由叶根到叶梢逐渐升高,二象限压力由导边到随边逐渐升高,三象限压力则由导边到随边先降低再升高,在叶面中部有一段径向分布的低压区。
由图6可知,螺旋桨叶面对一、四象限而言为压力面;而对二、三象限而言为吸力面。压力面压力由叶根到叶梢及由随边到导边逐渐升高;而吸力面压力由叶根到叶梢及由随边到导边均逐渐降低。
3 结 语
利用RANS雷诺时均方程组对B4-7010螺旋桨的敞水四象限水动力性能进行了数值模拟。首先,利用GAMBIT对螺旋桨进行了三维建模;其次,对螺旋桨的计算域进行了设计和网格划分,并设置了合适的边界条件;最后将其导入FLUENT进行计算。由计算结果与图谱值的对比可知,计算结果与图谱有着较高的贴合性。这既证明了计算结果的精确性,又证明了所采用的计算策略的正确性。同时,为后续导管螺旋桨、可调螺距螺旋桨四象限水动力性能的研究打下了基础。
a) 一象限
b) 二象限
c) 三象限
d) 四象限
[1]李理,刘可,李超,等. 螺旋桨四象限水动力性能数值模拟及应用[J]. 舰船科学技术, 2012, 34(7): 8-14.
[2]孙洪波,洪碧光,谷元全. 螺旋桨的四象限推力系数和转矩系数的MATLAB实现方法[J]. 大连海事大学学报,2006,32(2): 42-44.
[3]孙永华. 荷兰船模水池B系列螺旋桨新旧图谱的比较[J]. 船舶, 1997(3): 30-36.
[4]孙洪波. 螺旋桨逆转工况下船舶运动建模与仿真[D]. 大连:大连海事大学,2007.
[5]盛振邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2004.
[6]王献孚, 周树信, 陈泽梁, 等. 计算船舶流体力学[M]. 上海:上海交通大学出版社,1992.
[7]黄胜, 王超, 王诗洋. 不同湍流模型在螺旋桨水动力性能计算中的应用与比较[J]. 哈尔滨工程大学学报,2009,30(5): 481-485.
[8]王诗洋, 解学参, 王超, 等. 参数选择对螺旋桨水动力性能的影响[J]. 船舶工程,2010,32(6): 4-8.
[9]付颐鑫.船舶螺旋桨敞水性能CFD模拟[D].大连:大连海事大学,2012.
[10]王亮.船舶螺旋桨变参数水动力性能研究[D].大连:大连理工大学,2012.
Numerical Simulation of Four-Quadrant Hydrodynamic Performance of Propeller
ZHANG Wencan,DONG Guoxiang,CHEN Weimin,DU Yunlong,REN Haikui
(StateKeyLaboratoryofNavigationandSafetyTechnology,ShanghaiShip&ShippingResearchInstitute,Shanghai200135,China)
Four-quadrant hydrodynamic performance numerical simulation of open-water propellers is a hotspot in the field of propeller numerical simulation. However, there has not been much research work on the four-quadrant hydrodynamic performance of propellers published. Through solving RANS equations and using CFD software Fluent, CFD numerical simulation of MARIN series B propeller is carried out to investigate its open-water four-quadrant hydrodynamic performance. The simulation results are compared with the test-graph results to prove the validity of calculation strategy. This research may inspire further research on the four-quadrant hydrodynamic performance of propellers.
MARIN series B propeller; four-quadrant; hydrodynamic performance; numerical simulation
2015-07-31
张文璨(1990—),男,辽宁沈阳人,硕士生,主要从事船舶推进器水动力性能研究。
1674-5949(2016)01-001-07
U661.31+3;U664.33
A
猜你喜欢
中学生数理化·高一版(2022年3期)2022-04-05 08:17:14
少先队活动(2020年12期)2021-01-14 01:47:40
航空发动机(2020年3期)2020-07-24 09:03:16
电子测试(2018年11期)2018-06-26 05:56:04
中学生数理化·七年级数学人教版(2017年4期)2017-07-08 11:48:34
中成药(2017年3期)2017-05-17 06:09:01
领导科学论坛(2016年9期)2016-06-05 14:59:58
中学生数理化·七年级数学人教版(2015年3期)2015-05-30 10:48:04
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年1期)2014-05-14 06:40:47
