
基于STM32的太阳模拟器控制系统设计
2016-09-06 09:32张嘉钰窦建秦牛虎利河北科技大学机械工程学院河北石家庄050018
河北工业科技 2016年1期
张嘉钰,窦建秦,牛虎利,常 笑(河北科技大学机械工程学院,河北石家庄 050018)
基于STM32的太阳模拟器控制系统设计
张嘉钰,窦建秦,牛虎利,常 笑
(河北科技大学机械工程学院,河北石家庄 050018)
聚焦型太阳模拟器应用于光热发电相关试验,主要由风冷系统、光学系统、机械系统、控制系统组成。为了消除系统的人工安装误差、减小光斑调整误差,设计了基于STM32处理单元,结合PID算法,采用RS485通信标准,以液晶触摸屏为输入输出单元的太阳模拟器控制系统。该系统主要包括氙灯光强度控制、氙灯阴极温度控制、氙灯单元俯仰、平移控制等模块。通过对控制系统的搭建,实现了光斑面积与焦平面的位置调整,以及氙灯阴极温度的检测与控制,有效解决了多光源系统焦点光斑汇聚重合的问题。
自动化技术应用;STM32;太阳模拟器;温度控制;光斑聚焦
太阳模拟器分为准直型太阳模拟器和聚焦型太阳模拟器。前者的特征是在较大的辐照面积内提供与太阳光谱分布相匹配的、均匀的、准直稳定的太阳光辐照,主要用来测试太阳电池光伏特性和收集太阳光能;后者的特征是在小辐照面积内获取极高的辐射通量,主要应用于测试光热转换部件和材料的高热特性和热化学特性[1-3]。目前国内外太阳模拟器的设计主要集中在如何增大辐照度方面,而对模拟器的各个系统一体化研究较少。大多数太阳模拟器的光学系统直接固定到支架上,无法进行精确位置调整[4-6]。本文中聚焦型太阳模拟器、7组灯单元组成空间球面分布(见图1),通过对其进行机械驱动模块和风冷模块的精密调节,使光斑汇聚重合形成高强度辐照光斑。太阳模拟器控制系统通过氙灯单元的俯仰和平移调整,能够实现汇聚光斑的调整;通过氙灯阴极温度的检测,进行冷却风量的精确调整,能够实现氙灯阴极温度的精确控制。

图1 太阳模拟器Fig.1 Solar simulator
1 控制系统简介
太阳模拟器控制系统是以STM32F103VCT6单片机为处理单元建立的应用系统[7],包括液晶触摸屏、氙灯阴极温度传感器、风机变频器FRN1.5G1S-4C、YK86型步进电机、线性模组行程传感器等,控制系统功能框图如图2所示。单片机控制系统负责完成前端实时控制,利用FPGA进行串口扩展[8]。电机驱动模块采用编码器实时反馈当前角度与平移位置信息,同时对平移距离进行反馈;氙灯温度自动调整模块利用氙灯阴极温度传感器进行温度采集,经处理单元运算后控制风机变频器对风机风量进行调整,达到对氙灯温度的闭环控制;使用RS485通信标准避免了各系统间的电磁干扰。
STM32系列单片机是基于嵌入式ARM Cortex-M3内核的32位微处理器,工作频率为72 MHz,内置高速存储器(包括256KB的Flash和48 KB的SRAM),含有多达112个快速I/O端口,3 个12位的ADC、4个通用16位定时器和2个PWM定时器,还包含先进的通信接口:2个I2C,3 个SPI,2个I2S,1个SDIO,3个USART,1个USB 和1个CAN。
本文中太阳模拟器要求氙灯温度≤180℃,工作环境温度≤50℃。因此氙灯阴极温度传感器采用非接触式红外探头传感器MIK-AL-10,测温范围0~300℃,工作环境温度0~60℃,测量精度1℃;变频器FRN配有RS485通信接口,使用自动滑差补偿功能,提高速度控制精度,缩短整定时间;步进电机型号为YK86HB80-04A,步距角1.8°,步距精度5%,额定电流4.2A。
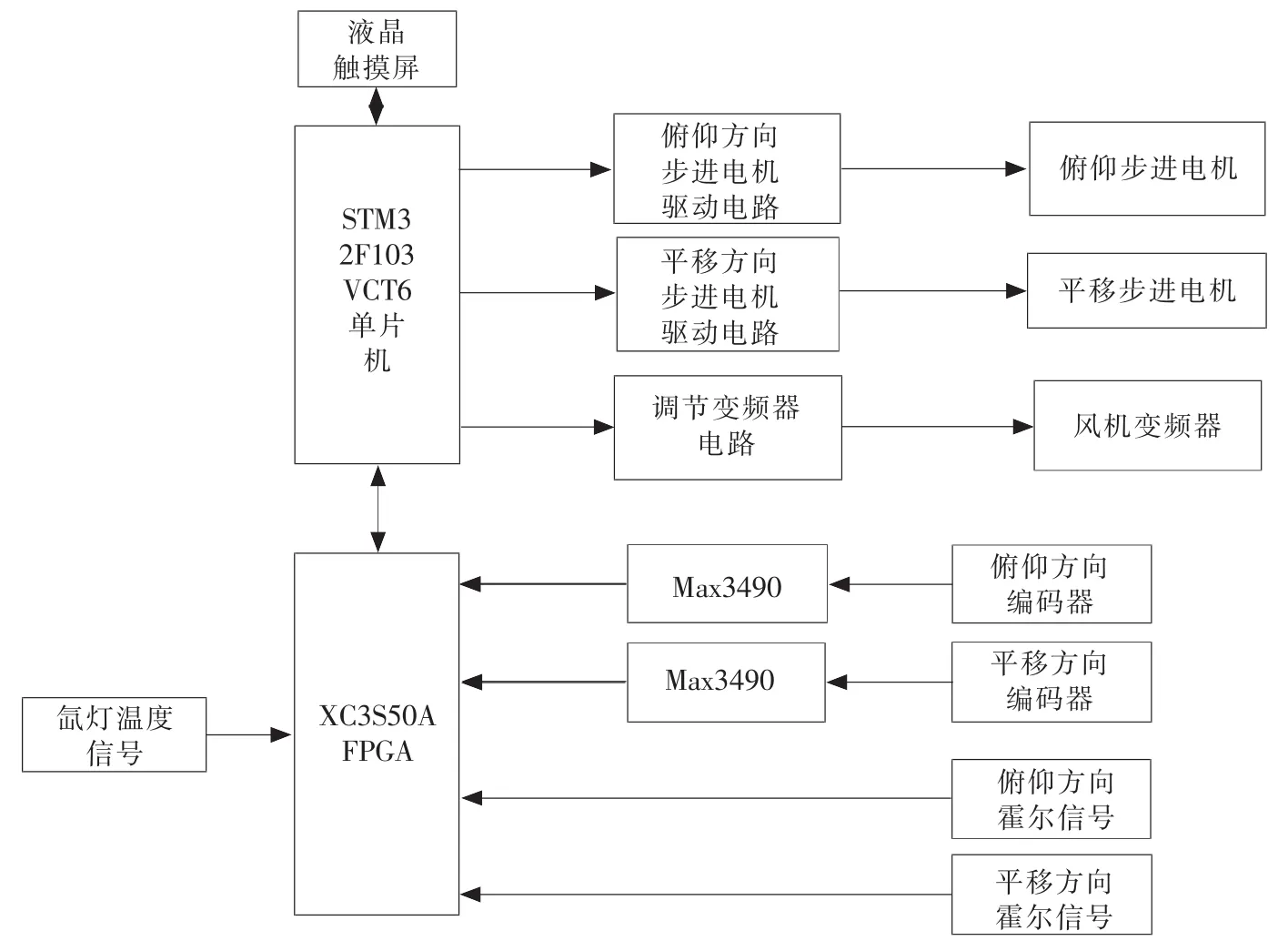
图2 控制系统功能框图Fig.2 Control system functional block diagram
2 控制系统工作流程
为把7组灯的光斑汇聚到一点,首先将中间灯的光斑中心坐标(x0,y0)设为光斑汇聚点。以外围灯为例(见图3):把各个机械部件调整至初始位置,即旋转为0°,俯仰为0°,平移为0mm。可以计算出初始光斑中心位置(x1,y1),确定它与中心距离L。已知聚光罩焦距为2 050mm,即发光点到(x0,y0)点距离,理论上光斑垂直入射(x1,y1)点,可以计算出俯仰角θ=arcsin(L/2 050),俯仰角调整完以后利用辐照度测量系统对单灯光斑数据采集,电机驱动三维调整部件将光斑辐照度最高点微调至(x0,y0)点,依次类推,直至7组灯光斑中心重合。
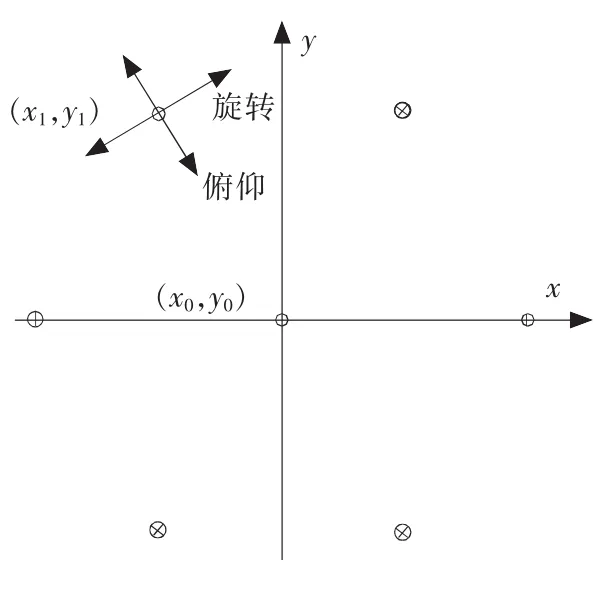
图3 光斑汇聚调整示意图Fig.3 Spot convergence adjustment schematic
控制系统功能主要由两部分组成:一是根据理论计算结果对俯仰和平移机构进行调整;二是氙灯温度传感器信号反馈到单片机,对风机变频器进行调整来改变风量,流程图如图4所示。以单片机STM32做主控制器,接收经串口RS485传输的液晶显示屏输入的控制指令和运行角度参数,分别驱动控制步进电机YK86进行俯仰和平移运动,实现光学系统机械结构精确运动;以FPGA作为辅助处理器扩展口,读取俯仰和平移方向上编码器实时反馈的角度和位移信息,经过串口RS485在液晶显示屏上实时显示;氙灯阴极处的温度传感器将实时温度数据传至单片机,与液晶显示屏输入的设定温度范围进行PID比较运算,控制信号经串口RS485传递给风机变频器从而调整冷却风量。
3 控制系统算法
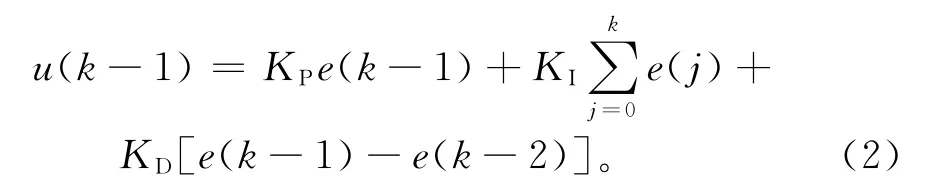
风量控制采用数字PID增量算法[9-10],离散的PID表达式为


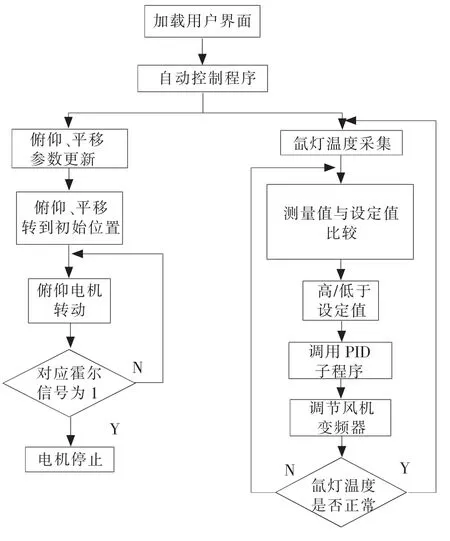
图4 控制系统流程图Fig.4 Flow chart of the control system
式中:KP为控制器的比例放大系数为积分系数为微分系数,T为采样周期;k为采样序号,k=1,2,…,n;u(k)为第k次采样时刻的计算机输出值;e(k)为第k次采样时刻输入的偏差值;e(k-1)为第(k-1)次采样时刻输入的偏差值。
该系统采用增量式PID控制算法,是指数字控制器输出只是控制量的增量,该算法编程简单,数据可以递推使用,占用存储空间少,运算快。根据递推原理可得:用式(1)减去式(2),可得增量式PID控制算法:

参数整定具体步骤如下。
1)先设控制器积分时间TI=∞,微分时间TD=0。将系统投入运行,整定比例度KP,如果曲线振荡频繁,则加大比例度KP;如果曲线超调大,且趋于非周期过程,则减小比例度KP。
2)引入积分作用,将由大到小进行整定。如果曲线波动较大,则应该增大积分时间TI,如果曲线偏离设定值后长时间回不来,则需要减小TI,以求得较好的过渡过程曲线。
3)引入微分作用,将TD=(1/4~1/3)TI设置,并且由小到大进行调整。如果曲线超调大而衰减慢,则增大TD;如果曲线振荡厉害,则需要减小TD。观察曲线,再适当调节KP和TI,反复调试直到求得满意的实际控制曲线为止。
本文根据现场试验计算出最大超调量为10℃,由试验参数确定当氙灯温度e<100℃时,风量固定不变;当氙灯温度100℃≤e≤170℃时,采用PID控制;当e>170℃时断开电源。
在数字控制系统中,对于那些有较大滞后的系统来说采样周期是一个比较重要的因素,一般都要让滞后时间等于采样周期的整数倍。本系统滞后时间T0为10s,因此系统的采样周期T就可以定为2s,即T0是T的5倍。相对于温度这样的慢速变化的量而言这种逼近相当准确,被控过程与连续过程基本无异。
4 主要控制模块组成
4.1温控模块设计
控制系统中氙灯阴极温度采集电路见图5。CON端连接氙灯阴极温度传感器,经传感器热电转换将温度信号转成4~20mA电流信号,经过电路滤波后进行A/D转换,传入单片机。
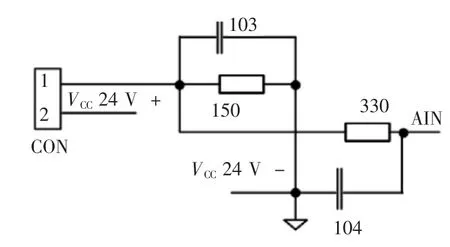
图5 温度采集电路Fig.5 Temperature acquisition circuit
单片机通过RS485通信调节风机变频器共计7路,如图6所示:TXD和RXD分别连接单片机的RXD和TXD的串口引脚,DIR485引脚控制读写数据,光电耦合器作为输入和输出信号隔离,准确保留数据信号,避免了电磁干扰对数据传输系统的影响,输出脉冲信号至高电平,光电耦合器TLP781GR接通,然后经过SP483芯片使得TTL串行总线标准被转换成485串行总线标准,而且485的比较输出形式可以实现RS485的远距离通信[11-16]。
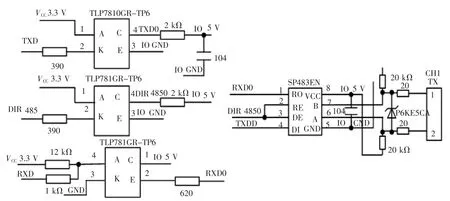
图6 RS485通信模块Fig.6 RS485communication module
4.2电机驱动模块设计
在液晶触摸屏上输入灯单元空间位置参数,电机驱动模块按照设定值控制7组灯进行俯仰角的运动。当光斑汇聚完成后,在触摸屏上可以调整7组线性模组平移进行汇聚光斑大小的调整,其电机控制部分原理图如图7所示,首先单片机输出脉冲信号SELx选定电机,接着输出脉冲信号至高电平,电机正转,带动线型模组与灯室组件开始移动,直至达到预定位置;若让组合体返回初始位置,则单片机输出脉冲信号至低电平,电机反转,组合体到初始位置停止。
为了电路的输入处于完全隔离的状态,实现输入输出部分的电器隔离,提高其抗干扰能力和稳定性,A/D输出电路与单片机数字电路采用HCPL2531光耦隔离设计,这种信息传递方式的信号传输速度快,在对信号的传输有速度要求的设计中很常用。
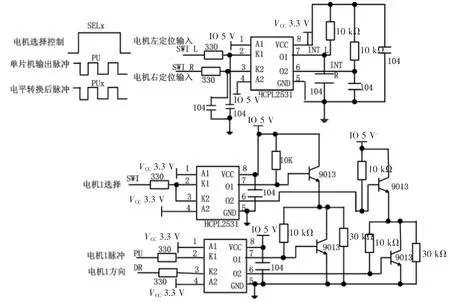
图7 电机控制电路图Fig.7 Motor control circuit diagram
5 工作台的人机界面设计
太阳模拟器在工作状态下具有非常高的温度,氙灯极高的亮度对人眼有伤害,为保护人身安全要求在工作状态下不得有人靠近,一切操作均须在工作台远程控制完成。工作台的设计还方便操作人员随时检测系统的工作状况。
如图8所示,操作台整体分为3个部分。

图8 操作台正面图示Fig.8 Front view of the station
1)灯室监控部分。在灯室安装4个摄像头,对光学系统和实验台进行实时人工监控,若有问题可随时关闭电源。
2)手动按钮操作部分。这部分主要包括流量、风温、风压显示及其调控部件,氙灯工作状态指示灯,氙灯功率调节器,氙灯开关,氙灯触发按钮等。
3)触摸屏及键盘部分。用户可以通过触摸屏查看各项监测数据,直接操作或者通过键盘功能按钮都可进行操作。
6 结 论
设计了一种以STM32F103VCT6单片机为核心,结合PID增量式算法,采用RS485通信标准,以液晶触摸屏为辅助单元的太阳模拟器控制系统。该系统采用电机驱动机械机构进行调整,以传感器进行反馈,可以满足光斑高精度汇聚的要求,克服了原来由人工检查调控带来的各种问题,有效解决了模拟器运动机构位置和氙灯温度的精确控制问题。
/References:
[1] 刘洪波,高雁,王丽,等.高倍聚光太阳模拟器的设计[J].中国光学,2011,4(6):594-599.LIU Hongbo,GAO Yan,WANG Li,et al.Design of high-flux solar simulator[J].Chinese Optics,2011,4(6):594-599.
[2] 胡云岩,张瑞英,王军.中国太阳能光伏发电的发展现状及前景[J].河北科技大学学报,2014,35(1):69-72.HU Yunyan,ZHANG Ruiying,WANG Jun.Development status and prospect of solar photovoltaic power generation in China[J].Journal of Hebei University of Science and Technology,2014,35(1):69-72.
[3] 崔海亭,孙坤坤,李宁.太阳能热发电用高温相变蓄热器的数值模拟[J].河北科技大学学报,2015,36(2):219-224.CUI Haiting,SUN Kunkun,LI Ning.Numerical simulationof high-temperature phase transition thermal energy storage container for solar thermal power generation applications[J].Journal of Hebei University of Science and Technology,2015,36(2):219-224.
[4] 张国玉,刘淑红,王凌云,等.移动式太阳模拟器控制系统研究[J].长春理工大学学报(自然科学版),2009,32(1):1-3.ZHANG Guoyu,LIU Shuhong,WANG Lingyun,et al.Research on the control system for the moving sun simulator [J].Journal of Changchun University of Science and Technology(Natural Science Edition),2009,32(1):1-3.
[5] 庞贺伟,黄本诚,臧友竹,等.KM6太阳模拟器设计概述[J].航天器环境工程,2006,23(3):125-133.PANG Hewei,HUANG Bencheng,ZANG Youzhu,et al.Design of KM6solar simulator[J].Spacecraft Environment Engineering,2006,23(3):125-133.
[6] 杨林华,李竑松.国外大型太阳模拟器研制技术概述[J].航天器环境工程,2009,26(2):162-167.YANG Linhua,LI Hongsong.The development of large solar simulators in the world[J].Spacecraft Environment Engineering,2009,26(2):162-167.
[7] 梅春雷,刘武发,刘超.基于STM32F417的砂轮动平衡控制系统设计[J].制造业自动化,2014,36(11):130-133.MEI Chunlei,LIU Wufa,LIU Chao.Design of control system for grind wheel balancing based on STM32F417[J].Manufacturing Automation,2014,36(11):130-133.
[8] 宋宝奇,方伟,叶新,等.在轨太阳模拟器双模式控制系统设计[J].计算机测量与控制,2013,21(6):1519-1521.SONG Baoqi,FANG Wei,YE Xin,et al.Design of double modes’s control system of sun’s path simulator on orbit[J].Computer Measurement &Control,2013,21(6):1519-1521.
[9] 严晓照,张兴国.增量式PID控制在温控系统中的应用[J].南通大学学报(自然科学版),2006,5(4):48-51.YAN Xiaozhao,ZHANG Xingguo.Application of increasing PID controlling method in temperature controlling system[J].Journal of Nantong University(Natural Science),2006,5(4):48-51.
[10]刘江文,童敏明,戴冠秀.基于单片机的恒温连续可调型温控系统[J].微计算机信息,2008,24(9-2):48-50.LIU Jiangwen,TONG Minming,DAI Guanxiu.Constantly adjusted temperature controller based on the singlechip[J].Microcomputer Information,2008,24(9-2):48-50.
[11]陈宫,王三胜,张庆荣,等.基于STM32F103VCT6的微位移控制系统设计[J].现代电子技术,2012,35(3):144-146.CHEN Gong,WANG Sansheng,ZHANG Qingrong,et al.Desing of micro-displacement control system based on STM32F103VCT6[J].Modern Electronics Technique,2012,35(3):144-146.
[12]冯媛硕,宋吉江.基于单片机的温湿度检测控制系统设计[J].山东理工大学学报(自然科学版),2014,28(1):19-23.FENG Yuanshuo,SONG Jijiang.The design of temperature and humidity measurement and control system based on singlechip microcomputer[J].Journal of Shandong University of Technology(Natural Science Edition),2014,28(1):19-23.
[13]刘跃辉,王南山,徐云强.基于单片机的温度测量系统的设计[J].现代电子技术,2006(21):103-105.LIU Yuehui,WANG Nanshan,XU Yunqiang.Design of temperature measurement based on single chip[J].Modern Electronics Technique,2006(21):103-105.
[14]何宗虎,张德祥,张玲君.基于单片机的高精度温度测量系统设计[J].现代电子技术,2011,34(9):130-132.HE Zonghu,ZHANG Dexiang,ZHANG Lingjun.Design of high-accuracy temperature detecting system based on single chip microcomputer[J].Modern Electronics Technique,2011,34(9):130-132.
[15]李海真,孙运强,许鸿鹰.高精度多路温度采集模块硬件电路设计[J].电子测试,2008(12):58-64.LI Haizhen,SUN Yunqiang,XU Hongying.Hardware circuit design of multichannel temperature sample module with high precision[J].Electronic Test,2008(12):58-64.
[16]王宝刚,李东洁.基于STC89C52的水温自动控制系统设计[J].制造业自动化,2012,34(9):111-113.WANG Baogang,LI Dongjie.Design of STC89C52-based automatic temperature control system[J].Manufacturing Automation,2012,34(9):111-113.
Design of solar simulator control system based on STM32
ZHANG Jiayu,DOU Jianqin,NIU Huli,CHANG Xiao
(School of Mechanical Engineering,Hebei University of Science and Technology,Shijiazhuang,Hebei 050018,China)
Focus-type solar simulator,which is applied to solar thermal power generation-related test,mainly consists of aircooled system,optical system,mechanical system and control system.In order to eliminate manual installation error of the system and reduce the spot adjustment error,a solar simulator control system is designed based on STM32processing unit combining with PID algorithm,adopting RS485communication standard and using LCD touch screen for input and output units.The system includes modules of xenon light intensity control,xenon lamp cathode temperature control,xenon lamp unit's tilting and translation control.Through construction of the control system,the spot size and focal plane position adjustment,and the xenon lamp cathode temperature measurement and control are achieved,which provides a effective solution to the focus spot overlap problem of converged multi-source systems.
application of automatics;STM32;solar simulator;temperature control;spot focus
1008-1534(2016)01-0052-06
TP27;TH86
A
10.7535/hbgykj.2016yx01010
2015-06-02;
2015-07-15;责任编辑:陈书欣
河北省教育厅青年基金(Q2012073)
张嘉钰(1966—),男,天津人,教授,主要从事机电一体化、CAD/CAM方面的研究。
E-mail:zhangjyv@163.com
张嘉钰,窦建秦,牛虎利,等.基于STM32的太阳模拟器控制系统设计[J].河北工业科技,2016,33(1):52-57.
ZHANG Jiayu,DOU Jianqin,NIU Huli,et al.Design of solar simulator control system besed on STM32[J].Hebei Journal of Industrial Science and Technology,2016,33(1):52-57.
猜你喜欢
环境技术(2021年5期)2021-11-18
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
电子制作(2018年9期)2018-08-04
魅力中国(2016年17期)2016-02-05
中国医疗美容(2015年1期)2015-07-12
