湿地推土机终传动系统动力学仿真分析
2016-09-02 07:42:13张耀娟刘维维
北华大学学报(自然科学版) 2016年3期
张耀娟,成 凯,刘维维
(1.北华大学机械工程学院,吉林吉林 132021;2.吉林大学机械科学与工程学院,吉林长春 130022)
湿地推土机终传动系统动力学仿真分析
张耀娟1,成凯2,刘维维1
(1.北华大学机械工程学院,吉林吉林132021;2.吉林大学机械科学与工程学院,吉林长春130022)
湿地推土机的工作路面是沼泽地面,终传动系统是湿地推土机的重要组成部分,能够将发动机输出的转速和力矩进行减速增矩,将动力传递到行走系统.由于结构形式复杂,如果采用传统的理论方法计算终传动系统各零部件受力形式,计算过程十分复杂.利用多体系统动力学理论建立湿地推土机动力学模型,对直线推土和满载转向两个工况中终传动系统的重要零部件——一级齿轮、二级齿轮、半轴以及大齿圈轮毂进行受力分析,为半轴与大齿圈轮毂的改进提供参考.
湿地推土机;终传动;半轴;大齿圈轮毂;RecurDyn
【引用格式】张耀娟,成凯,刘维维.湿地推土机终传动系统动力学仿真分析[J].北华大学学报(自然科学版),2016,17(3): 409-414.
湿地推土机广泛应用在农业、矿业和建筑业等领域,在国民经济建设中起着至关重要的作用[1].终传动系统是履带推土机的重要组成部分,其结构和性能直接影响着履带推土机的工作性能.在实际工程作业中发现,某型湿地推土机多套终传动系统发生破坏失效,严重地影响整机的工作性能.由于终传动系统结构复杂,采用传统的理论方法很难对终传动系统各零部件的受力形式进行计算.本次研究利用多体系统动力学理论建立湿地推土机动力学模型,对直线推土和满载转向两个工况中终传动系统的重要零部件——一级齿轮、二级齿轮、半轴以及大齿圈轮毂进行受力分析,可为半轴与大齿圈轮毂的改进提供参考.
1 动力学建模
在PRO/E环境下建立湿地推土机三维模型,再将所建立的三维模型以中性文件的形式导入到多体动力学仿真软件Recurdyn中.在Recurdyn中将湿地推土机动力学模型简化为车体、平衡梁、推土装置、行走系统和终传动机构5个系统.
1.1车体模型
简化时将推土机中发动机、座椅、玻璃等实体模型去除,只在计算车体质量和转动惯量参数时将删除部分加入[2].简化后的车体模型见图1.
1.2行走系统模型
行走系统主要包括四轮一带系统、行走架和斜支撑3部分.对于四轮一带系统(驱动轮、导向轮、支重轮、托轮和履带),在多体动力学仿真软件Recurdyn中可以直接建立其动力学模型,各零部件间的约束关系也会自动生成,建模方便[3-4];行走架和斜支撑的动力学模型采用导入的模型.行走系统动力学模型见图2所示.
1.3工作装置模型
在后续的分析中,由于推土阻力是以函数的形式作用在推土铲上,所以仿真结果与工作装置的形状以及相应的液压系统无关,可将相应的液压系统简化.简化后的工作装置动力学模型见图3.
1.4终传动模型
终传动是湿地推土机的重要组成部分,主要由一级齿轮、二级齿轮、半轴、大齿圈轮毂、延伸套等组成.湿地推土机动力的传动路线为发动机输出的转速和力矩经一级齿轮和二级齿轮减速增扭,再通过链轮带动履带转动.具体结构关系见图4.
1.5路面模型
根据湿地推土机的实际工作情况建立沼泽地路面.沼泽地路面动力学模型见图5,根据贝克理论路面参数的设置见表1.
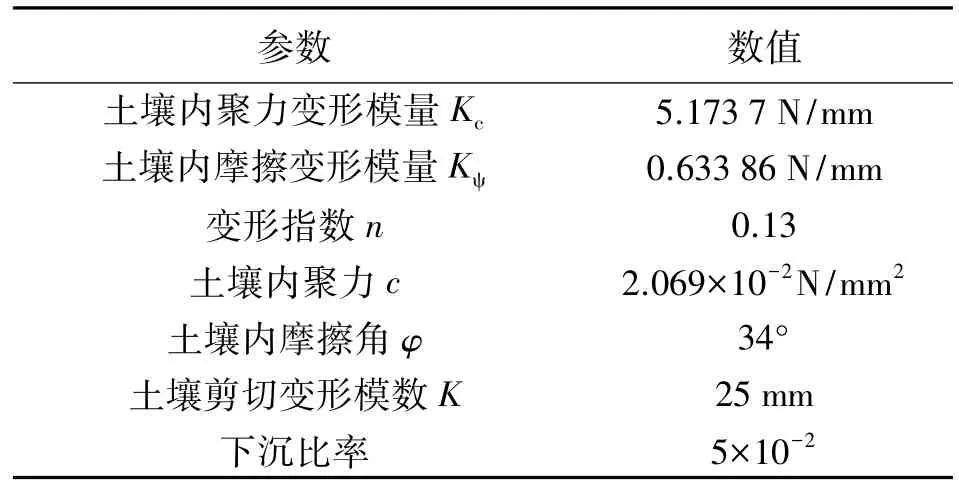
表1 土壤参数Tab.1 Soil parameters
1.6湿地推土机整车模型集成
在Recurdyn中将各简化系统添加相应的约束关系,使其运动原理和运动形式与湿地推土机真实工作情况一致.用到的主要约束有转动副、平动副、球铰等,各零部件的约束形式见表2,整车动力学模型见图6.
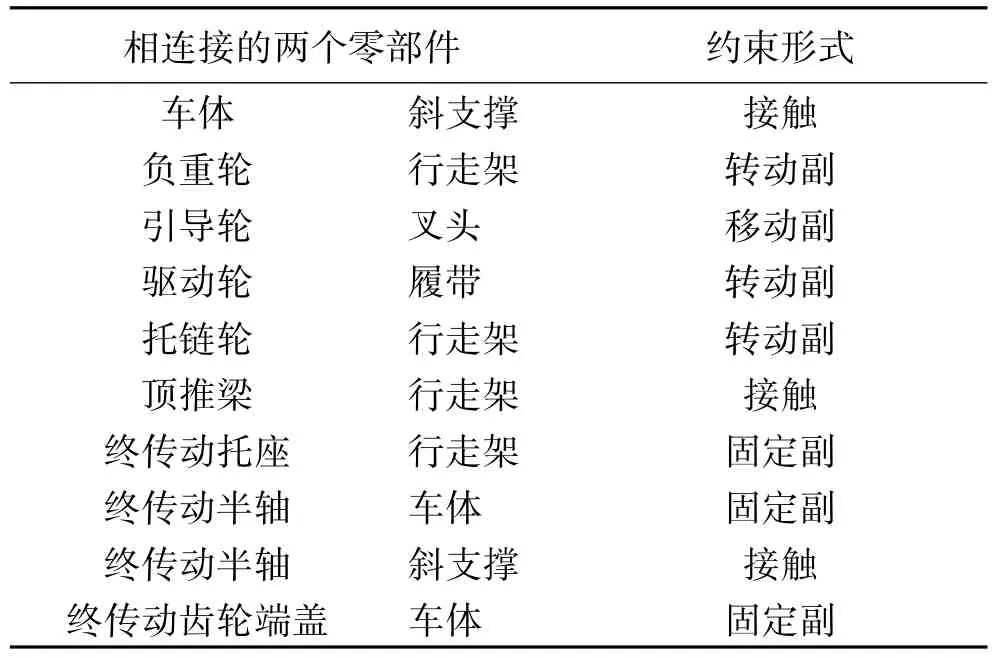
表2 主要零部件的约束形式Tab.2 Constraint form ofmain parts
2 仿真工况确定
湿地推土机的工作路面是沼泽地面,根据湿地推土机在沼泽地面中存在的工况,对直线推土作业循环工况和满载转向推土工况进行分析.其中,直线推土作业循环工况是最主要的工作形式,满载转向推土工况是工作时的一种极恶劣工况,对这两种工况下推土机终传动系统的主要部件进行受力分析.为了在达到一定仿真精确度的同时提高仿真效率,对仿真分析做如下几点假设[5-6]:
1)除了张紧装置与沼泽地路面是弹性元件外,其余零部件都处理为刚性元件,只在相连接的运动副中设置相对刚度.
2)考虑到建模的高效性,将对仿真结果没有影响的液压系统、油箱、螺栓等零部件去掉,只将它们的质量折算到相连接的零部件中.
3 仿真结果
3.1直线推土循环作业工况
直线推土循环作业工况包括铲刀入土、定深集土、水平运土、卸土和倒退5个主要工序.设置仿真过程中推土机在0~3 s由于重力作用落至虚拟地面;3~21.75 s湿地推土机以一定的加速度加速到一挡进行直线推土作业;21.75~31.75 s进行铲刀入土、定深集土、水平运土3个作业过程;31.75~35.5 s进行卸土作业;35.5~40 s以一定的加速度加速至三挡;40 s以后推土机以三挡速度匀速后退.
将推土机作业过程中推土铲受到的土壤阻力分解为水平和竖直两个方向的阻力.在3~21.75 s时推土铲上的工作阻力逐渐增加;在21.75 s时达到最大;在21.75~31.75 s的运土过程中工作阻力减小;31.75~35.5 s推土机开始卸土过程,力减小为0.所施加的水平方向和竖直方向的工作阻力仿真函数分别为
FX=IF(time-40:IF(time-35.5:IF(time-31.75:IF(time-21.75:IF(time-3:0,700,1284*time-3152),6955,6955),6955,-1855*time+65852.5),0,0),0,0);
FY=IF(time-40:IF(time-35.5:IF(time-31.75:IF(time-21.75:IF(time-3:0,4000,-585*time+ 2245),-1956.6,-1956.6),-1956.6,521.76*time-18522.48),0,0),0,0).
提取一级直齿圆柱齿轮啮合处圆周力、径向力曲线,见图7、图8.由图7、图8可以看出:湿地推土机在进行直线推土作业时,一级齿轮的受力随着作用在推土铲上载荷的变化而变化,在21.75 s工作阻力达到最大时,力达到最大,最大值分别为53.2,30.9 kN.
提取二级直齿圆柱齿轮啮合处圆周力、径向力曲线,见图9、图10.由图9、图10可以看出:在进行直线推土作业时,二级齿轮的受力随着作用在推土铲上载荷的变化而变化,在21.75 s工作阻力达到最大时,这时力达到最大,最大值分别为60,64.3 kN.
半轴是以过盈配合的方式压入车体,分析终传动的结构形式可以看出:作用在车体的载荷一部分传递到半轴,另一部分传递到大齿圈轮毂.由于结构复杂,用理论方法计算这两者间载荷的分配形式很复杂,通过湿地推土机动力学仿真模型可以直接提取半轴和大齿圈轮毂各自所分配到的载荷,大大提高了结构分析效率.提取的半轴受力曲线和大齿圈轮毂受力曲线见图11、图12.可以看出:半轴受力的最大值为11.2 k N,大齿圈轮毂受力的最大值为54.3 kN,大齿圈轮毂的受力约为半轴受力的5倍.半轴采用的材料为42 Cr MoH,大齿圈轮毂采用的材料为45Mn,两者相比,半轴材料的机械综合性能优于大齿圈轮毂,但是在直线推土作业工况中分配到半轴上的力远小于大齿圈轮毂的受力,造成了材料浪费.
3.2满载转向工况
湿地型推土机的转向形式为制动转向,即推土机的一侧制动,另一侧以一定的速度行驶实现转向.仿真设置转向过程中一侧行驶速度为0,另一侧以一挡速度行驶.在0~3 s,推土机由于重力作用在地面上静止,左右两侧的驱动函数分别为[7-8]
V1=IF(time-21.75:IF(time-11:IF(time-3:0,-32,1.25*time-35.75),-22,2.05*time-44.6),-32,-32);
V2=IF(time-21.75:IF(time-11:IF(time-3:0,-32,1.25*time-35.75),0,0),-32,-32).
提取一级直齿圆柱齿轮非制动侧啮合处圆周力、径向力曲线,见图13、图14.由图13、图14可以看出:湿地推土机在满载转向工况,一级直齿圆柱齿轮的受力在满载转向过程中波动很大,受力最大值分别为95.6,90.2 kN.
提取二级直齿圆柱齿轮啮合处圆周力、径向力曲线,见图15、图16.由图15、图16可以看出:湿地推土机在满载转向工况,二级直齿圆柱齿轮的受力在满载转向过程中波动很大,受力的最大值分别为95.6,165.2 kN.
提取的半轴受力曲线和大齿圈轮毂受力曲线见图17、图18.可以看出:半轴受力的最大值为18.4 kN,大齿圈轮毂受力的最大值为150 kN.大齿圈轮毂的受力约为半轴受力的8倍,说明在满载转向工况中分配到半轴上的力同样远小于大齿圈轮毂的受力,造成了材料浪费[9-11].
4 结 语
通过建立湿地推土机动力学模型,对其在直线推土作业工况和满载转向两个工况进行仿真分析,分别提取终传动中的重要零部件——一级齿轮、二级齿轮、半轴以及大齿圈轮毂的受力曲线,得到了在两种作业工况下终传动系统重要零部件受力的最大值和受力趋势.另外,通过动力学仿真可以方便快速地得出半轴与大齿圈轮毂的载荷分配关系.通过仿真结果分析可以看出:在直线推土作业和满载转向两个工况中,半轴虽然采用了综合机械性能更好的材料,但受力却远小于大齿圈轮毂的受力,造成了材料浪费.根据仿真结果,提出以下两个方面改进建议:1)半轴的材料采用综合机械性能较低的材料;2)改进终传动的结构形式,使力的分配更加合理,即通过结构改进使半轴的受力与大齿圈轮毂的受力接近.
[1]张耀娟,成凯.履带推土机行走系统推土转向工况仿真[J].北华大学学报(自然科学版),2015,16(5):677-681.
[2]耿宇明.平架推土机履带行走系统仿真与行走架分析[D].长春:吉林大学,2013.
[3]王军,孙大刚,宋勇,等.履带式推土机橡胶减振器冲击特性分析[J].机械设计与制造,2015(2):19-20,24.
[4]张德,邹树梁,唐德文,等.基于RecurDyn的防辐射履带式挖掘机越障性能研究[J].机械设计与制造,2015(5):83-88.
[5]陈伦军,汤何胜.基于故障树推土机转向液压系统可靠性仿真分析[J].煤矿机械,2009,30(8):229-231.
[6]王建春,高继明.履带推土机的差速转向机构[J].工程机械与维修,2012(6):118-120.
[7]杨洪征,沈玉凤,张春明.基于ADAMS的推土机差速转向系统运动学分析[J].山东理工大学学报(自然科学版),2010,24(2):101-104,110.
[8]刘维维.非公路矿用宽体自卸车行驶性能仿真分析[D].长春:吉林大学,2015.
[9]孟祥杰.高驱推土机行走系的结构分析及优化[D].长春:吉林大学,2013.
[10]Yang Congbin,Gu Liang,Lv Weiwei.Study of factors with effects on tracked vehicle driving resistance basis of bekker theory[J]. ICAME,2013,288:80-83.
[11]张耀娟,成凯,周振平,等.履带车辆终传动与行走系统过盈接触[J].吉林大学学报(工学版),2014,44(2):369-378.
【责任编辑:郭伟】
Simulation Analysis on the Final Drive System of Wetland Crawler Bulldozer
Zhang Yaojuan1,Cheng Kai2,Liu Weiwei1
(1.Mechanical Engineering College of Beihua University,Jilin 132021,China;2.Mechanical Science and Engineering College of Jilin University,Changchun 130022,China)
Wetland crawler bulldozer works in swampland. Final drive system as an important part of wetland crawler bulldozer,passes the speed and moment to the walking system.The forces between parts are not easy to simulate by theoretical calculation due to the complex structures. However,they can be simulated easily by dynamic theory.The dynamic model of wetland crawler bulldozer was built.The forces in pushing soil straightly and turning fully loaded are simulated by dynamic theory included single reduction gear,double reduction gear, half axis and large gear ring wheel hub,which provide some preferences for the design of wetland crawler bulldozer.
wetland crawler bulldozer;final drive system;half axis;large gear ring wheel hub;RecurDyn
U415.512
A
1009-4822(2016)03-0409-06
10.11713/j.issn.1009-4822.2016.03.029
2016-03-02
国家科技部国际科技合作项目(2009DFR80010).
张耀娟(1981-),女,博士,讲师,主要从事机械设计与制造研究,E-mail:zhangyaojuan0714@163.com;通信作者:成凯(1962-),男,博士,教授,博士生导师,主要从事工程机械性能与测控技术研究,E-mail:94778754@qq.com.
猜你喜欢
中国造纸(2022年8期)2022-11-24 09:43:38
一重技术(2021年5期)2022-01-18 05:42:12
装备制造技术(2021年4期)2021-08-05 07:39:54
电镀与环保(2018年4期)2018-08-20 03:08:04
电子制作(2018年10期)2018-08-04 03:24:26
中国军转民(2017年6期)2018-01-31 02:23:07
汽车实用技术(2015年8期)2015-12-26 09:01:06
Coco薇(2015年10期)2015-10-19 12:39:43
筑路机械与施工机械化(2015年8期)2015-09-11 06:44:26
筑路机械与施工机械化(2014年8期)2014-03-01 03:01:29