自主式车载捷联惯导行进间对准方案设计
2016-09-01 02:46王新龙
航空兵器 2016年3期
明 轩, 王新龙
(北京航空航天大学 宇航学院, 北京 100191)
自主式车载捷联惯导行进间对准方案设计
明轩, 王新龙
(北京航空航天大学 宇航学院, 北京100191)
车载武器系统行进间初始对准的性能对提高武器系统生存能力有着重要意义。对已有的几种车载捷联惯导行进间对准方法进行论述,并对其适用性进行分析。在此基础上,设计了一种自主式车载捷联惯导行进间对准方案。将里程计航位推算得到的位置信息和利用电子地图进行地形匹配得到的位置信息分别作为观测量,经过分散式信息融合方法,使车载捷联惯导系统能够满足复杂车况下行进间对准快速、精确的要求。
捷联惯导;行进间初始对准;分散滤波;信息融合
0 引 言
惯导行进间初始对准指惯导在载体行进过程中获得精确的载体初始方位和水平姿态信息的过程。 作为一种能够显著提高武器生存能力的关键技术, 行进间初始对准技术一直受到国内外学者的广泛关注。 文献[1-2]以SINS/GPS组合导航系统为依托, 将GPS位置、 速度作为系统观测量实现了行进间对准, 但使用GPS使该方法不具备自主性的对准要求。 文献[3]通过实施两次短时技术停车实现了自主式初始对准, 但两次停车削弱了车载武器的机动优势。 为解决此问题, 文献[4-5]研究了中途不停车的惯性系对准方法, 但该方法在对准过程中无实时滤波, 难以保证对准精度。 文献[6-9]以里程计的航位推算信息作为量测信息, 建立系统方程和量测方程进行最优估计, 完成行进间对准。 但里程计的航位推算过程引入了平台失准角, 导致系统位置误差不具备收敛的趋势。
本文通过比较多种对准方案的适用性和特点, 设计了一种基于惯导/里程计/数字地图组合的自主式车载捷联惯导行进间对准方案。 该方案在实现初始对准的同时, 还能获取精确的位置信息, 能够满足行进间对准的快速性和准确性要求。
1 车载捷联惯导行进间对准方法
与静基座初始对准的状态不同, 在车辆行驶状态下, 载体的位置、 速度、 加速度以及角速度都在不断地发生变化, 其对初始对准的影响主要表现为两个方面: 一是线运动会使惯导基本方程中的对地加速度、 哥式加速度等参量时刻变化, 在运动状态下无法利用加速度计输出数据测得重力加速度的精确信息; 二是路面颠簸和发动机振动使得干扰角速度具有很宽的频带, 陀螺仪输出信号信噪比很低, 无法从陀螺仪输出中将地球自转角速度这一有用信息提取出来。
可见, 在车辆行驶的动基座条件下, 不能单纯依靠陀螺仪和加速度计的直接测量信息进行初始对准, 需要引入测距或测速信息, 以补偿车辆行驶过程中有害加速度对初始对准精度的影响。 这种利用测距或测速信息辅助行进间初始对准方法, 目前主要有行进间惯性系对准方法、 捷联罗经法行进间对准方法[10]、 基于凝固惯性坐标系的行进间对准方法以及基于最优估计的行进间对准方法等。
1.1行进间惯性系对准方法
行进间惯性系对准方法利用两处停车点测量得到的重力矢量以及导航解算的姿态角信息, 根据惯性系对准原理计算本体系和导航系的姿态转换矩阵。 具体地讲, 是将车辆行驶过程中里程计航迹推算得到的两处停车点的相对位移作为初始对准辅助信息, 通过两处测量的重力加速度信息和已知的惯性系中的重力加速度矢量计算方位偏差角, 对行驶过程中利用惯导姿态解算得到的方位角进行补偿, 进而得到较为精确的初始对准姿态阵, 完成初始对准。 具体对准流程如图1所示。

图1行进间惯性系对准原理
该方法行车中需要两次技术停车来进行反馈调平, 测量停车点重力矢量。 两次停车的间隔时间越长, 航迹推算的定位误差越大, 位置偏差的补偿难度也就越大。 因此, 该方法对车速和行车路线的要求比较高。
1.2捷联罗经法行进间对准方法
捷联罗经法行进间对准将平台式惯导系统的实体平台用虚拟的数学平台代替, 如图2所示。 该方法基于经典控制理论方法, 将测速传感器的参考速度信息引入到对准控制回路中, 以消除载体运动对初始对准精度的影响。 最终, 利用对准控制回路对数学平台进行的反馈控制实现初始对准。

图2捷联罗经对准回路
捷联罗经法行进间初始对准对于陀螺的低频干扰、 加速度计的低频干扰、 载体的加速度低频干扰较为敏感, 需要根据不同的行车状态来选取合适的控制参数。 因此该方法对于对准控制回路的要求比较高, 以适应不同的路况条件和车辆的机动能力。
1.3基于凝固惯性坐标系的行进间对准方法


图3基于凝固惯性坐标系的行进间对准方法
该方法将惯性空间坐标系作为过渡坐标系, 引入外测的速度信息, 隔离了载体线运动和角速度对初始对准精度的干扰。 因此, 对准过程中不需要停车, 能够适应多种车辆行驶条件。 但是, 由于测速传感器不能提供精确的实时定位信息, 载体实时经纬度设定为初始时刻经纬度。 随着车辆行驶位移的增加, 对准误差会逐渐增大。
1.4基于最优估计的行进间对准方法
基于最优估计的行进间对准方法是将捷联惯导解算的速度信息与测速传感器测得的速度之差作为Kalman滤波器的量测信息进行滤波解算, 以消除量测误差对初始对准精度的影响, 如图4所示。 通过Kalman滤波器的估计结果对惯导导航解算和测速传感器的测速信息进行反馈校正, 最终使敏感器的信息与惯导输出的信息之差趋于零, 从而实现行进间对准。
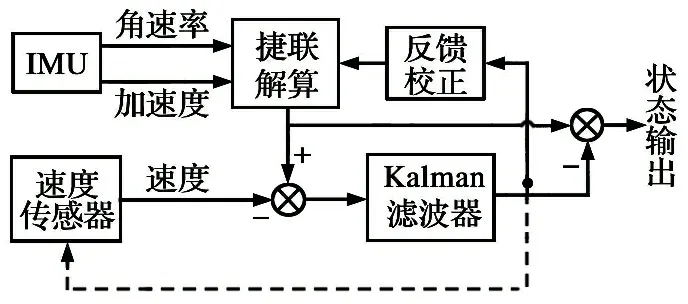
图4最优估计行进间对准原理图
利用最优估计方法进行车载捷联惯导行进间对准, 可以估计加速度计的零偏、 测速传感器标度因数等误差参量, 提高对准精度, 加快对准速度。
2 自主式车载捷联惯导行进间对准方案的设计
通过以上方法的分析可以看出, 基于凝固惯性坐标系的行进间对准不受行车路径和行车速度的限制, 能够适应多种行车条件, 计算方法简单、 可靠。 但其无法对陀螺零漂、 加速度计零偏等误差参数进行实时标定与补偿。 而基于最优估计的行进间对准方法能够对传感器误差参数进行实时在线估计与补偿, 从而提高对准精度, 加快对准速度。 但该方法需要先进行粗对准获取初始姿态矩阵才能进行。 因此, 将两种初始对准方法进行有机结合, 设计了一种车载捷联惯导自主式行进间对准方案, 如图5所示。
整个系统由参考系统、 子系统1、 子系统2和主滤波单元组成。 自主式车载捷联惯导行进间初始对准过程分为粗对准阶段和精对准阶段。 将基于凝固惯性坐标系的行进间对准方法作为行进间粗对准方法, 车辆行驶过程中经过粗对准, 获得粗略的初始姿态矩阵。 在此基础上, 利用滤波单元进行滤波解算, 滤波收敛后获取精确的姿态失准角等信息。 初始对准结束后, 组合导航系统进行方位保持。
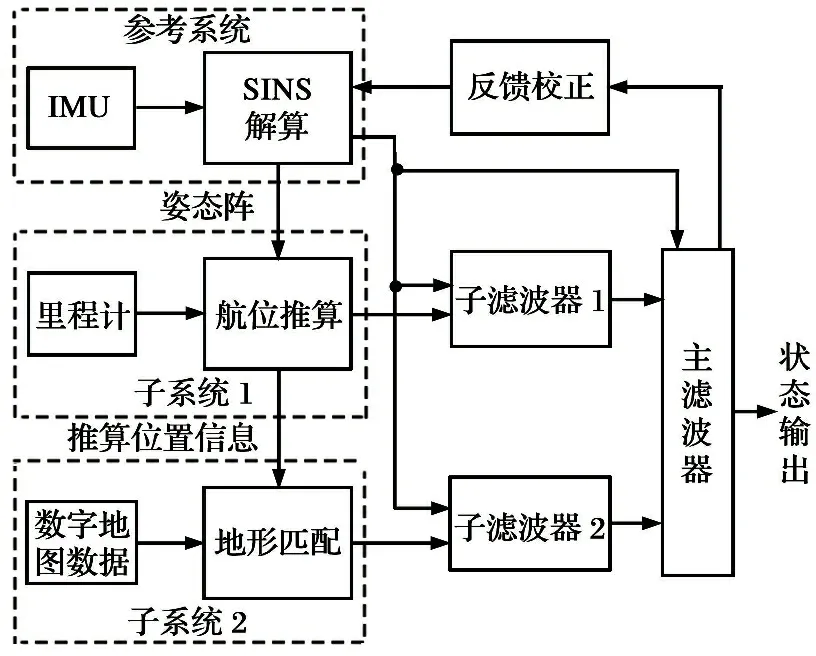
图5车载捷联惯导行进间对准方案原理图
2.1系统组成
(1) 参考系统
捷联惯导系统作为行进间初始对准系统的主参考系统, 包括捷联姿态更新算法、 速度更新算法和位置更新算法。 其敏感器由陀螺仪和加速度计组成, 本方案中采用的是捷联式惯导系统, 陀螺仪和加速度计直接安装在运载车辆上。 因此, 陀螺仪和加速度计的输出分别是载体坐标系下运载车辆相对于惯性空间的角速率和加速度信息。
(2) 子系统1
子系统1由里程计航位推算系统组成。 作为路程测量传感器, 里程计的输出信息为采样间隔时间内载车行驶的路程增量。 通过SINS解算的姿态矩阵, 里程计测量坐标系下得到的里程增量信息被转移到导航坐标系下, 进而通过航位推算算法得到推算的位置信息。 因此, 将捷联惯导的位置输出与里程计的航位推算位置输出之差作为子滤波器1的量测信息, 建立系统模型和量测模型, 组成子滤波器1对系统状态变量进行最优估计。
(3) 子系统2
子系统2由数字地图地形匹配系统组成。 由于航位推算系统利用SINS解算的姿态矩阵来完成航位推算, 因此航位推算系统与SINS具有相同的误差源(相同的初始位置误差和失准角), 造成航位推算系统的位置误差随工作时间的增长呈缓慢发散的趋势。 为了在完成初始对准的同时也可以获取精确的位置信息, 将由数字地图组成的地形匹配系统作为子系统2, 将经过数字地图数据库匹配而获取的位置误差信息作为子滤波器2的量测信息, 建立系统模型和相应的量测模型对系统状态进行最优估计。
(4) 主滤波单元
主滤波器采用联邦滤波算法, 将子滤波器1和子滤波器2的估计信息进行最优融合。
联邦滤波系统各子滤波器的状态方程和量测方程如下所示:
(1)
式中: i=1, 2;Wi(k)和Vi(k)的协方差阵分别为Qi(k)和Ri(k)。
为消除各子系统之间的耦合关系, 把系统的过程噪声总量Q-1与状态估计初始信息P-1均按式(2)和式(3)进行分配:
(2)
(3)
根据“信息守恒”原理, βi和βm满足式(4):
(4)
各子滤波器与主滤波器中的时间更新过程为
(5)
各子滤波器中的量测更新为
(6)
主滤波器中的信息融合过程为
(7)

2.2仿真验证与分析
(1) 仿真条件设置
设定行车总时间为3 341s, 包括加减速、 转弯、 上坡、 下坡等车辆行驶动作; 车辆初始位置为40°N/90°E, 初始高度为0m, 初始速度为0m/s; 陀螺仪为激光陀螺仪, 其常值漂移为0.01 (°)/h, 随机漂移为0.005 (°)/h; 加速度计常值零偏为500μg, 随机漂移为50μg; 陀螺仪和加速度计的数据输出频率为10Hz。 设定捷联惯组初始位置装订误差为10m, 粗对准后水平失准角为30″, 方位失准角为10′; 里程计刻度因数误差为0.01, 里程计速度随机测量噪声为0.1m/s; 数字地图数据库精度为1.5m; 子滤波器1更新时间为100ms, 子滤波器2更新时间为1s。
(2) 结果与分析
根据上述仿真条件, 对自主式车载捷联惯导行进间初始对准系统进行仿真验证。 水平失准角估计误差如图6所示, 方位失准角估计误差如图7所示。
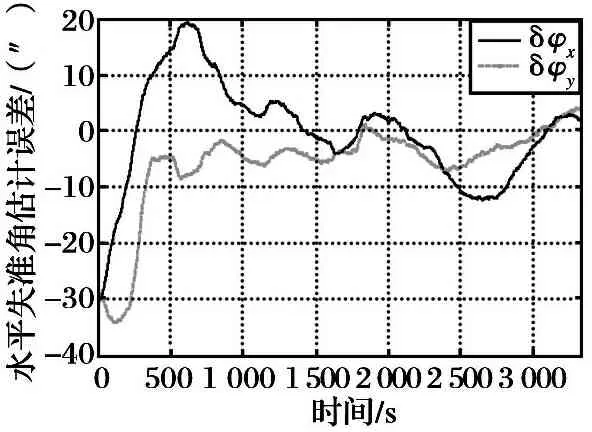
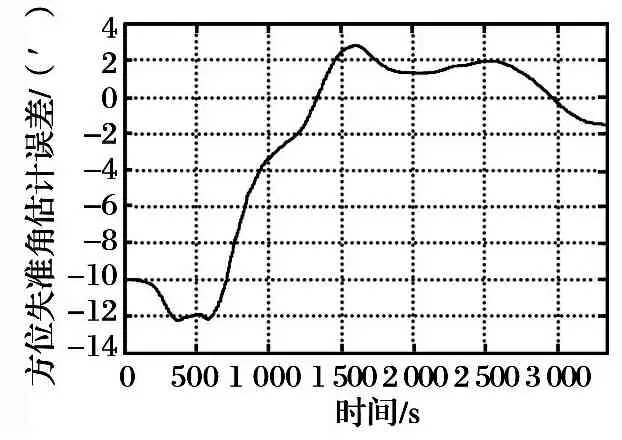
图6 水平失准角估计误差
图7方位失准角估计误差
由图6~7可以看出, 1 000s以后, 水平失准角估计误差基本在10″以内; 而方位失准角估计时间较长, 在1 000s以后收敛到4′以内。 从原理上分析, 里程计航位推算使用了捷联惯导解算的姿态矩阵, 失准角影响了航位推算的误差大小, 所以失准角的估计效果较好。 但也正因此, 传统的惯导/里程计的组合方式得到的航位推算位置误差不具备收敛趋势。 为了解决此问题, 引入数字地图地形匹配信息进行位置校正, 如图8~9所示。 由图8~9可以看出, 位置误差明显呈收敛趋势, 使得初始对准系统在完成初始对准的同时, 获得了精确的位置信息。


图8 纬度位置误差
图9经度位置误差
初始对准系统能够对部分传感器误差参数进行标定。 其中, 该系统在载车行驶过程中能够估计出加速度计零偏参数。 水平方向的加速度计零偏的估计精度在800s后可达10%以内, 天向加速度计的零偏收敛速度较快, 在300s的估计时间内估计误差即可收敛到1%, 如图10所示。

图10加速度计零偏估计曲线
综合上述仿真结果, 该系统能够满足行进间对准的快速性和准确性要求。 在完成初始对准的同时, 还可以获取精确的位置信息。
3 结 论
本文论述了目前典型的四种行进间对准方法, 并对其适用性和特点进行了分析。 在此基础上, 设计了一种基于惯导/里程计/数字地图组合的自主式车载捷联惯导行进间对准方案, 通过仿真实验验证了该方案能够满足行进间对准的快速性和准确性要求。
[1] 张昊宇, 王玮. 基于车载组合导航系统的行进间对准仿真研究[J].计算机仿真, 2014(5): 147-151.
[2] 吴非. 车载激光捷联惯导系统动基座初始对准技术研究[D]. 长沙: 国防科学技术大学, 2007.
[3] 练军想, 吴文启, 吴美平, 等. 车载SINS行进间初始对准方法[J]. 中国惯性技术学报, 2007, 15(2): 155-159.
[4] 严恭敏, 秦永元, 卫育新, 等. 一种适用于SINS动基座初始对准的新算法[J]. 系统工程与电子技术, 2009, 31(3): 634-637.
[5] 严恭敏, 翁浚, 白亮, 等. 基于惯性参考系的动基座初始对准与定位导航[J]. 系统工程与电子技术, 2011, 33(3): 618-621.
[6] 严恭敏. 车载自主定位定向系统研究[D].西安: 西北工业大学, 2006.
[7] 肖烜, 王清哲, 付梦印, 等. 里程计辅助陆用惯导行进间对准方法[J]. 中国惯性技术学报, 2012, 20(2): 140-145.
[8] 缪玲娟, 高伟熙, 沈军, 等. 基于惯性系采用Kalman滤波的车载SINS行进间对准方法[J]. 兵工学报, 2013, 34(2): 143-148.
[9] 谢波, 江一夫, 严恭敏, 等.捷联惯导基于地球系的动基座间接精对准算法[J]. 中国惯性技术学报, 2014, 22(5): 593-596.
[10] 刘义亭, 徐晓苏, 张涛, 等. 基于外参考速度辅助的行进间罗经法对准[J].中国惯性技术学报, 2015, 23(2): 165-171.
Design of Autonomous SINS In-Motion Alignment Scheme for Land-Vehicles
Ming Xuan, Wang Xinlong
(School of Astronautics, Beihang University, Beijing 100191, China)
The performance of in-motion alignment for land-vehicle weapon system plays an important role in improving the survival capability of weapon system. Several strapdown inertial navigation system (SINS) in-motion alignment methods for land-vehicles are discussed, and their applicability is analyzed. Based on these, an autonomous SINS in-motion alignment scheme for land-vehicles is designed. The position information reckoned by odometer and the position information got via terrain matching algorithm are regarded as the estimation information. Through multiple information fusion by distributed filtering, the land-vehicle SINS can meet fast and accurate demand of in-motion alignment under complex marching environment.
SINS; in-motion alignment; distributed filtering; information fusion
10.19297/j.cnki.41-1228/tj.2016.03.007
2015-07-24
国家自然科学基金项目(61233005); 航空科学基金项目(20130151004; 2015ZC51038)
明轩(1992-), 男, 山东德州人, 硕士研究生, 研究方向为惯性导航与组合导航技术。
V249.32+8
A
1673-5048(2016)03-0030-05
猜你喜欢
导航定位学报(2022年5期)2022-10-13
舰船科学技术(2022年10期)2022-06-17
数字海洋与水下攻防(2020年5期)2021-01-04
软件导刊(2019年12期)2019-02-07
北京航空航天大学学报(2018年1期)2018-04-20
火力与指挥控制(2018年1期)2018-03-02
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
导航定位与授时(2016年6期)2016-03-16
火控雷达技术(2016年1期)2016-02-06