
某小型无人机编队控制器设计及试飞验证
2016-08-30 06:49梁瑾宋栋梁李嘉
飞行力学 2016年4期
梁瑾, 宋栋梁, 李嘉
(西安飞行自动控制研究所 飞行器控制一体化技术国防科技重点实验室, 陕西 西安 710065)
某小型无人机编队控制器设计及试飞验证
梁瑾, 宋栋梁, 李嘉
(西安飞行自动控制研究所 飞行器控制一体化技术国防科技重点实验室, 陕西 西安 710065)
以某小型固定翼无人机作为研究平台,按前向、侧向和垂直方向3个通道设计僚机编队控制器。利用自动驾驶仪的航路飞行模态简化侧向通道编队控制器的设计,并采用在长机航向角发生较大变化时加入基于视线方位角的方法,使僚机保持编队精度。试验结果表明,所提出的编队算法是可用的,并能够很好地控制无人机的编队飞行精度。
小型无人机; 编队控制器; 视线方位角; 自主编队飞行
0 引言
无人机编队飞行,即多架无人机为适应任务要求而进行的某种队形排列和任务分配的组织模式,包括编队飞行的队形产生、保持和变换,也包括飞行任务的规划和组织[1]。编队控制方法通常包括“长机-僚机”方式的编队控制、基于行为方式的编队控制和虚拟结构方式的编队控制[2]。在实际应用中,由于长-僚机编队模式的简便性和实用性而被广泛采用。事实上,基于这种模式已经设计出了多种形式的编队控制器,但大都从仿真验证的角度进行设计并取得不错的仿真结果,而在实际飞行中仍存在一些问题尚未解决。
本文以某小型固定翼无人机作为平台,从飞行的可实现性角度出发,设计了一种便于实现的编队算法,并针对长机出现航向角变化较大的情况,设计了一种基于视线方位角的编队改进方法。通过建立试飞环境及两架机编队飞行试验,充分验证了算法的有效性和可实现性。
1 编队算法设计与优化
1.1编队算法设计
以两架机编队飞行为研究对象,僚机与长机的相对关系如图1所示[3-5]。,以僚机为中心,长机速度方向为x轴,y轴在水平面上,与x轴垂直且在x轴右侧。得到相对运动关系式:
(1)
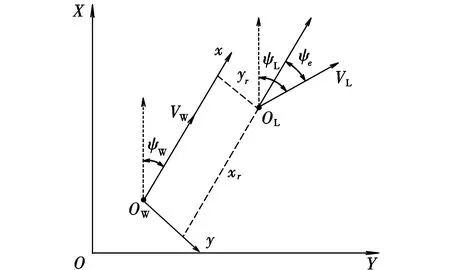
图1 僚机的参考坐标系Fig.1 Reference coordinate system of the wing
式中:(x,y)为长机相对于僚机的位置;ψe为长、僚机的航向角误差,且ψe≡ψL-ψW。
在OXY坐标系中,可以通过已知的长机位置得到僚机的期望位置:
(2)
式中:(XW,Ex,YW,Ex,VW,Ex,ψW,Ex)为当前僚机期望位置;(XL,YL,V,ψL)为当前长机位置;(xr,yr)为僚机参考坐标系中,给定编队队形中期望的僚机与长机相对位置。
由僚机期望状态和当前状态,可以计算出僚机的状态误差(在O′X′Y′坐标系中),如图2所示。
(3)
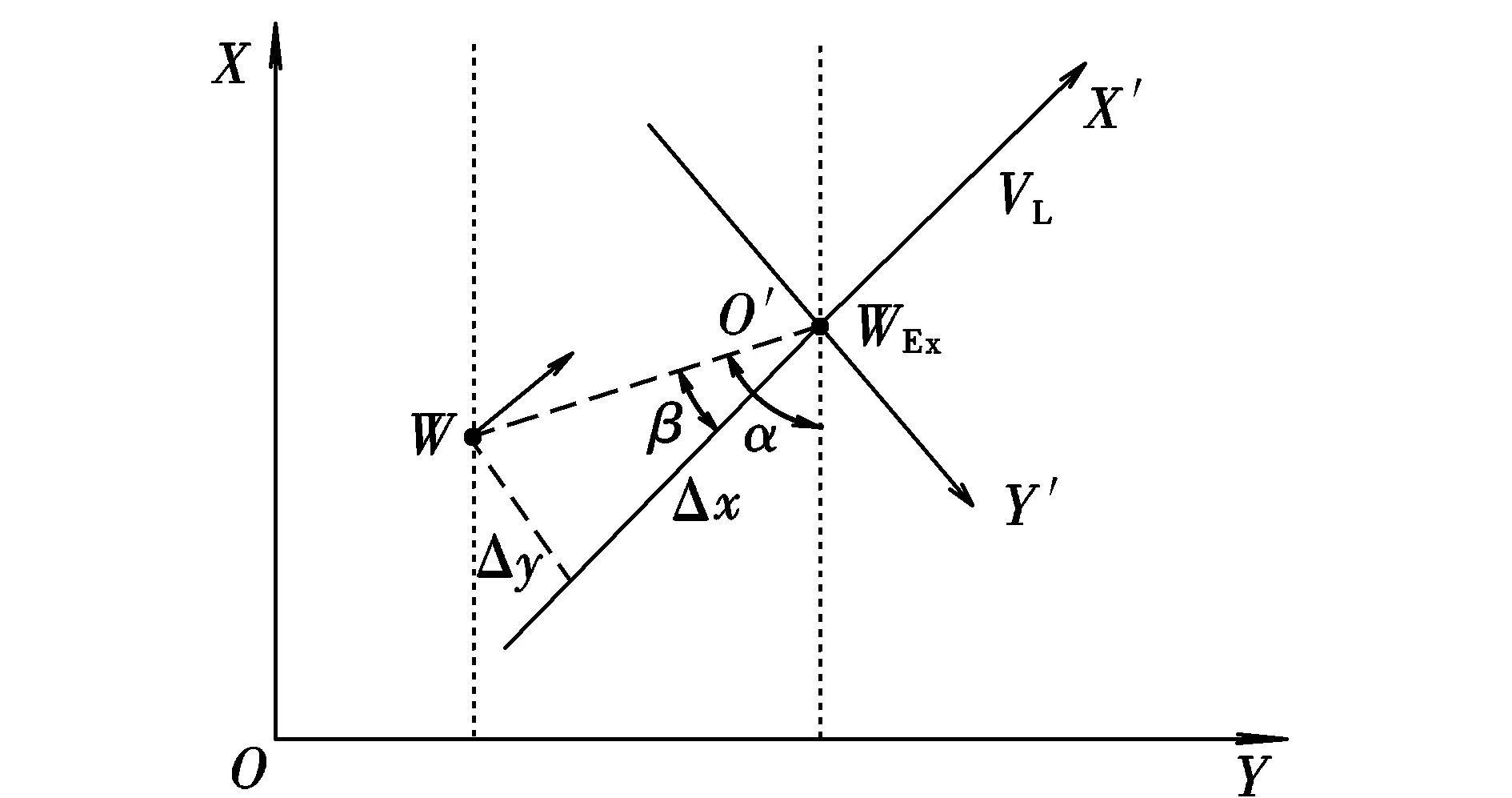
图2 僚机期望状态和僚机当前状态示意图Fig.2 Expected state and current state of the wing
式中:(XW,Ex,YW,Ex,VW,Ex,ψW,Ex,HW,Ex)为当前僚机期望状态;(XW,YW,VW,ψW,HW)为当前僚机状态;(Δx,Δy,ΔH)为僚机参考系中僚机与其期望的位置差。
控制目标是使僚机当前状态与其期望状态重叠,即:

(4)
1.2编队算法实现
要实现上述控制目标,将编队控制器按照前向、侧向和垂直方向3个通道分别进行设计[6-7]。
(1)前向通道:控制量为Δx和ΔV,即整体误差为:
(5)
VWC作为自动驾驶仪速度保持模态的给定值,即可实现前向通道的控制:
(6)
(2)侧向通道:控制量为Δy和Δψ,直接作为自动驾驶仪航路飞行模态的输入量,通过式(7)的组合转化为滚转角保持模态的给定值,即可实现侧向通道的控制。
(7)
(3)垂直通道:控制量为ΔH,HWC作为自动驾驶高度保持模态的给定值,即可实现垂直通道的控制。
(8)
1.3编队算法优化
当长机航向角发生较大的变化(如转弯)时,僚机为了保持编队位置则必须快速调整航向和速度;转弯结束后,僚机又需要快速减速并重新调整航向角至编队位置。然而速度的控制是一个慢变的过程,导致转弯时的编队效果很不理想;因此提出一种基于视线方位角的转弯编队算法[8-9],具体为:
(9)
式中:ρWL为僚机当前状态到期望状态的水平距离;ϑWL∈(-π,π]为僚机当前状态与期望状态的视线方位角,逆向为正。
进而得到速度指令及航迹偏航角指令:
(10)

2 试飞验证系统
2.1编队场景设计
如图3所示,无人机编队飞行试验航线设定7个航点:1为起飞点,也是飞机的着陆点;2为平飞段进入点,飞机要满足一定高度;3为巡航段进入点,依次飞过航点4,5,6;7为着陆段进入点,飞行高度逐渐下降。
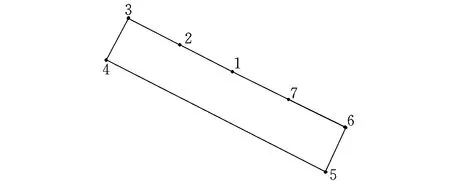
图3 飞行试验航线二维示意图Fig.3 Two dimensional map of flight test route
2.2小型无人机平台
本文采用如图4所示的小型固定翼无人机,平台相关参数为:翼展长2 m,机长1.8 m;动力部分电源采用3 s/2 200 mAh锂电池,2个980 kV电机,桨直径20 cm,桨距45°;空机重量1.2 kg,最大起飞重量2.1 kg;离地速度6 m/s,平飞速度10 m/s,续航时间8 min。

图4 小型固定翼无人机Fig.4 The small fixed-wing UAV
假设平台已具备以下能力:
(1)已加装DGPS装置,用于测量自身的位置信息和姿态信息等;
(2)已加装通信设备,即数据链,僚机可接收长机实时发送的状态信息;
(3)已具备全流程自主飞行能力,即全模态的自动驾驶仪。
2.3试飞平台
验证机系统的整体架构如图5所示。
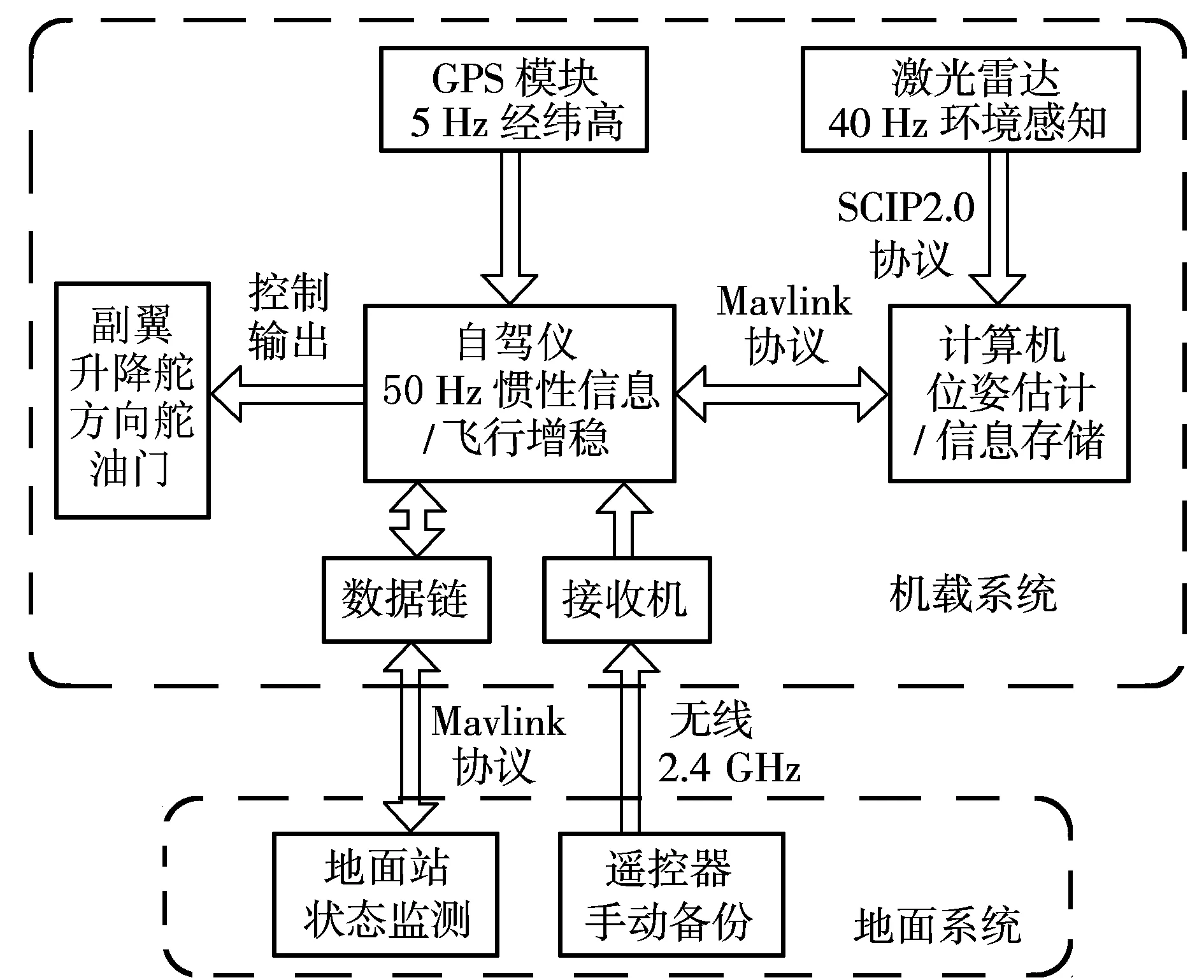
图5 验证机系统架构Fig.5 System frame on tested aircraft
验证机系统分为机载系统与地面系统两部分:
(1)机载系统以MIO-2261N计算机和自动驾驶仪为核心。计算机的主要功能为位置解算、航向估计和状态存储。自动驾驶仪的主要功能是由板载IMU解算姿态,再根据计算机发来的位置信息生成控制指令,控制飞机飞行。机载系统通过XTend数据链与地面站实现双向交互。
(2)地面系统包括地面站和遥控器两部分。地面站采用自主研发的小型无人机便携式地面站,配有Xtend数据链与无人机实现数据互联。地面站安装Mission Planner 软件,可实时监控飞行状态和参数遥调等任务,保障飞机飞行。遥控器采用日本FUTABA公司的十通道遥控器。
3 试验结果及分析
基于上述平台,采用优化编队算法实现双机编队协同飞行。飞行中,僚机在长机正后方10 m的位置,试验过程如下:
(1)起飞阶段,长机、僚机分别按照预定航线自主飞行;
(2)长机飞行高度达到30 m,双机进入编队协同状态;
(3)待长机自主降落时,僚机退出编队协同状态,回到自主飞行状态。
试验结果如图6所示。图中:圆点表示长机实际飞行轨迹;圆圈表示僚机实际飞行轨迹;1点为起飞点;2点为编队协同进入点;3点为编队协同退出点。

图6 双机编队试验结果Fig.6 Results of double aircraft formation flight test
记录的飞行数据如图7所示。图中:HL为长机实际飞行高度;HW,Ex为僚机的期望飞行高度,由长机实时飞行高度计算得到;HW为僚机实际飞行高度;ψL为长机实时航向;ψW为僚机实时航向;Δψ为僚机与长机之间的航向差;VL为长机实时飞行速度;VW,Ex为僚机期望的飞行速度,可根据僚机与长机之间的状态差通过优化编队算法得到;VW为僚机实时飞行速度。
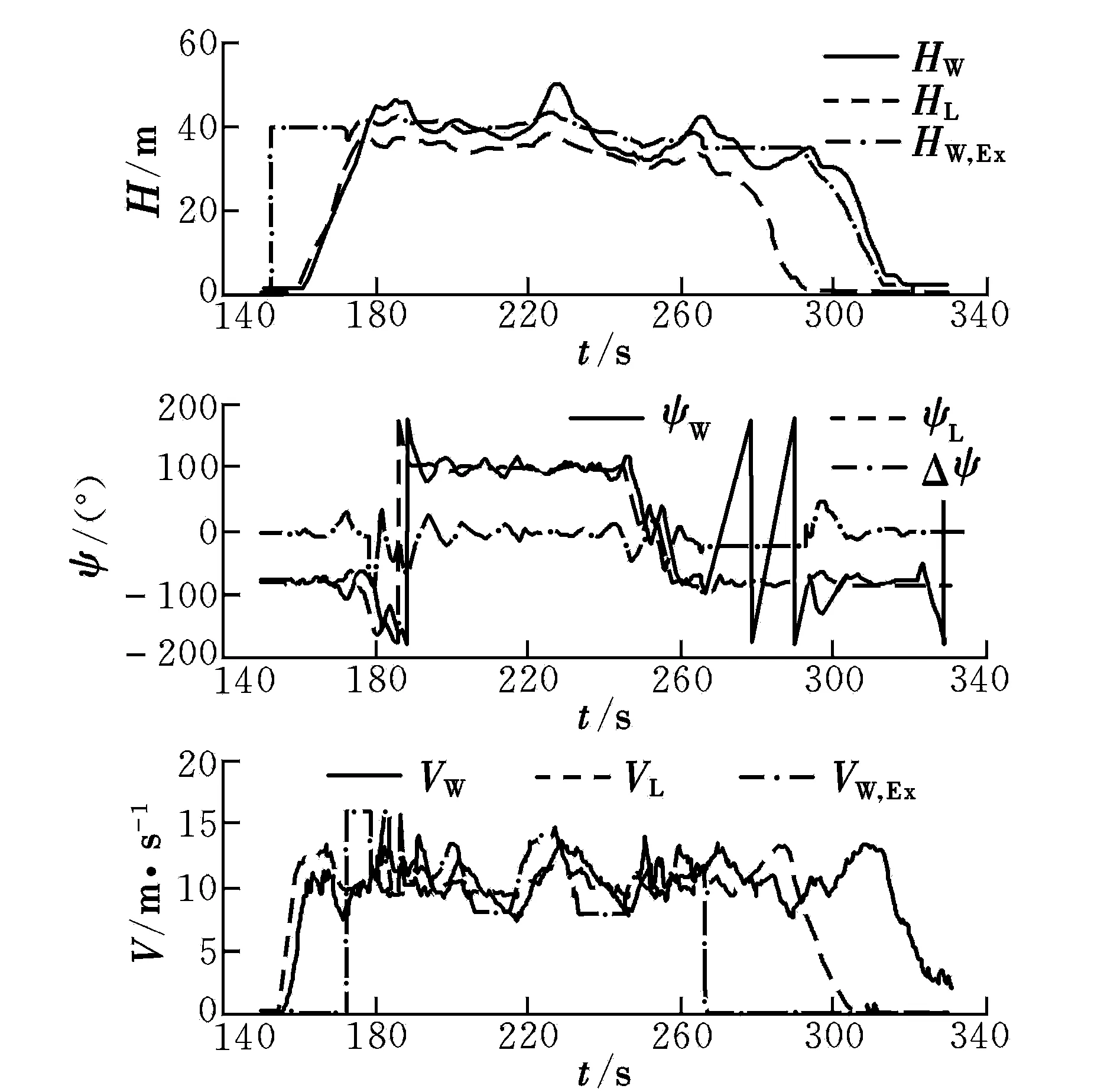
图7 双机编队飞行试验数据Fig.7 Datas of double aircraft formation flight test
由图7可以看出:大约在152 s时,僚机期望高度为40 m,即进入编队协同保持,在268 s时退出编队系统保持;控制系统能够很好地控制僚机的高度保持在期望高度上,同时使僚机的航向精确地跟踪长机航向,即迅速修正至0,但会出现一定的时延;速度控制是一个慢变过程,需要通过一定的调节时间才能达到期望的速度。因此,通过试验验证可以看出,优化后的编队算法可以很好地实现编队协同飞行。
4 结束语
本文以某小型无人机为研究平台,从实际飞行验证的角度出发,利用自动驾驶仪的功能模态简化编队控制器的设计过程,同时针对转弯航向角变化较大的情况设计基于视线方位角的编队控制器,实现多无人机全流程自主编队控制技术的研究与实现。通过试验平台验证了该技术是可用的,并能够很好地控制无人机的编队飞行精度,为自主控制技术储备经验,同时为无人机紧密编队控制等相关技术做好前期验证工作。
[1]Pachter M,D’Azzo J,Dargan J L,et al.Automatic formation flight control[J].Journal of Guidance,Control,and Dynamics,1994,17(6):1380-1383.
[2]李文皓,张珩.无人机编队飞行技术的研究现状与展望[J].飞行力学,2007,25(1):9-11.
[3]宗令蓓,谢凡,秦世引.基于MAS的无人机编队飞行智能优化控制[J].航空学报,2008,29(5):1326-1333.
[4]Lavretsky E.F/A18 autonomous formation flightcontrol system design[C]//Proceedings of the AIAA Guidance,Navigation and Control Conference and Exhibit.Monterey,USA:AIAA,2002.
[5]Sinsley L,Miller A,Long N,et al.An intelligent controller for collaborative unmanned air vehicles [C]//Proceedings of the 2007 IEEE Symposium on Computational Intelligence in Security and Defense Applications.Honolulu,USA:IEEE,2007:139-144.
[6]Giulietti F,Pollini L,Innocenti M.Autonomous formation flight[J].IEEE Control Systems Magazine,2000,20(4):34-44.
[7]赵锋,杨伟,杨朝旭.无人机紧密编队飞行控制仿真研究[J].航空科学技术,2012(5):14-17.
[8]Tank Mi J,Park C S,Ryoo C K.Line-of-sight guidance laws for formation flight[J].Journal of Guidance,Control,and Dynamics,2005,28(4):708-716.
[9]周绍磊,周超,陈洁.基于预测控制方法的UAV视觉编队飞行控制律设计[J].电光与控制,2013,20(1):9-13.
(编辑:李怡)
Design and flight test for formation control laws based on small UAVs
LIANG Jin, SONG Dong-liang, LI Jia
(National Key Laboratory of Science and Technology on Flight Control Integration, Xi’an Flight Automatic Control Research Institute, Xi’an 710065, China)
The research is based on the small fixed-wing unmanned air vehicles in this paper. Three types of formation control laws are designed, covering forward, lateral and vertical motion respectively. The route flight mode in autopilot system is used in the lateral motion to simplify formation control laws. When leader’s yaw changes a lot, a promoted method on line-of-sight guidance laws are proposed. Flight tests show that the formation control laws promoted in this paper are valid and useful for keeping the accuracy in formation flight.
small UAV; formation control laws; line-of-sight; autonomous formation flight
2015-09-11;
2016-02-18; 网络出版时间:2016-02-29 16:37
梁瑾(1985-),女,山东肥城人,工程师,硕士,研究方向为导航、制导与控制。
V249.1
A
1002-0853(2016)04-0073-04
猜你喜欢
军民两用技术与产品(2021年8期)2021-11-24
小哥白尼(军事科学)(2021年4期)2021-07-28
西安航空学院学报(2020年5期)2020-12-08
小学科学(学生版)(2020年8期)2020-08-24
小哥白尼·趣味科学画报(2020年1期)2020-06-09
中国惯性技术学报(2018年4期)2018-11-08
时代青年(上半月)(2017年1期)2017-02-09
山东冶金(2015年5期)2015-12-10
电子设计工程(2015年6期)2015-02-27
汽车科技(2014年6期)2014-03-11
