无密封电动机在深海声学释放器中应用的可行性研究
2016-08-30 07:00:54朴仁俊张航悦
实验技术与管理 2016年7期
徐 行, 王 猛, 朴仁俊, 张 婧, 张航悦
(中国地质大学(北京) 地球物理与信息技术学院, 北京 100083)
无密封电动机在深海声学释放器中应用的可行性研究
徐行, 王猛, 朴仁俊, 张婧, 张航悦
(中国地质大学(北京) 地球物理与信息技术学院, 北京100083)
分析了传统深海声学释放器存在体积大、重量大、成本高以及电机旋转式声学释放器存在的动密封困难等问题,提出了基于无密封电机的深海声学释放器总体方案设计,将控制电机置于承压密封舱外部以避开动密封困难的难题,并且减小声学释放器的体积和重量,降低成本。确定采用二相混合式步进电机作为声学释放器的控制电机,并从步进电机的结构、材质、工作原理等方面,讨论了深海条件下无密封步进电动机的耐压、绝缘、防腐等问题。经理论分析和盐水槽实验验证,在深海条件下基于无密封电机的声学释放器在中短期时间内可正常工作。
无密封电动机; 深海条件; 声学释放器; 防腐; 绝缘; 耐压
深海声学释放器是应用水声通信原理,通过一对水声换能器进行通信,控制释放机构执行脱钩动作,释放锚定沉块,实现浮体带着仪器上浮的装置[1]。国外以美国TeledyneBenthos公司、英国Sonardyne公司为代表的世界先进海洋设备设计制造商,已研制出较为成熟的水下声学释放器。目前国内对于深海声学释放器的研制能力相比国外还很薄弱,生产的声学释放器可靠性不高[2-3]。为保证其他重要海试设备的回收,目前国内使用的声学释放器几乎全靠进口,每年需耗费大量的外汇,但是所购买的声学释放器仍然面临体积大、重量大、成本高等问题。
电机旋转式声学释放器是目前广泛应用的一种声学释放器,制备电机旋转式声学释放器的关键技术之一就在于电机旋转轴运动过程中的密封(又称动密封),其涉及到释放载荷、最大工作水深、释放器外壳材料等性能。动密封处理不好,在试压和海试过程中漏水,就会导致工作水深不能到达预定的设计值[4]。
为解决现有声学释放器体积大、重量大、成本高以及动密封困难的问题,本文将电机不密封直接置于海水中,设计制造出基于无密封电机的声学释放器。本声学释放器绕开直接从舱内引出机械旋转装置的动密封难题,直接将电机全部浸入海水中,减小了承压密封舱的体积与重量,从而减小了整个声学释放器的体积、重量和成本。
1 基于无密封电机的声学释放器总体方案设计
传统电机旋转式声学释放器由水上分机与水下分机两部分组成,通过一对水声换能器相互进行通信[1]。当水下设备需要回收时,水上分机发出释放指令并通过声学信号传递给水下分机部分,由声学换能器将声信号转换为电信号[5],通过水密电缆传到声学释放器的承压密封舱内。承压密封舱内装有信号解码模块、电池组、电机驱动模块以及低速高扭矩电机。信号通过信号解码模块解码后,传递至电机驱动模块,控制电动机运转,经过一系列机械装置的转换,使得重物释放。传统电机旋转式声学释放器的难点与关键技术之一就在于电机旋转轴与承压密封舱外部的机械释放装置的连接所涉及到的动密封问题。
如图1所示,基于无密封电机的声学释放器与传统电机旋转式声学释放器的不同之处体现在:传统电机旋转式声学释放器的控制电机在承压密封舱内,而基于无密封电机的声学释放器的控制电机在承压密封舱外。无密封电机的声学释放器的电机与承压密封舱内电机驱动模块采用从承压密封舱内引出的控制线进行连接,有效地避免了传统电机旋转式声学释放器直接从密封舱内引出机械旋转装置的动密封难题,可用普通承压密封舱取代具有动密封技术的承压密封舱,以降低成本。即使每次下水之前均更换为新电机,其成本也相对低廉。此外,将电动机置于舱外,有效地减小了承压密封舱的体积与重量。声学释放器的体积和重量大部分源于承压密封舱,故将电机置于舱外,也有效地减小了整个声学释放器的体积和重量,从而进一步降低了成本。以美国TeledyneBenthos公司为例,其生产的代表性声学释放器的尺寸为660mm×150mm,在水中的质量为25kg,价格约3万美元。而基于无密封电机的声学释放器的尺寸可以控制在300mm×100mm,在水中的质量约为5kg。

图1 声学释放器设计方案对比
然而,将电机无密封直接置于舱外,虽然避开了动密封的难题,却面临了耐压、防腐、漏电等一系列新问题,且选用哪一种类型的电机也直接决定了声学释放器能否有效控制释放机构执行脱钩动作。因此,本文有必要对影响深海条件下无密封电动机正常工作的因素进行详尽的分析并给出相应的解决方案。
2 影响无密封电机正常工作的因素分析
海水是一种富含有多种阴、阳离子的混合溶液,具有高盐度、高电导率、强腐蚀性等特点。另外,在深海条件下,海底环境还具有很大的压强,在空气中能运转的电机,在深海条件下却不一定能够工作。此外,声学释放器的机械释放触发机构也要求电机能够实现准确定位和调速。因此,选择哪种类型的电机,怎样做好电机的耐压、防腐、绝缘处理,都将决定无密封电机在深海条件下能否工作。本文将从电动机的选型、耐压、防腐、绝缘这四个方面着重讨论无密封电动机在深海条件下工作是否可行。
2.1电机的选型
基于无密封电机的声学释放器将电机出力轴与机械释放装置进行巧妙的连接,当电机运转时,带动机械释放装置进行一系列的机械转换,使配重块脱钩释放。这一过程对电机的运转角度和速度有着较严格的要求。
步进电机是将数字式电脉冲信号转化为机械角位移的执行机构,步进驱动器每接收到一个脉冲信号,就驱动步进电机按设定的方向转动一个固定的角度。因此可以通过控制输入步进驱动器的脉冲个数来控制角位移量,从而达到准确定位的目的;还可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的[6]。除了控制性能好之外,步进电机还具有惯量低、抗干扰能力强、无累积误差等特点,可以满足声学释放器的要求。本文采用二相混合式步进电机(见图2)作为声学释放器的控制电机[7]。

图2 混合式步进电动机结构
目前市场上的混合式步进电机的零部件材质分别为:不导磁的前后端盖为铝合金材质;前后端轴承为防锈性能好的不锈钢轴承;不导磁转轴为不导磁的不锈钢材质;第一段转子、第二段转子以及定子均是软磁材料,由硅钢片叠压而成;第一段和第二段转子中间的永磁体一般为磁性非常好的钕铁硼材料;定子励磁绕组为漆包线。
2.2深海环境下步进电机的耐压分析
随着海水深度的增加,海水压强会越来越大。Myers、Holm和McAllister考虑了体积模量的作用对不同深处海水的密度的影响,推荐使用下述公式来估算工作水深的压力[4]:
式中,h为海水的深度,p为该水深处的表计压力(加上大气即为绝对压力,单位为MPa)。一般情况下,如果忽略温度、含盐量和因体积弹性模量的改变引起的海水密度变化,每10m深水等于一个海平面大气压。在海下4 000m,海水的压力约为40MPa。这相当于将4 000t重的东西方在1m2的桌子上桌子所承受的压力大小。因此,将声学释放器至于深海中,必须考虑耐压问题。
对于固体材质而言,当其完全浸没于海水中时,只要各个部件内部没有气泡,没有产生内外压差,在理论上是不存在耐压问题的。故只要在步进电机的质量上进行把关,保证其每个零部件内部没有气泡,就无需考虑它的耐压问题。
对于本文所讨论的基于无密封电机的声学释放器,需要着重考虑耐压问题的是其承压密封舱。这也是本文提出将电机裸露在海水中以避开动密封技术难题的原因之一,将电机置于承压密封舱之外,只需通过
舱体端盖水密接插件来保证内外信息的传递,有效地缓解了因为深海压力带来的承压密封舱密封困难的问题。而深海耐压仪器舱的设计已超出本文所要讨论的范围,故在此不做详细的说明。
2.3深海环境下步进电机的防腐分析
步进电机的零部件基本上都是金属,而金属材料在深海中的腐蚀因素有很多,包括化学因素(溶解氧含量、温度、含盐度等);物理因素(压力、流速);生物因素、区域因素等[8]。若直接将市场上已有的步进电机至于深海中,必然会面临一系列的腐蚀问题。
有研究表明,深海环境下金属腐蚀速率顺序为:低碳钢腐蚀速率>铜镍合金腐蚀速率>黄铜腐蚀速率>铜腐蚀速率>不锈钢腐蚀速率[9]。316L奥氏体不锈钢不仅耐点蚀、耐高温、抗蠕变,还具有不导磁的特性,可用于制备步进电机的前后端轴承、不导磁转轴以及不导磁前、后端盖。北京科技大学对316L钢钝化膜光电子能谱进行研究发现,不锈钢钝化是表面层由于某种原因溶解与水分子的吸附,在氧化剂的催化作用下,形成氧化物与氢氧化物,并与组成不锈钢的Cr、Ni、Mo元素发生转化反应,最终形成稳定的相膜,阻止膜的破坏与腐蚀的发生。其部分化学反应方程式[10]为:
FeOOH+Cr+H2O=CrOOH+Fe·H2O
2 FeOOH=Fe2O3+H2O
2 CrOOH=Cr2O3+H2O
MO+3FeO+3H2O =MOO3+3Fe·H2O
Ni+FeO+2H2O=NIO+ Fe·H2O
为了解深海压力作用对316L不锈钢腐蚀行为产生的影响,通过随机分析理论研究静水压力对316L不锈钢点蚀击破电位的影响发现,9.06MPa(80atm)压力下点蚀击破电位提高,钝化区宽度扩大,钝化膜溶解电阻增大。此结果表明压力作用使316L不锈钢的耐腐蚀性能提高。对316L不锈钢在不同静水压力p作用时的电化学阻抗谱[11]进行测试,拟合得到0.1MPa(1atm)和9.06MPa压力下316L不锈钢的电荷转移电阻Rct和钝化膜电阻Rf见表1。分析表1中的数据,在压力由0.1MPa增加到9.06MPa时,电荷在相界面转移过程的电阻值略有减小,而钝化膜的电阻值增大了一个数量级。
深海环境中的静水压力升高时,316L不锈钢的耐腐蚀性能较常压下有所提高。结合表1中的数据,316L不锈钢属于奥氏体不锈钢,材料组织及成分的不同必定会对腐蚀的电化学反应过程产生影响,这种影响使得高压下钝化膜性能提高,从而使得316L不锈钢的耐腐蚀性能提高。

表1 不同压力下的电荷转移电阻和钝化膜电阻[12]
因此,中短期时间内316L不锈钢在深海中的并不会出现严重的腐蚀现象,步进机的转轴仍然可以控制释放机构执行脱钩操作。
而转子、定子所用的软磁材料硅钢片以及两端转子中间的永磁体钕铁硼,极容易在深海环境发生腐蚀,必须对进行防腐处理。目前在实际应用中最有效的手段是镀层防护法,可在磁体表面镀上具有优异耐腐蚀性能且性价比良好的Zn-Ni合金镀层[13]。然而深海环境还有很多未知性,除了上文所讨论的深海压力对于金属材料腐蚀行为的影响、防腐涂料的选择等外,还有很多需要考虑的因素[14],在之后的实验中,将对这些因素进行更深入的研究。
2.4深海环境下步进电机的绝缘分析
虽然本文拟将步进电机无密封直接至于海水当中,但是对于电机漆包线、水密电缆与步进电机引出线的分线结等部件仍然要做好绝缘处理以防止出现漏电情况。对于漆包线,可在其表面涂抹绝缘性能好的绝缘漆;对于分线结,可用3MScotchcast2131硫化胶进行处理。若步进电机在深海中出现漏电,可分为两种情况:步进电机绕组漆包线表面破损导致漏电,或步进电机引出线与水密电缆分线结处破损导致漏电。
首先讨论步进电机漆包线破损导致漏电的情况。图3图4分别为二相四线步进电机内部线路结构图和绕组电流回路图。在步进电机的实际驱动电路——步进驱动器中,K1—K4 4只开关为MOSFET管,当给步进驱动器输入脉冲信号后,脉冲信号使得4只开关两两循环关断(任意时刻总是两只开关闭合),首先开关K2和K3闭合,绕级电流从A+流向A-;接着开关K2和K4闭合,绕级电流从B+流向B-;紧接着开关K1和K3闭合,绕级电流从A-流向A+;然后开关K2和K3闭合,绕级电流从B-流向B+;以此循环,使得步进电机连续运转。

图3 二相四线步进电机内部线路结构
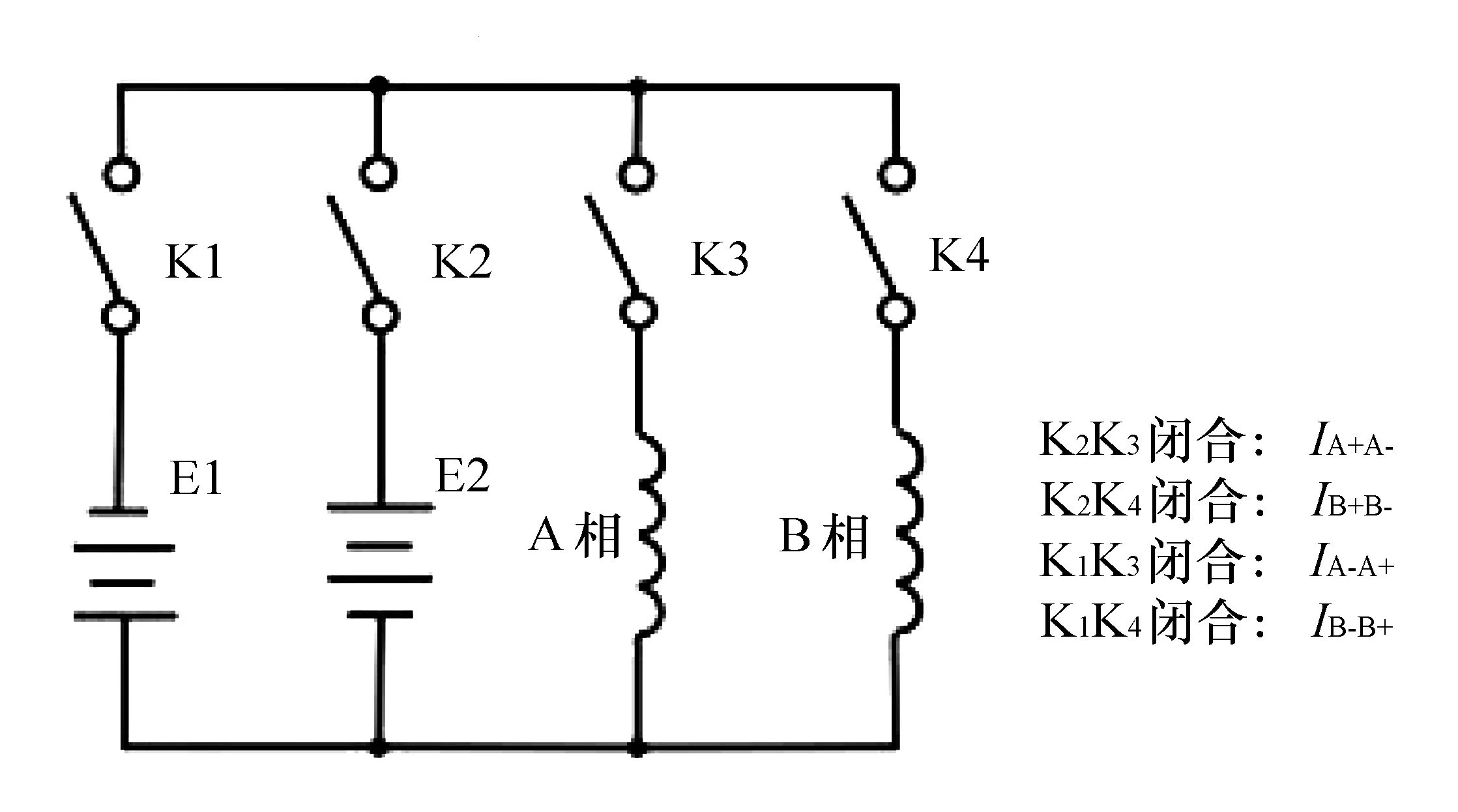
图4 二相四线步进电机绕组电路回路图
当二相混合式步进电机某一相漆包线破损时,由于海水的高电导率,相当于在已有线圈上并联了一个阻值不大的电阻(阻值大约为2Ω),且并联的节点与漆包线破损位置有关,如图5所示。由于所并联导线的电阻(大约为0.02Ω)远小于海水的电阻,所以电机通电以后,大部分电流仍然是从漆包线中流过。而本课题所使用的步进电机在海底正常情况下都是不通电的,只在甲板上发出了释放指令之后,电机才开始通电运转,使得重物释放。目前拟将电机运转时间控制在10s之内,即使在通电过程中漆包线部分与海水发生电解反应,这个过程也是很短暂的。因此即使漆包线出现小部分破损,在理论上并不会影响步进电机正常工作。

图5 步进电机漆包线破损
当步进电机引出线与水密电缆接头处破损导致漏电时,相当于在接头处并联了一个电阻,如图6所示。其通电情况与漆包线破损类似,在总体上也不会影响步进电动机正常工作。

图6 步进电机引出线与水密电缆接头处破损
同时,经过盐水槽实验,无密封电机在水中浸泡1个月之后仍可正常工作。也就是说,只要步进电机引出线与分线结处没有发生断路,电路就可以驱动电机正常工作。
等到设备出水之后,如果发生了漆包线破损或是接头处破损,只需更换步进电动机或者更换步进电机引出线与水密电缆的分线结。相比购买国外声学释放器,更换步进电机或者分线结的成本是非常低的。
3 结论
基于无密封步进电机的声学释放器在很大程度上解决了传统声学释放器存在的体积大、重量大、成本高等问题,并且有效地避开了电机旋转式声学释放器动密封困难的问题。选用步进电机作为声学释放器的控制电机,能够准确地定位和调速,满足了声学释放器机械释放机构对电机精度的要求。
深海条件下无密封步进电机面临了腐蚀、漏电、高压等问题。面对海水的高腐蚀性,可以通过选取316L奥氏体不锈钢制备步进电机的外壳及出力轴等,对于转子及定子所用的磁性材料,可在其表面镀上Zn-Ni合金镀层来进行防腐;当步进电机漆包线或者引出线与水密电缆分线结处破损导致漏电时,仅相当于在导线上并联了一个电阻,由于电机工作时间极短,因此理论上并不会影响电机工作;在深海高压环境中,只需保证步进电机的零部件材料内部没有气泡,就不会出现承压困难的问题。因此,在深海条件下,基于无密封电动机的声学释放器在中短期时间内可正常工作。
References)
[1] 张佳.声学释放器关键功能单元设计与实现[D].哈尔滨:哈尔滨工程大学,2009.
[2] 陈雄洲,聂晓敏,陈霞,等.深海释放器的技术发展展望[C]//2008海洋前沿技术论坛论文集,2008.
[3] 陈雄洲,聂晓敏,陈霞.深海声学释放器的研究与分析[C]//2009年度救捞论文集,2009.
[4] 邹波.深海电机旋转轴密封性能的研究[D].成都:西南交通大学,2008.
[5] 刘爱华.传感器在超声速测量中的应用[J].实验技术与管理,2005,22(9):32-33.
[6] 范超毅,范巍.步进电机的选型与计算[J].机床与液压,2008,36(5):310-313.
[7] 陈建辉.二相混合式步进电动机系统模型研究[D].广州:广东工业大学,2008.
[8] 马久明.金属材料在海水中腐蚀因素分析及预防措施[J].科研探索与知识创新,2010(8):106.
[9] 周建龙,李晓刚,程学群,等.深海环境下金属及合金材料腐蚀研究进展[J].腐蚀科学与防护技术.2010,22(1):47-51.
[10] 杨永刚,潘东阳.海工辅助船低闪点液舱不锈钢钝化工艺探讨[J].现代涂装,2015,18(7):46-49.
[11] 欧瑞姆,特瑞博勒特.电化学阻抗谱[M].雍兴跃,张学元,译.北京:化学工业出版社,2014.
[12] 丛园.缝隙和静水压力环境对316L不锈钢腐蚀行为的影响[D]. 哈尔滨:哈尔滨工程大学,2010.
[13] 董军军,侯志坚,白武帅,等.用于煤自燃监测的无源温度报警器开发[J].实验技术与管理,2015,32(9):76-78.
[14] 刘莉,崔宇,李瑛,等.深海静水压力环境下有机涂层失效行为研究[C]//第六届全国腐蚀大会论文集,2011.
Researchonfeasibilityofno-sealingelectromotorusedindeepseaacousticreleasetransponder
XuXing,WangMeng,PiaoRenjun,ZhangJing,ZhangHangyue
(SchoolofGeophysicsandInformationTechnology,ChinaUniversityofGeosciences,Beijing100083,China)
Thisarticleanalyzestheweaknessesofthetraditionaldeepseaacousticreleasetransponder,suchasgreatbulk,largeweightsandhighcostandtheproblemsofmotivesealingexistedinmotorrotaryacousticreleasetransponder,andalsoputsforwardawholeschemedesignofthedeepseaacousticreleasetransponderbasedonno-sealingelectromotor,whichistoputthecontrollingelectromotoroutsidethepressuredsealedcabintoavoidtheproblemofmotivesealing.Anditcandecreasethesizeandweightoftheacousticreleasetransponder,andthenlowerthecost.What’smore,itdecidedtousethetwophasehybridsteppingmotorasthecontrollingelectromotoroftheacousticreleasetransponder,anddiscussedhowtobearpressure,insulateandavoidcorruptwhenno-sealingelectromotorisworkingindeepseaconsideringthestructure,textureandoperatingprincipleofthesteppingmotor.Throughtheoryanalysisandsalinitybathexperimentresults,theacousticreleasetransponderwithno-sealingelectromotorworkingindeepseawithinmediumandshorttermisfeasible.
no-sealingelectromotor;deepseacondition;acousticreleasetransponder;corrosionresistance;insulation;overpressureresistance
DOI:10.16791/j.cnki.sjg.2016.07.026
2016-01-03
北京市2015年大学生创新创业项目B类(2015BXZ023);国家863计划项目课题(2012AA09A201);国家自然科学基金项目(41504138);中国地质调查局项目(201100307)
徐行(1997—),女,安徽安庆,本科生,测控技术与仪器专业
E-mail:cugbxuxing@163.com
王猛(1984—),男,河南许昌,博士,讲师,主要从事测控技术与仪器教学和地球物理仪器研制工作.
E-mail:wangmeng@cugb.edu.cn
P733.2-33
A
1002-4956(2016)7-0109-05
猜你喜欢
载人航天(2022年6期)2023-01-05 05:28:38
电线电缆(2021年3期)2021-07-21 08:37:14
家庭影院技术(2020年6期)2020-07-27 01:37:54
家庭影院技术(2019年1期)2019-01-21 02:25:04
家庭影院技术(2018年11期)2019-01-21 02:20:50
家庭影院技术(2018年10期)2018-11-02 05:35:26
电线电缆(2018年1期)2018-03-16 02:19:08
电焊机(2016年6期)2016-03-06 08:15:37
河南科技(2014年8期)2014-02-27 14:07:51
探索地理(2013年8期)2013-10-12 02:38:32