消防灭火侦察机器人的研制与应用
2016-08-26 09:02张树生裴文良蔡海廷姚春清ZHANGShushengPEIWenliangSUNNingCAIHaitingYAOChunqing中信重工开诚智能装备有限公司唐山063020
制造业自动化 2016年6期
张树生,裴文良,孙 宁,蔡海廷,姚春清ZHANG Shu-sheng, PEI Wen-liang, SUN Ning, CAI Hai-ting, YAO Chun-qing(中信重工开诚智能装备有限公司,唐山 063020)
机器人技术
消防灭火侦察机器人的研制与应用
张树生,裴文良,孙宁,蔡海廷,姚春清
ZHANG Shu-sheng,PEI Wen-liang,SUN Ning,CAI Hai-ting,YAO Chun-qing
(中信重工开诚智能装备有限公司,唐山 063020)
针对火灾、爆炸等事故灭火救援中消防人员遇到的生命安全问题,研制了一种实用的、可以代替消防人员进入火灾现场,进行灭火的消防灭火侦察机器人装置,介绍了消防灭火侦察机器人的组成和功能,论述了机器人减震系统和双层水幕自喷淋降温装置的设计方法和工作原理。最后介绍了控制系统的软件设计思想。实际应用表明,该机器人功能全面、性能稳定、实用性强,在消防灭火中可发挥重要作用。
消防;机器人;减震;控制系统
0 引言
随着社会经济的迅猛发展以及大型石油化工企业、隧道、地铁等建设的不断增多,化学危险品泄漏以及燃烧、爆炸等事故隐患增加,事故概率提高。一旦发生灾害事故,消防员面对高温、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡,不能达到预期目的,天津滨海新区物流仓库爆炸事故就是血的教训事件。解决这一问题的有效办法就是应用消防机器人,消防机器人搭载消防水炮等灭火设备以及摄像机、传感器等,代替消防人员进入危险灾害事故现场进行探测、搜救和灭火,能有效地解决消防人员面临的人身安全问题,而且现场指挥人员也可以根据其反馈结果,及时对灾情做出判断,加快事故现场救援工作[1,2]。本文从实用性角度出发,研制了一款消防灭火侦察机器人,应用效果良好。
1 消防灭火侦察机器人系统组成
消防机器人采用履带式机器人平台,由机器人本体、消防水炮、监控云台及操控终端四部分构成,硬件组成框图如图1所示。

图1 消防机器人硬件系统组成
机器人本体是机器人的核心组成部分,机器人行走机构主要有:轮式、腿式、轮腿式和履带式等,由于火灾现场地面情况复杂而且在喷水作业时机器人受到的后坐力较大,为了获得较好的效果,选择履带式行走结构。履带采用阻燃橡胶,内部采用多层帘布和钢骨架结构,使履带具有较高的强度和韧度。为保证机身行走平稳,研制了新型的弹簧悬挂减震系统,设计中采用了低重心稳定布局设计。由于对机器人的负载能力要求较高,设计中使用了大功率驱动装置,以增加拖拽消防水带的动力。消防灭火侦察机器人整体效果示意图如图2所示。

图2 消防机器人装置整体结构示意图
该机器人装置配有监控云台,可实时将现场图像信息传递到操控终端,以便消防人员全面了解火灾事故现场的详细情况,为事故救援提供可靠信息,加快灭火进度,减少损失。
监控云台采用模块化设计,可便捷地从机器人本体取下;云台俯仰角度:-90°/+90°,回转角度:360°,摄像机采用:1/3英寸Sony CCD,0.01Lux低照度,36倍光学变焦。
消防水炮是灭火的核心设备,可根据需要选用不同类型的消防水炮,本机器人携带水炮的炮体采用304不锈钢,可实现柱状水和散射水的喷水形状的切换,最大流量:80L/s;最大射程:80m。
操控终端如图2(b)所示,由数据处理器、无线终端、显示器和控制面板组成。数据处理器为控制终端的核心,负责接收机器人发回的图像视频和现场声音、温度等数据信息。操控人员通过控制面板向机器人本体发出指令,可直接控制机器人的行走、信息采集以及消防水炮的操作[3]。该机器人可实现前后移动和回转、消防水炮俯仰和回转、水炮头伸缩、监控云台俯仰和回转等7个自由度的操作,操控终端通过无线信号控制完成整个机器人系统的各个功能。
消防灭火侦察机器人控制系统框图如图3所示。

图3 消防灭火侦察机器人控制系统框图
2 消防机器人减震机构设计
消防机器人面对的环境一般较为复杂,除应满足爬坡角度、行走速度、越障高度、越壕宽度和涉水深度等一系列越障性能求外,还应具有较好的稳定性能,本设计选择了履带式结构形式,并设计了新型的三段式独立悬挂减震系统,如图4所示。

图4 独立悬挂减震系统示意图
该减震系统设计成三段式(前段、中间段、后段)独立弹簧悬挂减震系统,由驱动轮、导向轮、承重轮、支重轮、减震弹簧、减速机输出轴、刚性连接架等组成。该减震系统采用驱动轮后置,支撑板可绕着减速机输出轴回转,减速机输出轴与驱动轮之间链传动;左上角设置上导向轮,确保履带轮廓超过机器人箱体,在前行过程中履带先接触障碍物保护箱体不受撞击,上导向轮和下导向轮通过一个刚性连接架保持相对位置,该刚性支架与箱体固定点处铰接,中间结点与固定在箱体上的悬架用减震弹簧连接,在前行遭遇障碍物的情况下,刚性连接架带动两个导向轮绕着箱体固定铰接点回转压缩弹簧,起到减震作用;与履带接触位置布置四个承重轮,承重轮支架形成X型,中间用减震弹簧连接,承重轮成对布置在X架两端,单侧两个承重轮可绕X架端部铰接点绕动,前后上下受到冲击可缓冲;驱动轮与下导向轮行走时不与地面接触,下导向轮与支重轮之间设置有接近角,驱动轮与支重轮之间设置有分离角。因此,既可保证支重轮部分履带与地面的充分接触,又可降低履带与地面的滚动摩擦系数,使行走顺畅。
3 双层水幕自喷淋降温装置设计
消防灭火机器人进入火灾现场实施灭火时,由于火灾现场环境温度很高,给消防灭火机器人的工作带来不利影响,甚至造成电子器件无法工作。为解决消防灭火机器人遇到的高温问题,自主研发了一种消防灭火机器人双层水幕自喷淋降温装置。
该装置由顶盖部分、主轴部分、中间导流部分和底座部分组成,双层水幕自喷淋降温装置通过一个电磁阀安装于消防机器人水炮主管路上,当消防机器人自身温度升高时,遥控开启电磁阀进行自喷淋降温。
主轴部分采用三片式稳流装置固定在主体上,既可以稳定主轴,又起到防止水流旋转的作用,从而达到降低系统压力损失的作用。其中一级水幕为固定角度喷洒,二级水幕为雾化旋转齿轮喷洒,且喷洒角度可调。压力水源由进水口进入双层水幕自喷淋降温装置,首先经过一级水幕喷水出口,此口为常开固定不可调式,通过环装斜角出水口来实现水幕功能。压力水源到达二级水幕喷水出口时,由于水的流速会撞击旋转齿,此时旋转齿围绕轴心旋转,达到进一步细化水颗粒的作用。如需调节二级喷雾的角度,只需旋转流量调节手轮,由于内部导轨的作用,调节喷嘴会向上提起,减小了调节喷嘴和旋转齿之间的距离,从而实现喷雾角度的变化。本装置安装方式为快插可拆卸式,拆卸时只需按下喷洒头拆卸圈,取出双层水幕自喷淋降温装置,弹簧会自动复位拆卸装置。
4 消防灭火侦察机器人软件设计
消防机器人系统软件开发的硬件环境:基于TI 的AM3352(Cortex-A8)处理器。软件环境:采用WEC2013操作系统及Visual Studio 2013程序集成开发环境,编程语言采用C/C++。
按照系统功能,消防机器人系统软件根据功能可将程序划分为四部分,分别为:机器人移动控制、监控云台控制、消防水炮控制和图像及信息采集部分。主程序流程图如图5所示。
消防机器人软件主要完成以下控制功能:机器人运动的姿态和速度的远程控制;控制监控云台摄像头的仰俯、旋转角度和速度;消防水炮的俯仰、旋转、喷射方式的远程控制;采集、接收火灾现场的视频图像、温度等信息并在显示器上显示;人机界面的交互功能,接收/发送指令[4]。
5 结束语
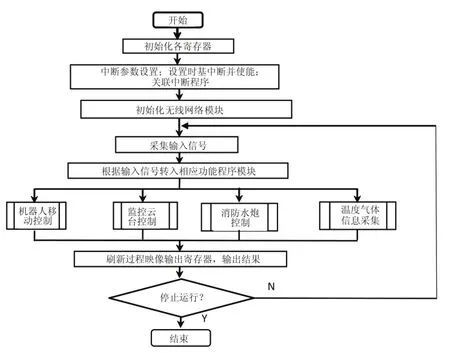
图5 主程序流程图
本装置已在多家消防大队应用,在实际灭火、灭火抢险及救援演练中发挥了重要作用,实际应用表明该机器人功能强、工作可靠、性能稳定,对火灾现场状况以及周围环境信息采集及时、准确,采集视频图像清晰;机器人行走敏捷,操控方便,喷水射程高、方式可调,工作时间长。不但降低了消防人员灭火的危险,而且对灾害现场情况掌握准确,便于及时发现问题,采取有效措施,提高了消防救援的工作效率。同时,该机器人装置具有遥控距离远、越障能力强、充电方便,操作简单、便于维护的特点。能较好的完成消防灭火任务,保证了消防人员的人身安全,提高了灭火效率,同时也提高了消防技术水平,带来了显著的经济社会效益。
[1] 李红伟,黄春茹.消防机器人的发展及应用研究[J].科技资讯,2012,02:21-22.
[2] 宁再望.消防机器人在灭火救援中德设计分析[J].数字技术与应用,2012,05:135-135.
[3] 徐正飞,杨汝清,许春权.消防机器人控制系统设计[J].机械设计,2002,02:29-31.
[4] 刘红星.消防侦察机器人的设计研究[D].上海交通大学,2006.
Development and application of fire fighting reconnaissance robot
TP242
A
1009-0134(2016)06-0055-03
2016-03-22
张树生(1973 -),男,河北唐山人,高级工程师,本科,研究方向为特种机器人技术及其研发制造。
猜你喜欢
娃娃乐园·综合智能(2021年10期)2021-12-06
小天使·聪聪画刊(2021年3期)2021-09-10
南京工业大学学报(自然科学版)(2021年2期)2021-04-14
环球时报(2020-10-22)2020-10-22
当代陕西(2019年15期)2019-09-02
火力与指挥控制(2019年3期)2019-04-23
中国军转民(2017年6期)2018-01-31
中国科技纵横(2017年14期)2017-08-17
广东造船(2017年3期)2017-07-18
中国高新技术企业(2017年4期)2017-05-06