
视觉传感系统的自主移动机器人路径规划方法*
2016-08-25 02:32曹江涛
传感器与微系统 2016年8期
赵 婧, 曹江涛
(辽宁石油化工大学 信息与控制工程学院,辽宁 抚顺 113001)
视觉传感系统的自主移动机器人路径规划方法*
赵婧, 曹江涛
(辽宁石油化工大学 信息与控制工程学院,辽宁 抚顺 113001)
在未知环境下,机器人很难快速获取周边环境信息并建立实时环境地图,实现自主运行。为此提出基于视觉导航的方法,利用全景摄像机作为机器人的视觉传感器系统采集环境信息,将彩色地图进行HSI空间下模糊聚类图像分割,得到环境二值图像;将图像进行栅格化处理来构建环境地图,运用8方向连接的Dijkstra进行全局路径规划,计算出最优路径,从而实现移动机器人的快速、自主运动。经过仿真实验证明,该方法有效且可行。
机器人; 视觉导航; 视觉传感器; 模糊聚类; 环境地图; 路径规划
0 引 言
对移动机器人路径规划的研究一直是国内外学者的研究热点[1~3]。Kleinert M,Schleith S[4],在室内GPS导航失效的情况下,提出采用视觉同时定位与地图构建,即Visual SLAM技术辅助惯性导航的方法,实时建立了环境的增量式地图,有效抑制了导航系统的误差积累。但是此方法只利用机器人内部数据和局部视觉信息实现导航,因而难以获取环境的全局信息。Chen C L等人[5]提出了一种基于相机的视觉伺服控制系统运动模型来控制未知环境下的移动机器人导航。这种方法可以实现机器人的视觉导航,但是是采用安装于机器人上的视觉系统使得机器人对周边环境信息的获取具有一定的局限性,降低了整个系统的实用性。
在未知的动态环境中,周边的环境信息随时可能发生变化。因此,动态环境中全局信息的实时获取是至关重要的。本文设计了基于视觉导航自主移动机器人的路径规划方法,利用环境中布置的全景摄像头作为机器人的视觉传感器系统进行环境信息的采集与分析,区别于安装在机器人上的相机,可以得到整个环境的实时信息。同时避免了声呐传感器、红外传感器等易受外界环境干扰的弊端;并且,当室内的环境信息发生变化时,可以及时更新环境信息。对该信息进行图像处理,创建环境地图,这为机器人后面进行快速、准确的路径规划提供了可能。
1 总体方案设计
本文提出的方法主要可分为四个步骤:环境信息的图像采集[6]、图像处理(RCB转换到HIS,模糊C聚类分割)、构建环境栅格地图和全局路径规划。
2 基于HSI空间的模糊聚类的彩色图像处理技术
2.1机器人视觉导航技术
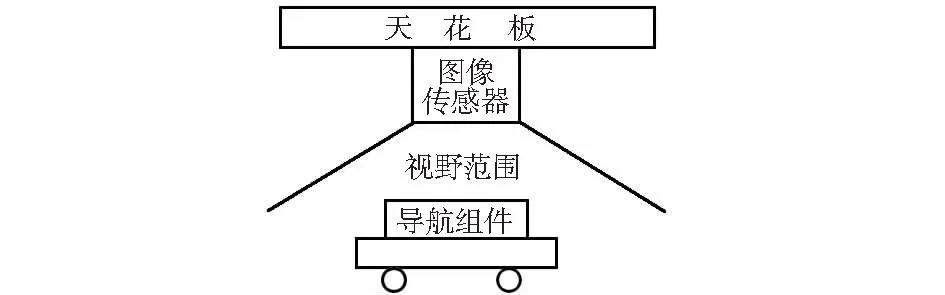
图1 图像采集方案Fig 1 Image acquisition scheme
2.2颜色模型与转换
从人的视觉感知和特性的角度出发,颜色空间所对应的RGB空间不具有一致性,并且不太直观。而HSI颜色模型是一种更加接近于人眼对色彩感知的颜色模型,因此,为了更好地对彩色图像处理和识别,本文采用基于HSI空间的模糊聚类彩色图形分割算法进行图像处理。其中,H代表色调,S代表饱和度,而I则代表亮度,用这三个分量来对色彩进行描述[7~10]。
RGB 颜色模型和 HSI 颜色模型有如下关系[11]
(1)
根据RGB颜色模型和HSI颜色模型的转换公式,将彩色地图图像由RGB转换到HSI空间模型下。其中,HSI颜色模型下的各分量图如图2所示。
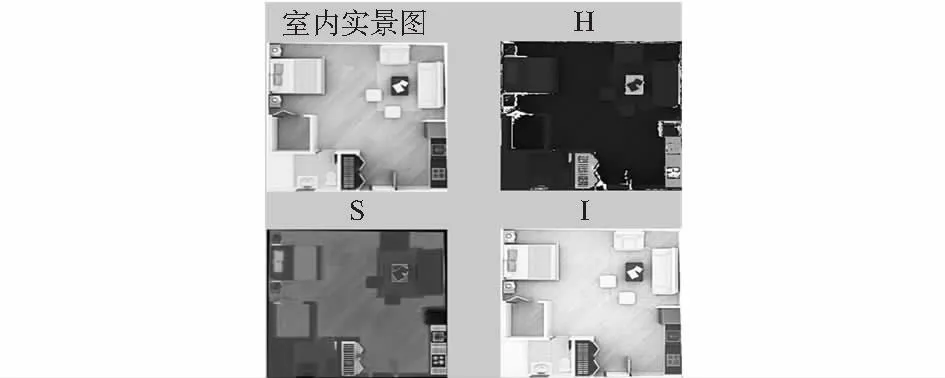
图2 HSI 颜色模型下各分量图Fig 2 Diagram of each component in HSI color model
2.3模糊C聚类[12]
(2)
Ej(xk)=‖xk-yj‖2
(3)
式中U={ujk},m>1为常数,其约束为
(4)
(5)
(6)
(7)
基本思路为:将所有的像素点集分为c类,任意样本对某类的隶属度为ujk,通过最小化关于隶属度矩阵和聚类中心的目标函数来实现像素点的分类,即不同区域的分类。
对于油田企业来说,档案信息化数据运行管理中,如何确保档案资料的安全性与保密性,是现阶段需要考虑的重点问题。近年来,电子档案逐渐成为主流,随之而来的电子档案丢失、泄露等问题也频频出现。而油田档案直接关系到油田企业的商业机密,更需要做好安全保管。除了利用计算机自带的防火墙进行电子档案保护外,还要综合采取其他安全措施,例如要求档案管理人员养成良好作业习惯,禁止利用办公计算机下载文件,或是将个人U盘、移动设备连入企业计算机等。此外,定期对系统进行杀毒、升级杀毒软件,通过综合采取措施,确保电子档案的安全。
2.4算法流程
1)颜色粗糙度的计算
颜色粗糙度Sm[13]是用来衡量彩色图像颜色变化的剧烈程度的,而图像中的平均颜色粗糙度Savg则可以作为这幅图像颜色的量化参照。设图图像空间分两只为Xi,矩阵为M×N,则定义如下所示
(8)
(9)
式中xmean表示该彩色图像的颜色均值,Savg为这幅图像颜色变化剧烈程度的量化参照。而Xj在[0,1]之间,则可以推算出,用Savg设定彩色图像的分割区域数量,即进行聚类的数目。
2)基于HSI空间的模糊聚类彩色图形分割算法流程:
a.将原始彩色图像按式(7)转换为HSI空间下。
b.按照以下规则进行图像区域模糊聚类:
利用模糊成员函数产生M个聚类中心;在HSI空间的I值域上,在这些聚类中心运用C—均值法进行聚类;对每个区域进行优化计算,算法准则为:设r为忽略系数,经多次仿真得出,一般为图像分辨率M×N中min(M,N)的0.01~0.05倍,r越小,划分结果越细致,令,K=r·min(M,N),规定对于分割后的子区域,若小于K×K面积,则将它合并到相邻区域;合并后将原彩色图像进行分割,划分出不同区域条,完成分割。具体流程图如图3所示。

图3 算法流程图Fig 3 Algorithm flow chart
得到的彩色图像分割图如图4所示。

图4 彩色图像分割图Fig 4 Color image segmentation
3 机器人环境地图建模
由于本设计采用位于屋顶的全景摄像头,可以获取室内物体的全方位环境信息,环境中的物体对于摄像机的远近的影响可以忽略,因此,采用建立二维地图的方法,可以减少计算量。建立移动机器人二维工作空间的环境地图模型是移动机器路径规划的重要任务,由于栅格法的地图创建和维护比较容易,并且各个栅格的信息直接与环境中某区域信息相对应,因此,本文选取栅格法进行室内环境建模。 经过图像分割处理后的机器人视觉地图是像素为0,1的矩阵。其中,0为黑色障碍物区域;1为白色可行区域。将图像分割地图栅格化后的室内环境地图模型如图5所示。

图5 栅格地图Fig 5 Grid map
4 机器人的路径规划
本文采用单元分解路径规划的基本思路,用规则的栅格法表示机器人工作环境,然后运用搜索算法寻找最优路径,由于考虑了环境中不确定的环境因素,本文采用8方向连接的全局优化D*[14]算法对栅格地图进行路径规划。D*算法应用了贪心算法模式,采用标号方法进行最短路径搜索,是目前公认最好的求解最短路径方法。它的基本思想是:按路径长度递增依次产生最短路径。其步骤如下:
1)首先搜索与源节点相关联的节点,然后初始化节点列表中所有节点的权值,同时创建有效节点的关联表。
2)选取最短距离节点操作:选择节点Node[j],使得cost[j]=min{cost[i],cost[i]∈Nodelist}。其中,Node[j]为当前求得的从源节点出发的最短路径终节点。
3)优化操作:对从Node[j]出发到节点Node[k]进行优化,即若,则修改为。
4)重复步骤(2)和步骤(3),直至Node[j] =finalv,finalv为目标节点。
5)结束。
仿真结果如图6所示。
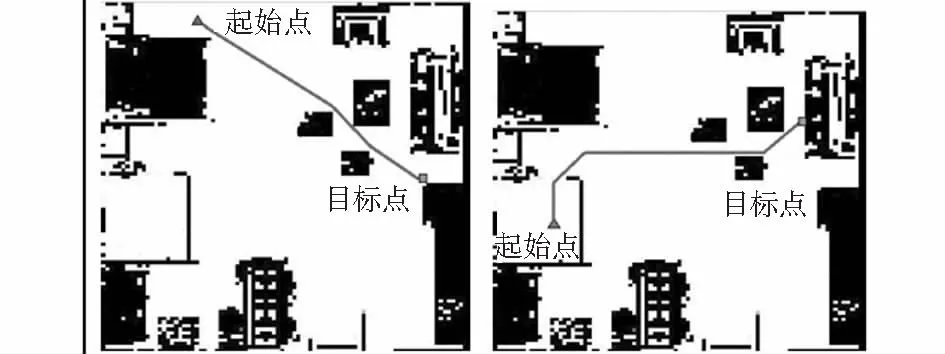
图6 路径规划仿真图Fig 6 Path planning simulation diagram
在图6中,三角形代表起始点,正方形代表目标点,连线代表最短路径连线。

表1 路径规划数据结果
从仿真结果可以看出:在经过图像处理的地图中,任意设定机器人的起始点与终止点,该算法都能成功的进行全局路径规划,找到最优路径。
5 结 论
本文利用全景摄像机采集环境信息,采用基于HSI空间的模糊聚类彩色图形分割算法进行图像处理,得到环境二值图像,进而构建环境地图,进行全局路径规划的方法,实现了移动机器人的自主运动。
该方法可以实时地构建复杂的全局地图,快速进行路径规划,避开障碍物并找出最短路径;算法简单,且具有较强的实时性。仿真结果表明:通过该方法规划出的运行路线,在复杂的障碍物环境中,拥有较好的路径规划性能。
[1]郭文亮.基于全局视觉的移动机器人导航系统研究[D].北京:北京交通大学,2011.
[2]Zhang Q,Jia Q,Sun H,et al.Single image-based path planning for a spherical robot[C]∥The 5th IEEE Conference on Industrial Electronics and Applications(ICIEA),IEEE,2010:1879-1884.
[3]毛利民,卢振利,朱培逸,等.智能校园巡检机器人设计与控制[J].测控技术,2015,34(1):84-90.
[4]KleinertM,SchleithS.InertialaidedmonocularSLAMforGPS-deniednavigation[C]∥IEEEConferenceonMultisensorFusionandIntegrationforIntelligentSystems,2010:20-25.
[5]ChenCL,LeeMR.Globalpathplanninginmobilerobotusingomnidirectionalcamera[C]∥2011InternationalConferenceonConsumerElectronics,CommunicationsandNetworks(CECNet),IEEE,2011:4986-4989.
[6]许俊勇,王景川,陈卫东.基于全景视觉的移动机器人同步定位与地图创建研究[J].机器人,2008,30(4):289-297.
[7]张国权,李战明,李向伟,等.HSV空间中彩色图像分割研究[J].计算机工程与应用,2010,46(26):179-181.
[8]魏武,龚树锋.基于机器视觉的非结构化道路检测算法研究[J].传感器与微系统,2010,29(1):39-41.
[9]王艳庆,程伟德,张华,等.激光视觉传感器对不连续焊缝的识别[J].传感器与微系统,2011,30(5):8-11.
[10] 丁广帅,雷运洪.基于机器视觉区域处理技术的水中机器人定位方法[J].兵工自动化,2010,29(11):74-78.
[11]RoyerE,LhuillierM,DhomeM,etal.Monocularvisionformobilerobotlocallizationandautonomousnavigation[J].InternationalJournalofComputerVision,2007,74(3):237-260.
[12]BezdekJC.Patternrecongnitionwithfuzzyobjectivefuoionalgorithms[M].NewYork:PlenumPress,1981.
[13] 叶齐祥,高文,王伟强,等.一种融合颜色和空间信息的彩色图像分割算法[J].软件学报,2004,15(4):5-22.
[14]StentzA.Optimalandefficientpathplanningforpartially-knownenvironments[C]∥ProceedingsoftheIEEEInternationalConfe-renceonRobotics&Automation,1994,:3310-3317.
Path planning method of autonomous mobile robot based on vision sensing system*
ZHAO Jing, CAO Jiang-tao
(School of Information and Control Engineering,Liaoning Shihua University,Fushun 113001,China)
It is very difficult for robot to quickly obtain surrounding environment information and establish real-time environment map to achieve autonomous operation in unknown environment.To solve the problem,present a method based on visual navigation,which uses panoramic camera as vision sensor system of robot to collect environmental information and use fuzzy clustering image segmentation to division color map in HSI space,and obtain binary image;grid processing on image is carried out,build environment map,and use 8 directions connected Dijkstra for global path planning and calculate the optimal path,so as to achieve fast and autonomous movement of mobile robot.The simulation experiments show that the method is effective and feasible.
robot; visual navigation; vision sensor; fuzzy clustering; environmental map; path planning
2015—11—04
国家自然科学基金资助项目(61203021);辽宁省自然科学基金资助项目(2013020024)
TP 391
A
1000—9787(2016)08—0044—03
赵婧(1989-),女,辽宁锦州人,硕士研究生,主要研究方向为智能机器人自主导航与控制。
DOI:10.13873/J.1000—9787(2016)08—0044—03
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
铁道通信信号(2019年6期)2019-10-08
电子制作(2019年16期)2019-09-27
制造技术与机床(2017年3期)2017-06-23
自动化学报(2017年5期)2017-05-14
雷达学报(2017年6期)2017-03-26
互联网天地(2016年1期)2016-05-04
智能系统学报(2015年4期)2015-12-27
东北电力大学学报(2015年1期)2015-11-13
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
