基于模糊PID主从式方法的多电机同步控制
2016-08-18 07:36周武能
网络安全与数据管理 2016年15期
潘 亮,周武能,张 杨
(东华大学 信息科学与技术学院,上海 201620)
基于模糊PID主从式方法的多电机同步控制
潘亮,周武能,张杨
(东华大学 信息科学与技术学院,上海 201620)
通过对多电机同步控制结构和控制策略的传统PID控制算法与模糊PID控制算法的分析,提出了模糊PID主从式同步控制方法,并通过MATLAB/Simulink进行建模仿真。仿真结果表明,与传统PID同步控制算法相比,采用模糊PID主从式同步控制方法具有更好的同步性能表现,并能够有效地改善系统的稳定性和动态性能,而且具有良好的鲁棒性。
多电机;同步控制;PID;模糊控制
0 引言
多电机系统广泛应用于工业、农业和交通运输业中,在工业生产中的地位也越来越重要。为了获得高质量的产品,减少轮廓误差,提高系统操作的安全性,通常,同步是多电机系统的最基本的要求[1-2]。在最近几十年里,很多种同步控制策略被应用在多电机控制系统中。参考文献[3]中运用混沌速度同步控制器,通过对两台电机的转速偏差进行补偿,有效地改善了系统同步性能。参考文献[4]中针对一个双线性电机伺服系统提出了交叉耦合的智能滑模控制;为了简化控制结构,ZHAO D Z等人研究了一种混合滑模控制的膜毗邻耦合的多电机同步控制[5],Xiao Yong等人针对多电机系统提出了一种通用的同步控制器,通过在最优控制结构中整合交叉耦合技术实现[6]。除此之外,很多其他的控制策略也被运用在多电机同步控制系统中,比如自适应控制、鲁棒控制、神经网络控制、变增益控制等。通常耦合的多电机系统中很少考虑驱动装置的动态模型,针对以上不足,本文提出了模糊PID主从式同步控制方法,该方法能够有效改善系统的稳定性和动态性能,并具有良好的鲁棒性。在实际应用中,多电机的同步性能会因各驱动特性的不匹配、负载的扰动等因素的影响而恶化,因此同步控制方法的好坏直接影响着系统的可靠性与稳定性。由于多电机系统应用越来越广泛,方式灵活,所以多电机同步控制系统的研究已经成为众多学者研究的热点。
1 多电机同步控制结构
鉴于多电机的重要性,近几十年以来,多电机系统吸引了大量学者广泛的研究兴趣,多种多电机同步控制策略被相继提出,比如自适应控制、鲁棒控制、神经网络控制、变增益控制、无模型控制等都取得了比较理想的控制效果。这些同步控制策略主要基于两种多电机同步控制结构——机械同步结构和电子同步结构,前者主要通过物理部件进行连接,像皮带、链条、齿轮等,成本比较高,其弊端是电机在工作过程中,一旦工作环境发生变化,就会导致机械总轴震动,而且实施起来也有一定的困难,因此,这种同步方式现在用得越来越少。
鉴于机械结构的一些弊端,学者们又提出了电子同步控制结构[7],这种控制结构成本比较低,实施起来也相对容易很多,因此在多电机系统中应用越来越广泛。电子同步控制结构又可细分为两种,第一种是主从控制方式,它的控制思想是:让从电机跟踪主电机运行,因此系统中只给定主电机输入信号,其输出信号送入从电机的输入中,当没有扰动因素影响时,该控制结构可以达到比较理想的控制效果。它的弊端是,主从电机之间没有反馈,因此整个控制系统相当于开环控制结构,主从电机中任何一个在工作过程中受到扰动因素的影响,都会出现较大的同步误差,甚至导致系统不稳定。
在实际生产过程中,当主电机在运行中受到扰动或发生故障时,都会影响到后面的从电机,针对这种情况人们提出并行同步控制思想。相对于主从控制方式,并行控制结构的优点在于,系统中所有的电机采用相同的输入参考速度,解决了主从控制存在的问题。
2 基于模糊PID的同步控制
传统PID由于结构和算法相对简单,且易于实现,在工业生产中有着广泛的应用,它的不足之处是一般需要知道被控对象的精确数学模型,而且算法的参数整定也比较困难,再加上不具备自适应能力,一旦工作环境发生变化,就需要对参数重新进行整定[8]。随着制造业的不断发展,人们对产品的各方面性能要求越来越高,控制系统也必将越来越复杂,现代的控制系统多存在非线性、强耦合、时变性等特性,传统的控制方法已难以满足控制的要求。为了解决这一难题,学者们提出了多种智能PID控制方法[9],比如专家PID、遗传算法PID、神经网络PID等。然而由于控制器的计算速度有限,这些算法很难用到实时的控制对象中。本文采用两输入(误差和误差的变化率)的模糊控制器,它能够根据控制系统的误差及误差的变化率自动调节PID的3个参数,因为它具有自动调节其参数的能力,所以相比其他控制器而言,具有更好的控制性能表现。
3 模糊PID主从式同步控制策略
传统的主从式电机同步控制方法由于两个电机之间没有转速的反馈,所以整个控制系统相当于开环结构,当主电机在运行过程中受到扰动时,其速度就会发生较大的变化,由于传统的PID控制方法,控制过程一旦确定就无法改变,因此,两个电机之间就会出现较大的同步误差,甚至导致控制系统的不稳定。本文在此基础上,提出了模糊PID主从式同步控制方法,从电机采用模糊PID控制器,以两个电机之间的转速差及差值变化率作为模糊控制器的两个输入,输出PID 3个参数的增量。由于模糊PID具有自适应性[10],因此它能在线调整PID控制器的3个参数,当主电机受到扰动或从电机自身受到扰动时,从电机仍然能够较好地跟随主电机的速度,整个控制系统的同步性能大大提高。模糊PID主从式同步控制结构如图1所示。
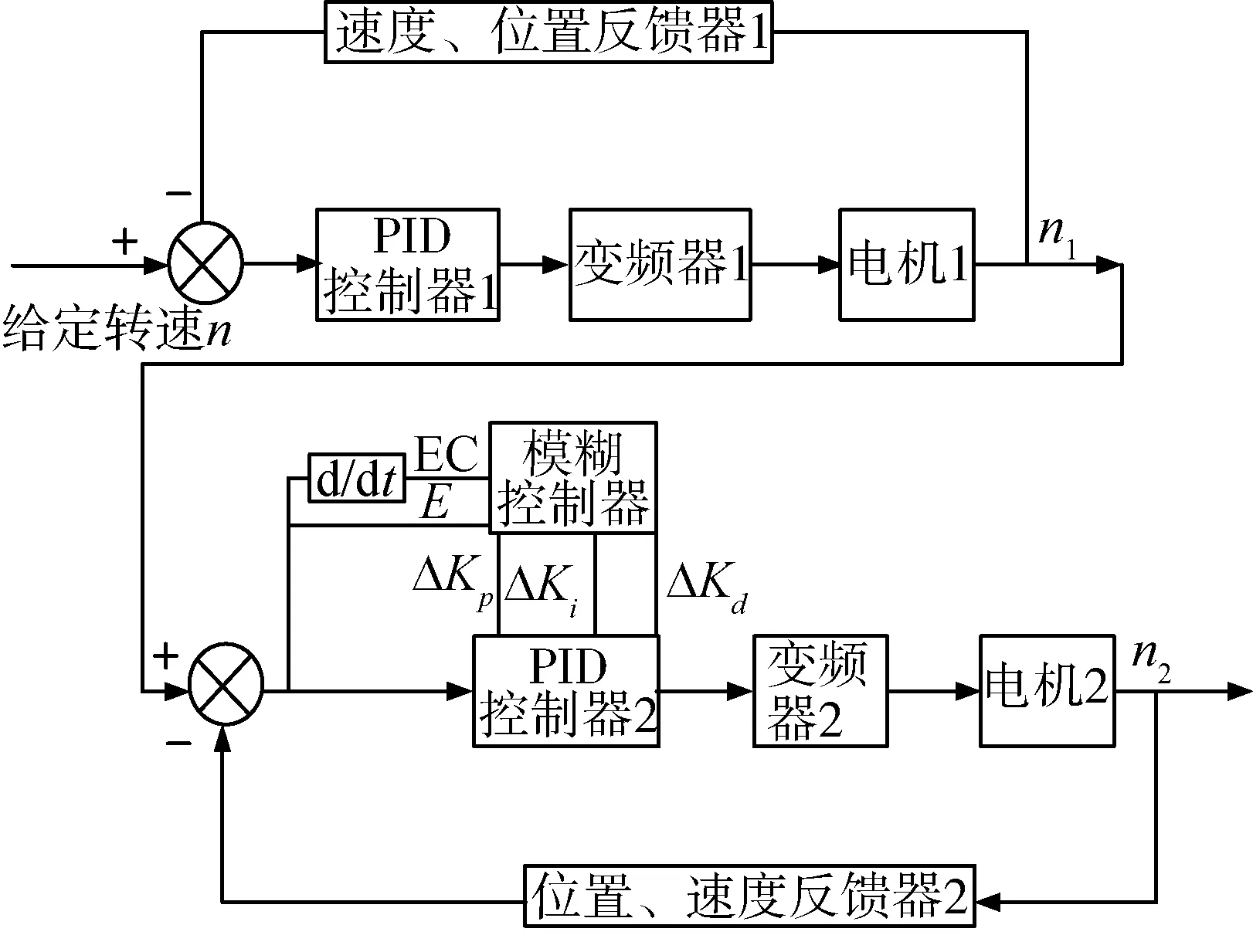
图1 模糊PID主从式同步控制结构图
首先确定PID控制器的3个参数与偏差E以及偏差变化EC之间的模糊关系,这个控制规则很重要,一般有如下经验[11]:(1)当|E|较大时,为使系统具有较好的跟踪性能,应取较大的Kp与较小的Ki,同时为避免系统响应出现较大的超调,应对积分作用加以限制,通常取Ki=0。(2)当|E|和|EC|处于中等大小时,为了使系统响应具有较小的超调,Kp应取得小些。在这种情况下,Kd的取值对系统响应的影响较大,Ki的取值要适当。(3)当|E|较小时,为使系统具有较好的稳定性能,Kp与Ki均应取得大些,同时为避免系统在设定值附近出现振荡,KD的取值相当重要,一般在|EC|较小时,Kd的取值应该较大些;|EC|较大时,Kd的取值应该较小些。然后在运行时实时检测E及EC的值,根据先前确定的模糊关系,利用模糊推理的方法,在线修改PID控制器的3个参数,使PID参数可自整定,以满足不同E和EC对控制参数的要求,从而使控制系统有良好的动态、稳态性能。
模糊控制器的核心部分是模糊规则,它是对工程人员的实际操作经验和技术知识的总结,因此,合适的模糊规则表的建立尤为重要。本文在建立模糊规则时,偏差、偏差的变化以及控制量的论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},模糊语言集可表示为{NB:负大,NM:负中,NS:负小,Z:零, PS:正小, PM:正中,PB:正大}。E和EC隶属函数如图2所示。
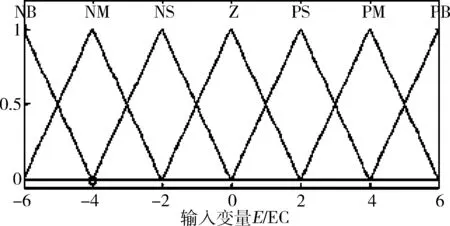
图2 隶属函数
根据控制规则、相关技术知识以及不断的试验结果,得到模糊控制规则表,如表1所示。
4 系统实验仿真
本文搭建了基于传统PID控制的主从式多电机同步控制方法和基于模糊PID的主从式多电机同步控制方法,并利用MATLAB/Simulink进行建模仿真,以表2所示的两台电机为例。选取等腰三角形作为隶属度函数分布,可得各模糊子集的隶属度赋值,再确定论域和语言值,然后根据各模糊子集隶属度表和参数模糊控制模型,运用模糊推理设计PID 参数的模糊矩阵,仿真结果如图3、图4所示。
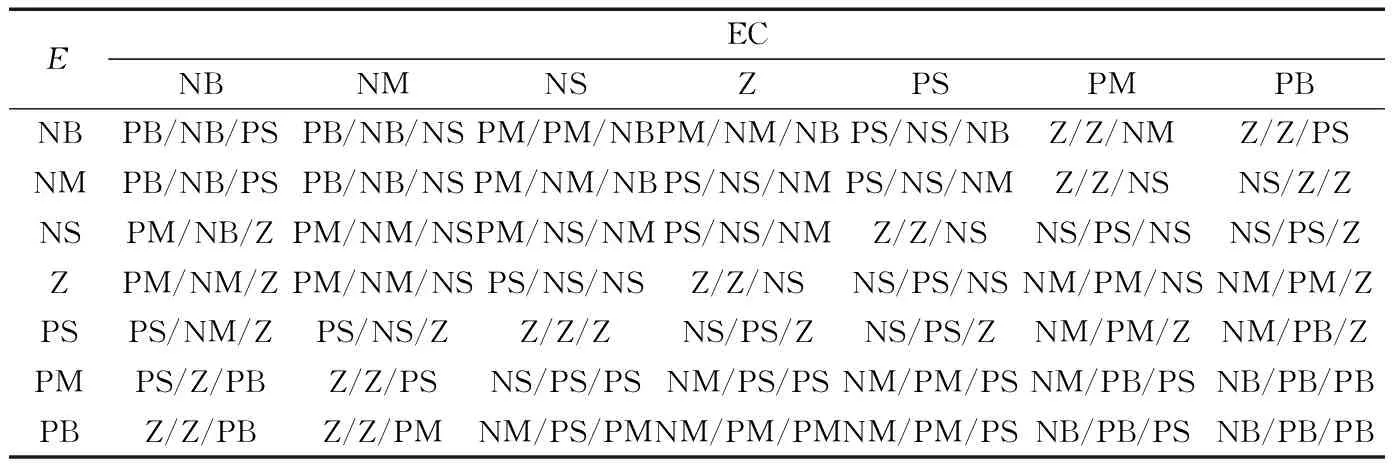
表1 ΔKp、ΔKi、ΔKd的控制规则
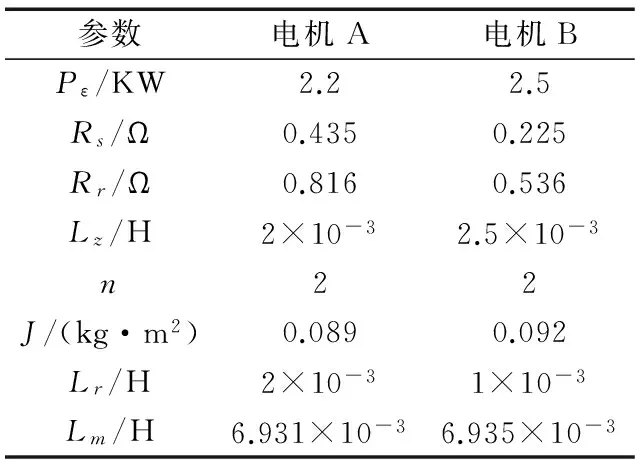
表2 两台三相交流异步电机参数
图3、图4分别为在传统PID和模糊PID控制下,双电机位置控制系统在斜坡信号作用下的A、B电机的位置跟踪误差曲线仿真图。
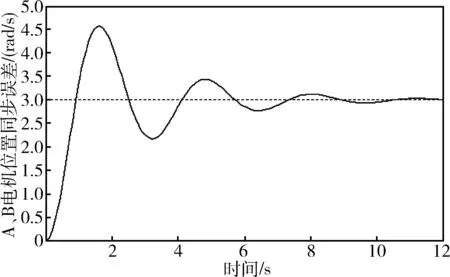
图3 PID 控制器双电机同步系统的位置跟踪仿真结果
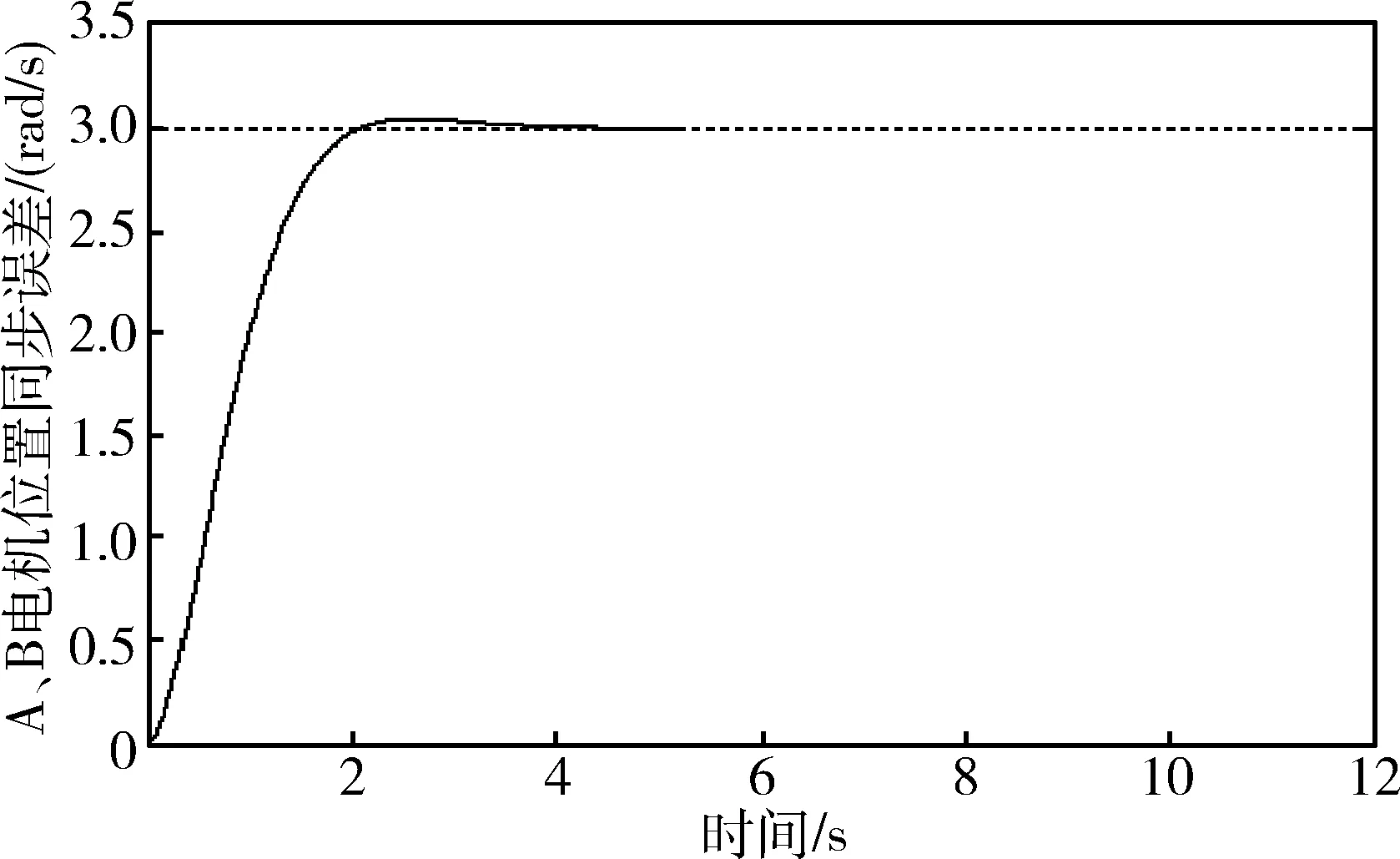
图4 模糊PID 控制器双电机同步系统的位置跟踪仿真结果
比较图3和图4可知,在模糊PID控制下的控制系统有较好的控制性能,与传统PID控制系统相比,其稳态误差更小,同时它的调整时间也远小于传统的PID控制。可见,在多电机同步控制系统中,采用基于模糊PID主从式同步控制策略,可以有效地改善系统的性能,使系统具有更好的稳定性和较小的调节时间。
5 结束语
本文通过对几种常见的多电机同步控制策略进行阐述及特点分析,在传统主从式多电机同步控制的基础上,提出了模糊PID主从式同步控制方法用于两台电机的同步控制,并以两台三相异步电机为例进行建模仿真。仿真结果表明,采用基于模糊PID主从式的多电机同步控制方法具有更小的同步误差和更好的稳定性,应用范围更加广泛。
[1] 吴其华,徐邦荃.多电机同步传动控制系统分析 [J].兵工自动化,2003,22(1):20-24.
[2] 姜晓平,朱奕,伞冶.大功率随动试验台多永磁同步电机同步控制[J]. 电机与控制学报,2014,18(4):89-95.
[3] ZHANG Z,CHAU K T,WANG Z. Chaotic speed synchronization control of multiple induction motors using stator flux regulation[J].IEEE Transaction on Magnetics, 2012,48 (11):4487-4490.
[4] LIN F J,CHOU P H,CHEN C S,et al.DSP-based cross-coupled synchronous control for dual linear motors via intelligent complementary sliding mode control[J]. IEEE Transaction on Industrial Electronics, 2012,59(2):1061-1073.
[5] ZHAO D Z, LI C W,REN J.Speed synchronization of multiple induction motors with adjacent cross-coupling control[J]. IET Control Theory and Application, 2010,4(1):119-128.
[6] Xiao Yong,Zhu Kuanyi,LIAW H C. Generalized synchronization control of multi-axis motion system[J].Control Engineering Practice, 2005,13(7):809-819.
[7] 王国亮.基于模糊PID补偿器的多电机同步控制策略研究[D].沈阳:东北大学,2006.
[8] 刘金琨. 先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2008.
[9] 常满波,胡鹏飞.基于MATLAB的模糊PID控制器的设计与仿真[J].机车电传动,2002(5):34-36.
[10] 张建民,王涛,王忠礼.智能控制原理及应用[M].北京:冶金工业出版社,2004.
[11] 诸静.模糊控制理论与系统原理[M].北京:机械工业出版社,2005.
The multi-motor synchronous control based on fuzzy PID master-slave method
Pan Liang,Zhou Wuneng, Zhang Yang
(College of Information Science & Technology, Donghua University, Shanghai 201620, China)
In this paper, through analyzing the traditional PID control algorithm and fuzzy PID control algorithm of the multi-motor synchronous control structure and control strategy, a method of fuzzy PID master-slave synchronous control is proposed. Furthermore, modeling and simulation is established by MATLAB/Simulink. Results show that compared with the traditional PID synchronous control algorithm, fuzzy PID master-slave synchronous control method is of better synchronization performance, and can effectively improve the stability and dynamic performance of the system, and has good robustness.
multi-motor; synchronous control; PID; fuzzy control
TP23
A
10.19358/j.issn.1674- 7720.2016.15.001
2016-04-03)
潘亮(1990-),男,硕士研究生,主要研究方向:智能控制、基于模糊PID的多电机同步控制。
周武能(1959-),男,博士,教授,博士生导师,主要研究方向:神经网络稳定性与同步、复杂网络稳定性与同步、传感器网络协同与控制、鲁棒控制、工业过程控制。
张杨(1992-),男,硕士研究生,主要研究方向:计算机网络融合与系统集成、半主动悬挂控制系统。
引用格式:潘亮,周武能,张杨. 基于模糊PID主从式方法的多电机同步控制[J].微型机与应用,2016,35(15):5-7.
猜你喜欢
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年2期)2017-05-04
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年24期)2016-04-12
电测与仪表(2016年20期)2016-04-11
探测与控制学报(2015年4期)2015-12-15
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31