
码头疏浚工程水下地形测量技术探讨
2016-08-17 11:28王春茶
长春工程学院学报(自然科学版) 2016年2期
王春茶
(福建船政交通职业学院道路工程系,福州350007)
码头疏浚工程水下地形测量技术探讨
王春茶
(福建船政交通职业学院道路工程系,福州350007)
以海南码头疏浚工程的水下地形测量为研究对象,介绍了GPS-RTK的使用及应该注意的问题,给出了本工程水下地形测量的作业流程,分析了影响水下地形测量精度的几种因素及相应对策,并通过本工程实际案例结果进行验证。
GPS-RTK;水下地形测量;中海达;实际案例
1 工程概述
海南国电西南部电厂配套码头疏浚工程,分二期建设。本次工程先建设一期机组以及配套的海域工程。
南防波堤长1 292.6m,为斜坡式结构。内、外坡坡度均为1︰1.5,堤头采用14t扭王字块体护面;堤身采用12t、6t扭王字块体护面。北防波堤总长1 429m,为斜坡堤结构。内、外坡坡度均为1︰1.5,堤头采用14t扭王字块体护面。防波堤典型断面图如图1所示。

图1 南防波堤典型结构断面图
本工程有港池、航道疏浚施工。根据设计资料,港池疏浚量约436万m3,疏浚底标高-14.40m。回旋水域直径456m,设计坡比1︰4。在施工之前需要先进行水下地形测量,利用GPS-RTK定位数据和测深仪测深数据,结合装有成图软件的便携式电脑, 实现数字化测图,为挖泥船施工提供依据[1]。疏浚施工平面布置图如图2所示。
2 GPS-RTK的使用
2.1 RTK的使用步骤
1)架设基站、组装移动站。
2)基准站设置。首先用手薄连接基准站接收机,(手薄开机,进入 Hi RTK道路版,选择“2.0GPS”图标,点击连接GPS,连接,搜索,选中我们要连接的设备S/N:号码→连接)连接好后GPS会有一声“咚”的提示音。这时会自动跳到GPS连接后的界面,这时所有按钮都变为蓝色,点击基准站设置,在跳出的界面里面的位置按钮里面点击平滑,等平滑10次以后点击确定,在跳出的设置成功对话框中点击“OK”,退出此界面,点击断开GPS接收机。

图2 疏浚施工平面布置示意图
3)连接移动站接受机。连接蓝牙同上,连接好后,进入移动站设置:点击数据链(数据链可以选择内置电台和内置网络,内置网路即手机卡模式);点击“其他”按钮设置差分模式:选中RTK,电文格式选中“SCMRX”,这时点击确定,收到差分信号后单点会变为固定。这样移动站设置成功。退出此界面。
4)新建项目。点击图标1项目按钮→新建→输入文件名称打勾→在左上角点击→项目信息→选择坐标系统→在跳出的对话框里面更改投影下面的中央子午线,设为当地中央子午线;检查“平面转换”“椭球转换”“高程拟合”在为求参数之前都选择无→点击“保存”。
5)参数计算。①首先进入“5测量”图标,移动站在控制点上采集坐标,采集控制点时用∑/n按钮采集,即:平滑(控制点最少2个)。采集控制点坐标→点击测量里面最左上角“碎步点采集”按钮→选择控制点库→点击左下角“+”号按钮,输入已知控制点坐标。突出测量界面,点击 “3参数”,点击左上角→坐标系统→参数计算,在跳出的对话框里面点击添加→源点(已知点用GPS现场采集的坐标),下面目标点(次点对应的已知坐标)→保存(在这里我们不用输入,可以直接调用,点击“123”按钮找到点名确定即可)。两组点添加完成后点击“解算”,在跳出的对话框里面检查“旋转和缩放”,旋转是否接近0度,缩放是否接近1,若接近则点击“应用”,再点击“保存”,在跳出的对话框点击“OK”,然后点击打勾按钮,在退出的界面点“插”按钮退出。现在就可以进行测量。②平面控制:各挖泥船、测量船均配备GPS接收机系统,接收岸台发送的RTCM格式的差分GPS校正信号,实时动态显示架设天线点处坐标,控制抓泥船方位,从而在测量导航软件窗口中自动实时动态显示当时船位,指挥抓泥船定位施工。③测量船配备自动测深成图系统,由安装了中海达GPS测量导航和成图软件的便携式电脑自动同步收集、记录GPS定位数据和测深仪测深数据,实现数字化测图,可以迅速提供准确的水下地形测量成果,及时指导挖泥船施工。
2.2 RTK作业时应该注意的问题
2.2.1 有关基准站的问题
1)因为RTK技术的关键在于数据处理技术和数据传输技术,RTK定位时要求基准站接收机实时地把观测数据(伪距观测值,相位观测值)及已知数据传输给流动站接收机。所以:①电台天线要尽量高。②电源电量要充足,否则也将影响到作业距离。
2)设站时要限制最大卫星使用数,一般为8颗。如果太多,则影响作业距离;太少,则影响RTK初始化。
3)如果不是使用七参数,则在设置基准站时要使TransformTowg;ss4(转换到WGS84坐标系)处于off(关闭)状态。
4)如果使用七参数,则AX,AY,AZ都小于±100较好,否则重求。
5)在求转换参数前,要使参数转换和七参数关闭。
6)在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时不到1s。基准站和移动站必须要保持4颗以上相同卫星相位观测值的跟踪和必要的几何图形,则流动站可随时给出厘米级定位结果,所以有时偶尔RTK没有固定解也是很正常的。
2.2.2 有关流动站的问题
1)解的模式要使用RTKExtrap(外推)模式。2)数据链接收间隔要与基准站设置的发射间隔一致,都要为1。3)如果使用海洋测量软件导航、定位,则:①记录限制要为RTK固定解。②高程改正要在天线高里改正。4)差分天线要尽可能高。
3 水下地形测量
本工程水下高程测量使用RTK与测深仪(中海达HD-370)相结合进行测量。采用水尺校核。RTK提供实时三维坐标,数字测深仪提供同步水深,水尺效核潮位,确定目标测点高程。
3.1 测前的准备
1)求转换参数。①将RTK基准站架设在已知点A上,设置好参考坐标系、投影参数、差分电文数据格式、发射间隔及最大卫星使用数,关闭转换参数和七参数,输入基准站坐标(该点的单点84坐标)后设置为基准站。②将GPS移动站架设在已知点B上,设置好参考坐标系、投影参数、差分电文数据格式、接收间隔,关闭转换参数和七参数后,求得该点的固定解(84坐标)。③通过A、B两点的84坐标及当地坐标,求得转换参数。
2)建立任务,设置好坐标系、投影、一级变换及图定义。
3)做计划线,如果已经有了测量断面就要重新布设,但可以根据需要进行加密。
3.2 外业的数据采集
1)基准站应架设在求转换参数时架设的基准点上,且坐标不变。
2)将GPS接收机、数字化测深仪和便携机等连接好后,打开电源。设置好记录、定位仪和测深仪接口、接收机数据格式、测深仪配置、天线偏差改正及延迟校正。[2]
3)作业时,打开海洋测量软件,根据施工要求预先绘画出测量区域和断面线,安装并调试好GPS和测深仪;到实地作业时主要开启GPS和海洋测量软件,屏幕上的导航窗口就能实时显示出测量船位置、航迹向和坐标,当接通相应的数字化测深仪时,水深显示窗口就显示出瞬时水深值,引导测量工作船沿待测断面线航行,计算机自动采集数据并储存。
3.3 水下泥面标高换算
基本原理:利用实时相位差分(RTK)实时测得GPS天线的三维坐标(x,y,h)结合由测深仪同步测得的换能器至海底的深度ΔH1,将由GPS测得的天线高h换算到同一水平面上的水下泥面标高H。换算公式

式中ΔH2为连接GPS天线与测深仪换能器的联杆长度。
由于系统在测量过程中是处于运动状态,GPS接收仪与测深仪的数据采集也是随着运动同步进行的,显然在上述的测量过程中,与水面变化无关,无需对水面高程进行测定,即无需验潮。
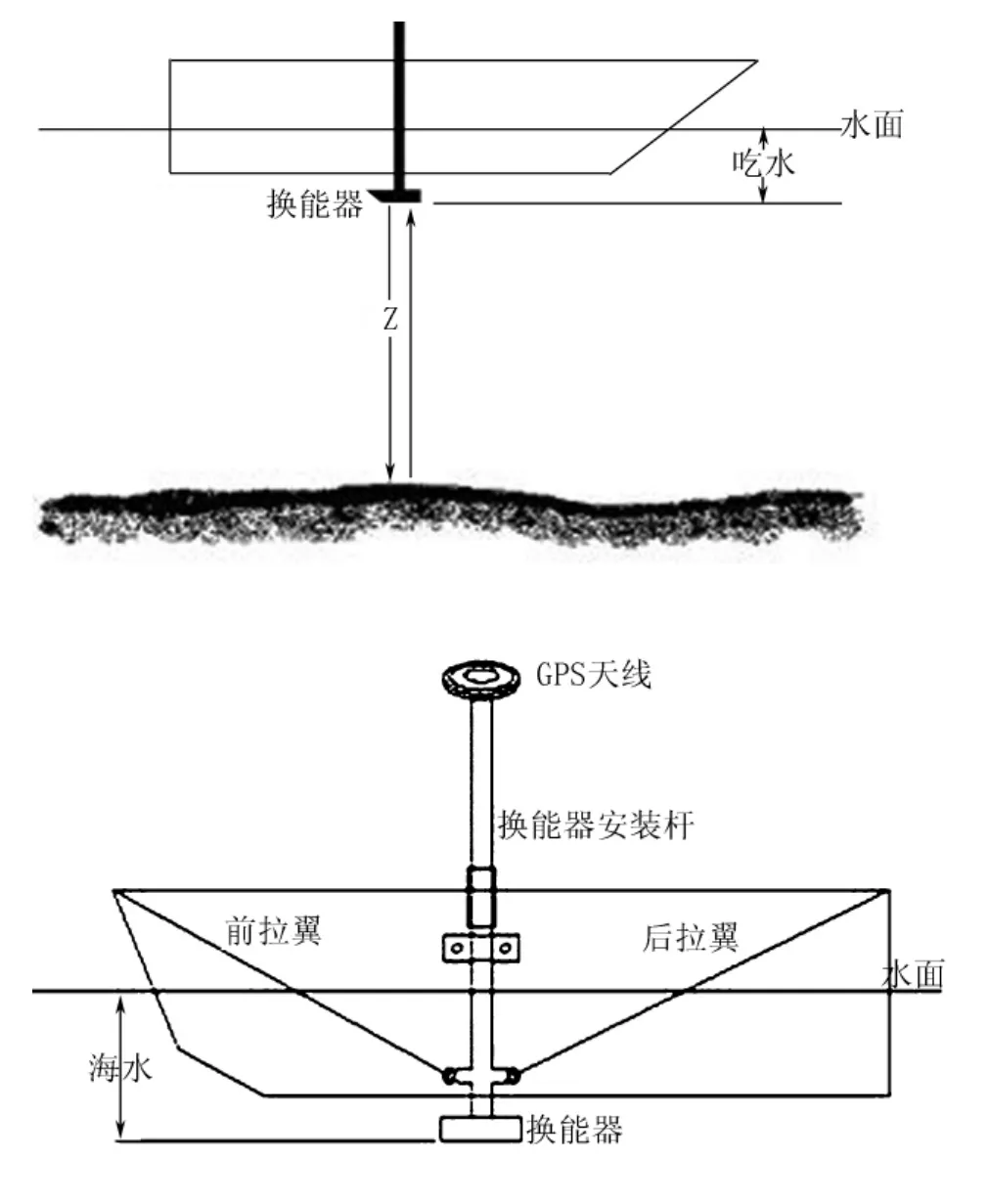
图3 水下泥面标高换算示意图
3.4 数据的内业处理
1)将外业所测数据存入电脑。测深仪电脑显示界面图如图4所示。

图4 测深仪电脑显示界面图
2)所采集样点高程数据用中海达海洋成图软件对外业采集的数据进行编辑处理和修正,生成地形图(或水深图)、断面图或三维地形图等,自动计算断面填方面积和体积。数据处理和编辑是高度自动化。外业测量数据通过专用软件进行处理,可以快速绘制断面图,三维立体图可以直观地反映水下地形或抛石成型情况。用于疏浚港池、航道施工测量十分方便准确,相关断面资料、挖填方量信息可实时提取。GPS-RTK自动测深系统组形成抛石断面图如图5所示。
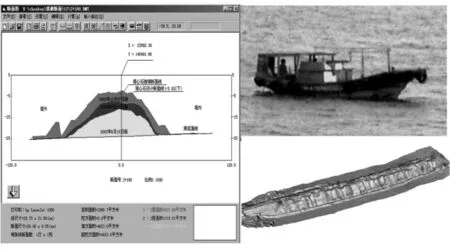
图5 GPS-RTK自动测深系统组形成抛石断面图
3.5 影响测量精度的几种因素及相应对策
1)船体摇摆姿态的修正。船的姿态可用电磁式姿态仪进行修正,修正包括位置的修正和高程的修正。姿态仪可输出船的航向、横摆、纵摆等参数,通过专用的测量软件接入进行修正。
2)采样速率和延迟造成的误差。GPS定位输出的更新速率将直接影响到瞬时采集的精度和密度,现在大多数RTKGPS最高输出率可达20Hz,而各种品牌测深仪的输出速度差异很大,数据输出的延迟也各不相同。因此,定位数据的定位时刻和水深数据的测量时刻的时间差造成定位延迟。对于这项误差可以在延迟校正中加以修正,修正量可在斜坡上往返测量结果计算得到,也可以采用以往的经验数据。
3)RTK高程可靠性的问题。RTK高程用于测量水深,其可信度问题是备受关注的问题。在作业之前可以把使用RTK测量的水位与人工观测的水位进行比较,判断其可靠性,实践证明RTK高程是可靠的。为了确保作业无误,可从采集的数据中提取高程信息绘制水位曲线(由专用软件自动完成)。根据曲线的圆滑程度来分析RTK高程有没有产生个别跳点,然后使用圆滑修正的方法来改善个别错误的点。[3]
3.6 实际案例
预设施工控制格网参数,根据以往类似工程的施工经验填补欠缺、抛填理坡作业,监测格网按5.0m× 2.0m设置可获得比较满意的效果。
按预设格网的测点密度进行水下地形测量。GPS移动站、测深仪、电脑及相关数据处理软件安装在小艇上,组成专用测量船,施测时采用定距(2m)打点方式记录测量数据,测量船沿预设测区测一遍即可获得该测区的水下地形资料数据。
1)原始数据(表1)

表1 原始数据表 m
2)水深处理数据整理图。将测区的水下地形资料数据用中海达海洋成图软件进行编辑处理和修正,生成如图6所示的地形图。

图6 水深处理数据整理图
4 结语
在海南国电西南部电厂配套码头疏浚工程水下地形测量过程中,测量船配备自动测深成图系统,由安装了中海达GPS测量导航和成图软件的便携式电脑自动同步收集、记录GPS定位数据和测深仪测深数据,实现数字化测图,可以迅速提供准确的水下地形测量成果,实时动态显示架设天线点处坐标,控制抓泥船方位,从而在测量导航软件窗口中自动实时动态显示当时船位,指挥抓泥船定位施工,为挖泥船施工提供指导依据。通过本工程水下地形测量方法,可以为今后同类工程施测提供重要的参考与借鉴。
[1]卢秀明.浅议东莞航道1︰2000水下地形测量工程实践经验[J].测绘,2009(1):22-24.
[2]佘继红.利用网络RTK进行水下地形测量的方法探讨[J].现代测绘,2010(4):18-21.
[3]许宝华,何慧兰.提高河口地区水下地形测量精度的方法[J].地理空间信息,2010(5):28-30.
The Discussion on Technology of Underwater Topographic Survey in Dock Dredging Project
WANG Chun-cha
(Department of Road engineering,Fujian Chuanzheng Communications College,Fuzhou350007,China)
In this article,the Hainan wharf dredging underwater topographic survey is adopted as the research object,the use of GPS-RTK and some problems should be paid attention to have been introduced.The project of underwater topography measurement process has been given,several factors with the effect of underwater topography measurement accuracy and the corresponding countermeasures have been analyzed.Through this actual project cases,the results are carried out to verify.It has important reference value for the future relevant work.
GPS-RTK;underwater terrain survey;zhong hai da;actual case
P229.1
A
1009-8984(2016)02-0071-04
10.3969/j.issn.1009-8984.2016.02.017
2016-01-09
王春茶(1973-),男(汉),福建永春,副教授主要研究工程测绘。
猜你喜欢
中学生天地(A版)(2022年10期)2022-11-23
当代陕西(2020年23期)2021-01-07
劳动保护(2018年8期)2018-09-12
少年文艺·我爱写作文(2017年6期)2017-06-12
公民与法治(2016年19期)2016-05-17
安徽地质(2016年4期)2016-02-27
读者·校园版(2015年7期)2015-05-14
全球定位系统(2015年4期)2015-02-28
商业评论(2014年9期)2015-02-28
浙江国土资源(2014年5期)2014-04-28
