高压电线除冰机器人
2016-08-17 04:15:38刘哲成
发明与创新·中学生 2016年2期
刘哲成
高压电线结冰后需要抢修与维护时,由于工作条件恶劣,人工作业存在难度大、危险性高、费用高的弊端。本文在机械手工作原理的基础上,提出了一种高压电线除冰机器人的设计构想。
一、机械手的组成及工作原理
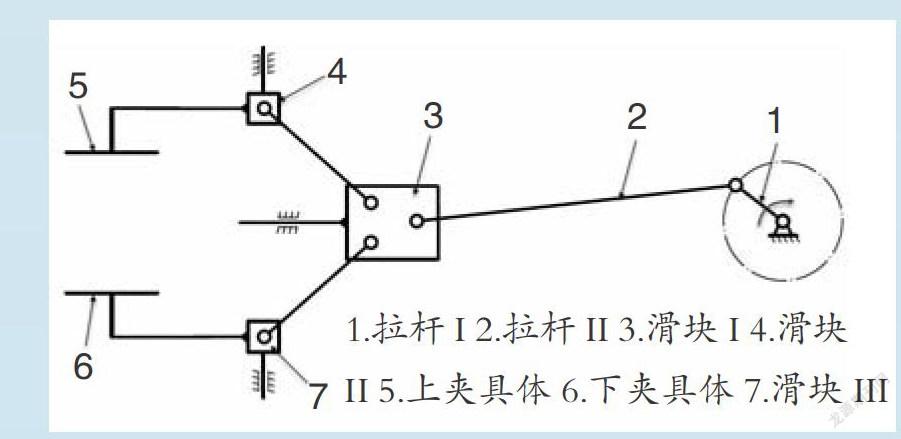
机械手是一种能模仿人手某些动作的器械,主要用来代替人抓取、搬运物体。作为一种早期的机器人,它被用来代替人类做一些繁重的劳动,并能在恶劣环境下工作,因而被广泛应用。其结构如图1所示。
img src="https://img.resource.qikan.cn/markdps/qkimages/fmcs/fmcs201602/fmcs20160227-1-l.jpg?auth_key=1664034839-141656821-0-1ee0d6ad07965302d58f1b044dfc8cad" alt="" />
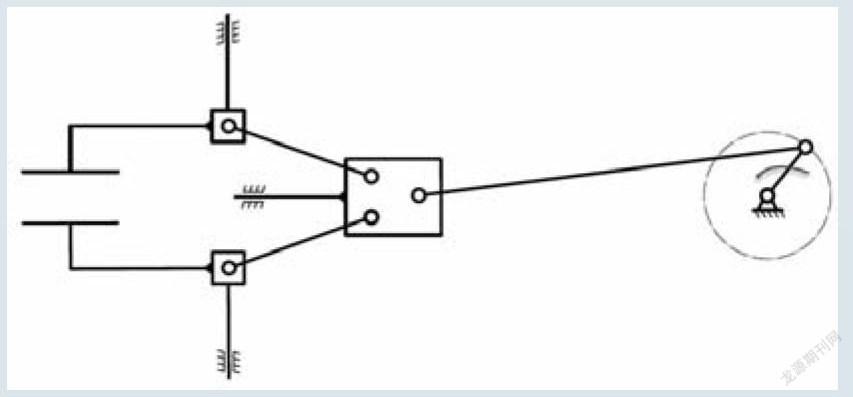
当右边的拉杆I顺时针旋转时,拉杆II带动滑块I向右运动,此时,上、下夹具体分别随滑块II、III向中间靠拢,这样机械手就可将物体夹起,如图2。
二、除冰機器人设计构想
以机械手工作原理为基础,我提出一种高压电线除冰机器人,其结构如图3所示。为提高除冰效率,需在机械手的夹具体上添加细齿。
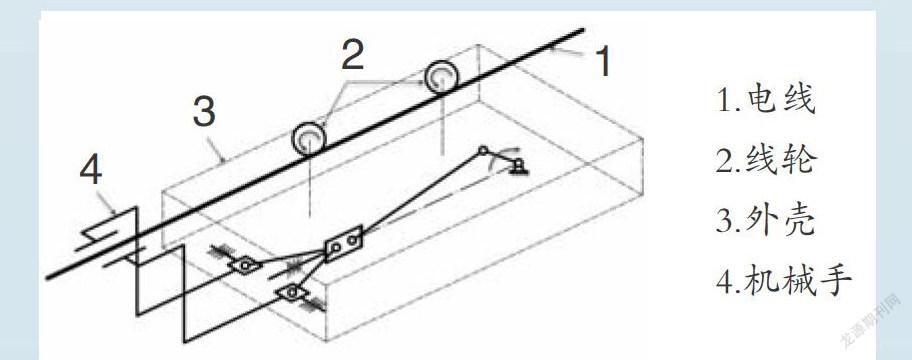
高压电线除冰机器人在线轮的转动下沿电线前进,当拉杆I顺时针转动时,通过拉杆II、滑块I、II、III的传递,机械手的夹具体将高压电线夹住,从而将高压电线上的冰块除掉,如图4。

猜你喜欢
中学生英语·中考指导版(2023年1期)2023-07-04 04:44:28
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:38
锻压装备与制造技术(2021年3期)2021-08-13 08:39:54
作文周刊·小学一年级版(2021年36期)2021-01-14 00:44:31
广东第二课堂·小学(2017年9期)2017-09-28 14:51:06
铁道机车车辆(2016年3期)2016-10-25 09:02:43
发明与创新(2016年5期)2016-08-21 13:42:50
家教世界·创新阅读(2016年2期)2016-05-30 20:28:23
农家科技中旬版(2016年12期)2016-04-16 03:41:35
电测与仪表(2016年13期)2016-04-11 11:22:38