基于模糊-PID控制的水冲洗机器人液压伺服控制系统
2016-08-12 09:42郭祥洋鲁守银高鹏刘存根胡涛
山东科学 2016年4期
郭祥洋,鲁守银,高鹏 ,刘存根,胡涛
(1.山东建筑大学机器人与智能系统研究院, 山东 济南250101;2.山东省城乡规划设计研究院,山东 济南 250013)
基于模糊-PID控制的水冲洗机器人液压伺服控制系统
郭祥洋1,鲁守银1,高鹏2,刘存根1,胡涛1
(1.山东建筑大学机器人与智能系统研究院, 山东 济南250101;2.山东省城乡规划设计研究院,山东 济南 250013)
摘要:变电站带电作业水冲洗机器人是针对220 kV变电站污闪问题研制的特种机器人,本文针对机器人的液压伺服控制系统的非线性特点建立数学模型,对该模型提出了模糊-PID综合控制方案,并对控制方案在理想条件和受干扰条件下进行Matlab仿真和变电站环境下的实地实验。结果表明,该控制方案能够提高机器人液压伺服控制的精度,并且具有一定的抗干扰性。
关键词:水冲洗机器人;液压伺服控制系统;模糊-PID控制;仿真
持续电力供应已经成为影响当今社会发展的重要因素,变电站的正常运行是持续电力供应的一个重要环节。由于大气中很多污染物长时间沉积在绝缘柱的表面上,降低了绝缘性能,容易发生污闪事故[1],造成大面积停电。国内当前多采用人工水冲洗,工作效率低、危险系数高,上海交通大学发明的关节式超高压带电清扫机器人HVCR-II提高了清扫工作效率,但毛刷的清扫对绝缘子具有一定的摩擦伤害[2]。韩国电力研究院研制的变电站绝缘子干洗机器人[3]小巧便捷,但效率相对较低。带电水冲洗较其他冲洗技术效率更高,且对变电站设备没有伤害,是当前重要的清洗技术之一[4]。
为此,我们研制了对变电站带电作业水冲洗机器人,在对机器人系统进行研发时, 发现较难采用一种精确的数学模型对其进行控制,特别是为整个机器人提供动力的液压伺服系统,具有较强的非线性,而变电站带电清洗作业对整个机器人的线性和鲁棒性要求较高。模糊控制是一种不依赖于数学模型, 且有很强的鲁棒性的控制方法;而传统PID控制为线性控制,具有较平稳的输出[5],这为液压伺服系统的控制研究提供了理论基础。结合两种控制方法形成模糊-PID综合控制,该控制方法能够在提高响应速度的同时减小超调,同时增强系统的鲁棒性[6]。本文将该方案应用于机器人液压伺服控制系统中,仿真和实地实验都取得了较好的控制效果。
1 整体设计
水冲洗机器人包含移动车体、液压动力系统、机械臂以及控制系统,变电站带电作业水冲洗机器人结构示意图如图1所示。移动车体采用履带式行走机构,四条支腿实现对机器人的固定和支撑;液压动力系统驱动机器人各个关节和机构进行动作;机械臂具有大臂回转、大臂俯仰、小臂伸缩、平台俯仰和平台回转5个自由度,通过平台回转机构与车体相连。机械臂具有3级升降机构,在升降机构的末端装有俯仰和回转平台,高压喷枪固定在平台上,能满足不同位姿冲洗的需求。
机器人控制系统采用人-机交互的智能控制方式,操作人员对水冲洗的操作任务进行分析,制定冲洗作业流程,机器人按流程进行组织、协调和执行。在这个过程中机器人实时反馈状态信息,操作人员根据信息不断进行修正。

图1 变电站带电水冲洗移动机器人Fig.1 Water cleaning robot of a substation
2 液压系统
水冲洗机器人由柴油机提供动力,通过联轴器与液压泵相连,为整个液压系统提供液压能。水冲洗机器人的液压系统主要应用于履带式工作机移动平台、4个液压支腿和5个自由度的机械臂,移动车体的移动、支腿的伸缩和机械臂的运动分别通过机器人的下部电磁换向阀组、上装电磁换向阀组和液压伺服阀组进行控制,各阀组再通过分配阀与液压泵连接。
3 液压系统数学模型的建立
机器人的位姿对于整个清洗作业喷射过程较为重要,因此,要针对机器人进行位置伺服控制。本文以四通滑阀为研究对象,液压缸采用对称式的,将单个自由度的机械臂的液压伺服控制系统简化为一个二级线性系统,机器人的液压伺服控制系统如图2所示[7],图中控制器对整个液压系统输出动作控制的信号,伺服放大器则实现对信号的放大,电液伺服阀将放大了的信电信号转换成液压信号,用来驱动液压缸进行动作,传感器将动作的实际运行结果反馈到输入端,过程中因元件不同产生不同的增益。下面分别进行数学建模。

图2 液压伺服控制结构图Fig.2 Structure chart of hydraulic servo control
3.1伺服放大器数学模型
在整个系统中伺服放大器对信号具有线性比例放大的作用,将电压信号转化为放大的电流信号,即
UrKf=I,
(1)式中,Ur为伺服放大器的输入电压,V;Kf为伺服放大器的放大系数,A/V;I为伺服放大器的输出电流,A。
3.2伺服阀数学模型
伺服阀传递函数为
采用相似性搜索法(BLAST1)和最小距离法对滨海白首乌及其近缘种进行鉴定研究,2种方法分析结果均表明ITS2序列可以准确地将3种滨海白首乌之间及与近缘种鉴别开。为了更直观地反映鉴定结果,本研究基于相似性搜索法和最近距离法结果构建了NJ系统聚类树(图2),bootstrap 1 000次重复。滨海白首乌与戟叶牛皮消及隔山消聚为一支,且互有区别。滨海白首乌与鹅绒藤属的植物距离较近,与萝藦科其他物种可以明显区分开。

(2)
式中,Ksv为伺服阀的流量系数,m3/s·A;ωsv为伺服阀的固有频率,rad/s;Q0为伺服阀的空载流量,m3/s;ΔI为伺服阀的输入电流增量,A;ξsv为伺服阀的阻尼比;s为复频域变量。
3.3阀控缸数学模型
阀控缸的动态特性在控制系统中具有重要的作用,其基本的流量方程有[8]:
滑阀的基本流量特性方程
Ql=KqXl-KcPl,
(3)
式中,Ql为伺服阀的负载流量,m3/s;Kq为滑阀总的流量系数,m2/s;Xl为滑阀阀芯的位移,m;Kc为滑阀在稳定工作点附近的流量压力系数,(m3/s)/MPa;Pl为负载压差,MPa。
液压缸和负载的力平衡方程

(4)
式中,Ap为活塞有效面积,m2;x为活塞位移,m;Bp为活塞和负载的粘性阻尼系数,N/(m/s) ;K为负载的弹性刚度,N/m;m为活塞及负载的总质量,kg;fh为负载的摩擦力,N;f为负载阻力,N。
液压缸连续性方程

(5)式中,Cp为液压缸总的泄漏系数,m3/(MPa·s);V0为两个油腔的总容积,m3;βe为有效体积弹性模数,N/m2。
机器臂在运动过程中所受的弹性阻力较小,可以将其忽略;同时机器人应用无阻尼缸,粘性阻力较小,同样将其忽略。在建立力平衡方程时只需考虑负载的摩擦力fh和任意负载阻力f,设F=f+fh,对式(3)、(4)、(5)进行拉氏变换得
Ql=KqXl-KcPl,
(6)
ApPl=ms2X+F,
(7)

(8)
联合方程(6)、(7)、(8)可得到阀控缸的位移数学模型的方程为

(9)
则指令输入的传递函数分别为
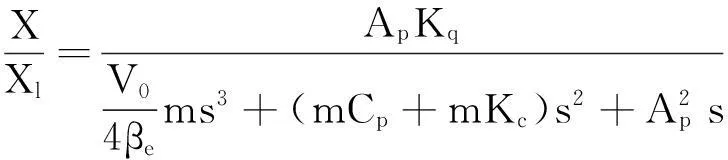
(10)
令

可得液压缸的传递函数为

(11)
3.4位置传感反馈
位置传感器是将机器人动作的角度或者位移值(这里以大臂回转的角度为180°为例)转化为电信号反馈到控制的输入端,可以将其看作两个比例模型:
Uy=Kyθ,
(12)
θ=KθX。
(13)
Uy=KyKθX,
(14)
式中,Uy为位移反馈电信号,V;Ky为位移转化系数,V/(°);Kθ为角度位移转化系数,(°) /m;θ为关节转动角度,(°)。
水冲洗机器人系统中,根据计算和调试的经验,得到相应的设置参数表(机器人采用丹弗斯PVG32伺服比例阀组[6]),如表1所示。

表1 参数设置表
4 基于模糊-PID控制的液压伺服控制系统
4.1模糊-PID位置伺服控制
由于液压伺服系统具有较强的非线性,且位置伺服控制本身具有一定的时变特性和干扰性,较难满足机器人清洗作业的需求。本文将鲁棒性强的模糊控制和具有良好线性的传统PID控制结合,形成综合控制-模糊-PID控制[9],用以控制液压伺服系统。模糊控制的鲁棒性能够有效地滤除液压系统自身扰动及变电站其他信号带来的干扰,具有一定的抗外部干扰的能力,将液压系统维持在较稳定的状态。通过上一节推理的结果,得到机器人液压系统的模糊-PID位置伺服控制图如图3所示。
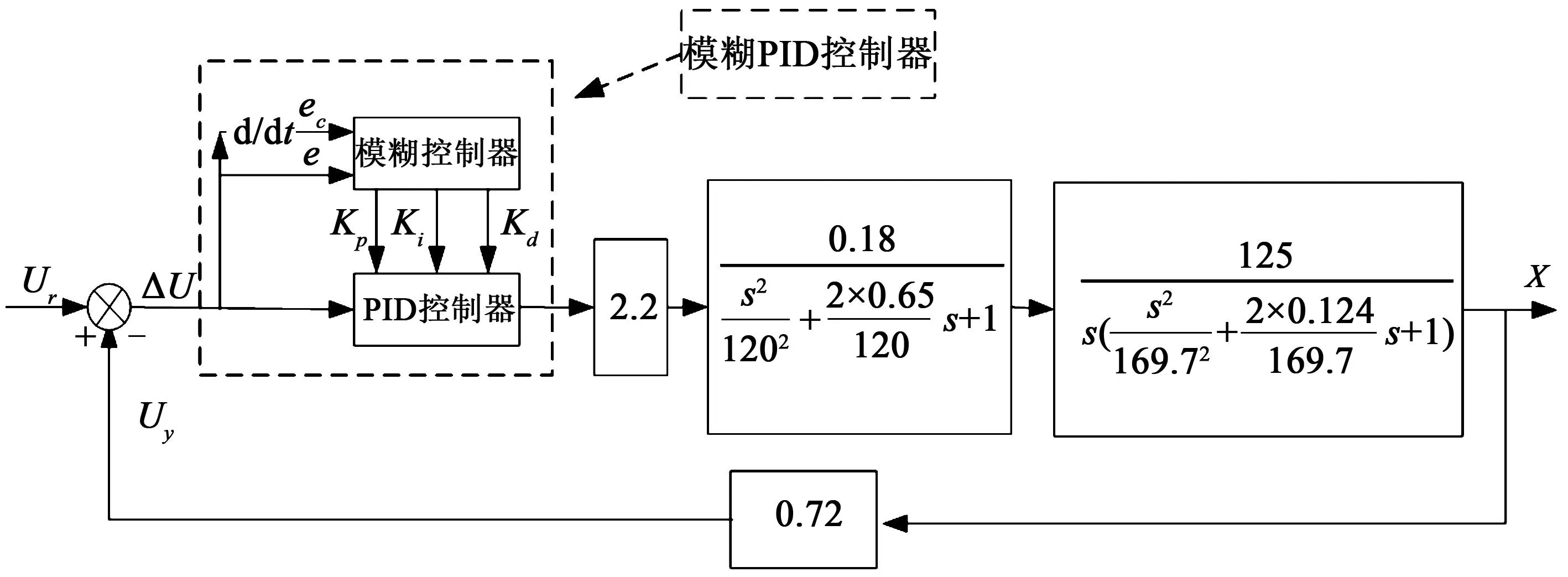
图3 模糊-PID位置伺服控制图Fig.3 Fuzzy PID- position servo control chart
4.2仿真
考虑到机器人液压伺服系统位置控制的特点,模糊-PID控制器采用二维模糊控制器[10],以位置误差e及误差的变化率ec作为输入,以Kp、Ki、Kd作为输出。首先对输入和输出变量进行模糊化处理,设定的语言值为{NB(负大)、NM(负中)、NS(负小)、Z(0)、PS(正小)、PM(正中)、PB(正大)}。根据对水冲洗机器人的液压伺服控制的调试经验,要求在0附近时要控制精确,两边的控制精度可以稍微降低,因此在选择各个变量的隶属度函数时,在中间采用灵敏度较好的三角(trimf)函数,两边则采用较为简单的Z形(zmf)函数。同时,为增加在开始阶段控制的灵敏性和精确性,在0附近的论域设置的比较紧密。e、ec、 Kp、Ki和Kd的隶属度函数及响应的论域如图4所示。

图4 各变量的隶属度函数Fig.4 Membership function of individual variable
利用Mamdani法和加权平均法进行模糊推理和去模糊化,总结各个变量之间的模糊规则,如表2所示。通过实时检测e和ec,根据模糊规则实时地对Kp、Ki和Kd3个参数进行在线调整,以提高液压伺服控制的稳定性和响应速度,对变电站干扰信号也有一定的抑制作用。

表2 模糊控制规则表
通过Matlab(Simulink)建立液压伺服系统的模糊-PID控制仿真模型,如图5所示(此模型中只有阶跃信号作为输入信号),其中PID控制器的Kp、Ki和Kd3个参数分别设为3.2、1.31和0.000 3。
在对水冲洗机器人进行控制时,主要考虑机器人开始动作和连续动作两个过程,因此对应仿真模型中分别以单位阶跃信号和正弦波信号作为起始信号以模拟这两个过程。鉴于变电站的复杂环境,在进行仿真时考虑到理想条件和受干扰条件两个情况。在理想无干扰的条件下得到仿真图如图6~7所示。

图5 模糊-PID控制仿真模型Fig.5 Simulation model of fuzzy-PID Control
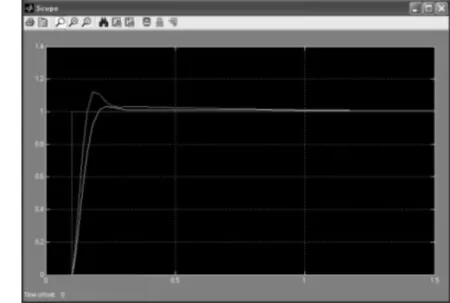
图6 理想条件阶跃信号系统仿真图Fig.6 System simulation figure of ideal step signal
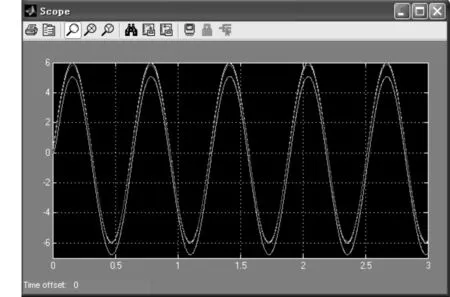
图7 理想条件正弦波信号系统仿真图Fig.7 System simulation figure of sine wave signal in ideal condition
从图6容易看出,当输入阶跃信号时,模糊-PID控制比常规PID控制响应速度更快,常规PID控制超调9%左右,而模糊-PID控制超调仅为1%左右,且没有产生震荡现象,稳定性更高。从图7中可以看出,当输入正弦波信号时,常规PID峰值超调接近10%,模糊-PID控制峰值更接近于原始的正弦波信号,且跟随性更好。
由于机器人所处变电站环境容易受到高压强磁环境的影响,因此在上述仿真模型的信号输入端同时加入一定的高斯白噪声作干扰信号,得到了在干扰信号下以高斯噪声、阶跃信号和正弦波信号为输入信号的仿真图,如图8~10所示。

图8 高斯白噪声系统仿真图Fig.8 System simulation figure of Gaussian white noise
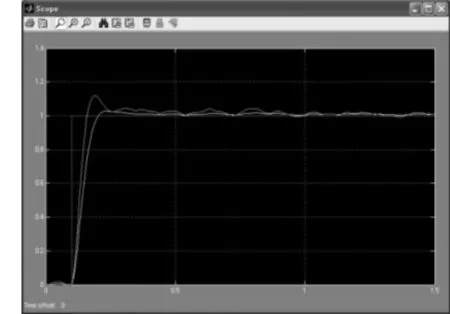
图9 干扰条件阶跃信号系统仿真图Fig.9 System simulation figure of step signal in interference condition
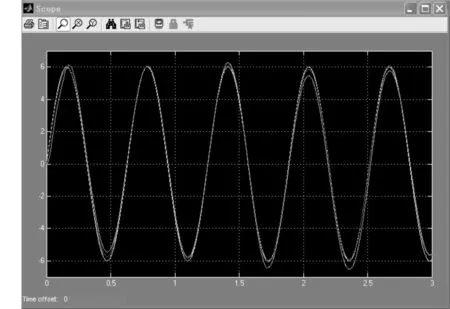
图10 干扰条件正弦波信号系统仿真图Fig.10 System simulation figure of sine wave signal in interference condition
从图8中可以看到,模糊-PID控制对高斯噪声有较好的过滤作用。从图9~10可以看出,传统PID控制能够对噪声信号起到一定的调节作用,但作用不是很明显,出现了噪声引起的震荡现象,随着时间的推移,仿真结果并没有得到任何的改善。而模糊-PID控制能够有效地滤除噪声信号的干扰作用,受干扰信号影响比较微弱,体现出该系统较好的鲁棒性,但抗干扰程度受当前模糊推理规则的限制。

图11 机器人水冲洗实验图Fig.11 Water cleaning experiment figure of the robot
4.3实地实验
在遵守电业安全工作规程的前提下,应用机器人进行了一系列变电站冲洗实验,如图11所示。通过实验表明,机器人各个关节及行走机构反应灵敏,控制精度较高,稳定性和流畅性较好
5 结论
变电站水冲洗机器人能够通过对绝缘子进行水冲洗来解决污闪事故,高效、便捷、安全而且无伤害。本文对液压伺服系统进行了研究,并应用模糊-PID混合控制对其进行控制。该设计提高了机器人液压伺服控制的精度,并且具有一定的抗干扰性。但在研究过程中发现,因为当前模糊规则的局限性,液压伺服控制的精度还有待提高。同时本文主要是对单关节进行研究,对多关节伺服控制的耦合性没有作进一步的探讨,这将是今后的研究方向。
参考文献:
[1]白雪莲,杨玲.浅谈输变电设备的防污闪措施[J].中国电子商务,2010(4):167.
[2]李健,鲁守银,董旭.变电站带电作业水冲洗机器人的研制[J].制造业自动化.2015,37(5):67-71.
[3]PARKJY,CHOBH,BYUNSH.Developmentofautomaticcleaningrobotforlive-lineinsulators[M]//IEEE11thInternationalConferenceonTransmission&DistributionConstruction,OperationandLive-LineMaintenance(ESMO2006).[S.l.]:IEEE,2006.
[4]王庆昌.浅谈带电水冲洗在新疆电力系统的应用技术及故障分析[J].大众科技,2010(11):124-126.
[5]江桂云,王勇勤,严兴春. 液压伺服阀控缸动态特性数学建模及仿真分析[J]. 四川大学学报(工程科学版),2008,40(5):195-198.
[6]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,30(1).:166-172.
[7]顾毅,翁新华,杨汝清,等.关节式超高压带电清扫机器人HVCR-II[J].上海交通大学学报,2016,40(12):2173-2176.
[8]高明玉.基于模糊控制的液压伺服控制系统研究[J].机械工程与自动化.2014(4):158-159.
[9]赵升吨,魏树国,王军.液压伺服控制系统研究现状的分析[J]. 伺服控制,2006(11):16-23.
[10]邓勇. 智能PID控制器在阀控液压控制系统中的应用[D].哈尔滨:哈尔滨工业大学,2007.
DOI:10.3976/j.issn.1002-4026.2016.04.019
收稿日期:2016-06-02
基金项目:国家高新技术研究发展计划(863计划)(2012AA041506)
作者简介:郭祥洋(1988-),男,硕士,研究方向为智能机器人。Email:guoxy126@126.com
中图分类号:TP242
文献标识码:A
文章编号:1002-4026(2016)04-0099-07
Fussy-PID control based hydraulic servo controlsystemofwatercleaningrobot
GUO Xiang-yang1,LU Shou-yin1,GAO Peng2,LIU Cun-gen1,HU Tao1
(1.Robotics and Intelligent System Institute, Shandong Jianzhu University, Jinan 250101, China;2.ShandongUrbanandRuralPlanningDesignInstitute,Jinan250013,China)
Abstract∶Water cleaning robot of a substation is a special robot. It is developed for the issue of "Pollution Flashover" of 220 kV substation. We establish a mathematical model for non-linear characteristic of its hydraulic servo system. We further present a fuzzy-PID control scheme for the model and perform Matlab simulation and practical substation experiment under ideal and interfered conditions. Results show that the scheme can improve the accuracy of its hydraulic servo control, and has certain interference suppression capability.
Key words∶water cleaning robot; hydraulic servo control system; fuzzy-PID control;simulation
猜你喜欢
现代电子技术(2016年23期)2017-01-12
青年时代(2016年19期)2016-12-30
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
考试周刊(2016年83期)2016-10-31