
一种直航+迎面的反鱼雷鱼雷拦截弹道设计方法*
2016-08-11 06:19于昌荣
舰船电子工程 2016年4期
于昌荣
(江苏自动化研究所 连云港 222061)
一种直航+迎面的反鱼雷鱼雷拦截弹道设计方法*
于昌荣
(江苏自动化研究所连云港222061)
摘要分析了目前现有的三种反鱼雷鱼雷拦截弹道设计方法,在此基础上给出了一种直航+迎面的反鱼雷鱼雷拦截弹道设计方法。该方法通过ATT发射后通过直航快速接近目标航向线,然后旋回进行迎面拦截,既能尽早拦截鱼雷,又能尽量减少来袭鱼雷距离和航向误差的影响,提高舰艇使用ATT拦截来袭鱼雷的效果,可进一步提升舰艇的生存能力。
关键词反鱼雷鱼雷; 拦截弹道; 迎面拦截
Class NumberTJ630
1 引言
反鱼雷鱼雷(anti-torpedo torpedo, ATT)作为一种舰艇防御、鱼雷对抗的硬杀伤装备,已经得到了许多国家的重视,美国、俄罗斯、法国、德国等海军强国均开展了ATT的研制和试验[1~3]。
ATT的拦截弹道是影响其作战使用和拦截概率的重要因素之一。ATT的拦截弹道与舰艇、来袭鱼雷和ATT三者的诸多因素有关,包括舰艇报警声纳的性能、舰艇的运动参数,来袭鱼雷的攻击弹道形式和运动参数,以及ATT的攻击弹道形式和运动参数等[4]。来袭鱼雷的攻击弹道形式通常是未知的,舰艇的报警声纳可以给出来袭鱼雷的某些参数,如方位、距离和速度等。来袭鱼雷的未知特性为ATT拦截弹道的设计带来了难度。
目前的文献资料主要讨论舰艇在发射ATT时,来袭鱼雷已进入自导导引状态,以固定提前角方式攻击舰艇,给出了三种拦截弹道方案[5~8],本文将在对其分析的基础上,给出一种直航+迎面的反鱼雷鱼雷拦截弹道设计方法。
本文分析了反鱼雷鱼雷的拦截弹道设计技术研究现状,给出了一种直航+迎面拦截的反鱼雷鱼雷拦截弹道设计方法。该方法可为提高舰艇的生存能力提供技术支撑。
2 研究现状
文献资料给出的三种拦截弹道如下。
2.1直接拦截方案
设来袭鱼雷速度为Vt,本舰航速为Vs,舰艇与鱼雷的速度比为p,k=1/p为鱼雷与舰艇的速度比,来袭鱼雷固定提前角为η。如图1所示,以舰艇发射ATT时的位置为坐标原点,本舰航向为x轴建立直角坐标系,R0和R为来袭鱼雷同本舰之间的距离。q0和q为来袭鱼雷视线角,θ0为舰艇对鱼雷的观测方位角,β为ATT的发射角,t为ATT从发射到命中所经历的时间,VA为ATT航速,rA为ATT的旋回半径。ATT发射时来袭鱼雷位于T点,ATT发射后于A点处命中鱼雷,S为舰艇在ATT命中来袭鱼雷时的位置。
直接拦截方案借鉴鱼雷攻击相关理论,采用解相遇的方法,ATT发射后一直直航,直至命中鱼雷。ATT发射角β计算公式详见文献[6]。
2.2迎面拦截方案
迎面拦截方案采用迎面拦截鱼雷方法,ATT发射后即旋回直到迎面拦截到鱼雷,如图2所示。计算公式详见文献[6]。

图1 直接拦截方案

图2 迎面拦截方案
2.3基于相遇区域的拦截方案
基于相遇区域的拦截方案考虑了攻击弹道形式未知的情况,针对每一种攻击弹道形式,采用ATT拦截均对应一个相遇点,所有相遇点的集合构成了一个相遇区域,如图3所示。取两种边缘情况发射角的算数平均作为为ATT的发射角[7],即取相遇区域几何中心所对应的拦截弹道发射角。

图3 基于相遇区域的拦截方案
直接拦截方案采用直航搜索的方式满足了攻击时间短的需要,但对要素的精度要求较高,而实际作战中来袭鱼雷要素的误差一般都较大,直接拦截的效果相对较差。迎面拦截方案使ATT旋回到来袭鱼雷航向上,这样可尽量减少来袭鱼雷距离误差对ATT使用效果的影响,还可利用自导扇面遮盖来袭鱼雷方位的误差,因此拦截效果相对较好。基于相遇区域的拦截方案考虑了来袭鱼雷不同弹道的影响,比较贴近实际,但是没有考虑舰艇、来袭鱼雷与ATT三者的初始情况,运动参数以及测量精度、误差分布等对ATT拦截效果有影响的因素。本文将在这三中拦截方案的基础上,考虑各种影响因素,综合各方案的优点,设计出一种新的拦截弹道,即直航+迎面拦截方案。
3 拦截弹道设计
攻击水面舰艇的鱼雷主要有声自导鱼雷、尾流自导和线导鱼雷。在水面舰艇声纳鱼雷报警后,一般首先会采用噪声干扰器、声诱饵等软对抗器材,同时机动规避。若来袭鱼雷未被干扰或诱骗,则使用ATT。此时,对声自导鱼雷而言,可能处于直航搜索状态或已经进入追踪导引状态。鱼雷追踪时一般采用尾追或固定提前角方式[9]。
未来装备技术的发展或者ATT作战方式的改变, 可能提供完整的来袭鱼雷航行参数信息。本部分研究了假设在已知来袭鱼雷的航向、航速和距离时, ATT的射击方向和作战使用方法。一般来袭鱼雷距本舰3000m以内时,可使用ATT。可以认为水面舰艇有一定的时间进行鱼雷要素解算,即来袭鱼雷的信息是完整的[10]。
3.1设计思路
ATT拦截鱼雷时,具有攻击时间短、全弹道精确导引和一次性攻击,没有机会进行再搜索等特点,弹道设计分为两段:搜索段和导引段[11]。
1) 搜索段
搜索段主要包括搜索初期的直航搜索段和迎面搜索段两部分。
(1)搜索初期的直航搜索段
发射ATT时,鱼雷目标一般离本舰艇较近,留给ATT攻击的时间短,ATT应在保证其运动姿态平稳的同时以最快速度到达攻击方向,开始进行目标搜索。因此,搜索初期考虑采用直航搜索,即ATT在出管后迅速完成寻深,并转向至设定航向,完成一次转角,到达设定航向后即直航搜索。在搜索段初期ATT采用直航搜索的方式既满足了攻击时间短的需要,同时也能保证对来袭鱼雷的发现和攻击。
(2)迎面搜索段
在来袭鱼雷航向上迎面搜索,可通过设定迎面搜索的时机,以消除来袭鱼雷距离误差的影响,同时在来袭鱼雷航向上迎面搜索,可利用ATT的自导扇面,遮盖住来袭鱼雷方位误差。
2) 导引段
在ATT自导系统发现目标后,即进入导引段。由于ATT与来袭鱼雷呈迎击态势,相对速度较大,采用提前角导引法有利于保证导引效果。
3.2参数计算方法
拦截弹道形式如图4所示。主要分为三个部分,即搜索初期的直线航行段、旋回段、迎面拦截直航段。其中旋回段为过度阶段,设计时为了尽快转向到来袭鱼雷航向上,可设定旋回半径为ATT的最小旋回半径ra。
基于上述思路,设计拦截弹道时需确定的参数包括发射角β、直航段距离Dz、旋回角度α以及迎面拦截直航段距离Dy等。
迎面拦截直航段距离Dy的确定,主要考虑能消除来袭鱼雷距离误差的影响,如图5所示。

图4 ATT拦截弹道设计示意

图5 距离误差对拦截的影响
考虑到鱼雷追踪时,提前角一般较小,因此,可近似取Dy等于ATT发射时刻来袭鱼雷的距离误差大小ΔR0。
接着依据态势几何关系,求出∠BOA的大小,同时用直接拦截法计算出直接拦截情况下的发射角β′[8],则ATT发射角β为
β=β′-∠BOA
再利用态势几何关系,求出旋回角度α和直航段距离Dz即可。
4 仿真分析
4.1仿真想定
ATT弹道仿真涉及的因素很多,仿真中进行了必要的简化和假设,主要包括以下几个方面:
1) 来袭鱼雷已经进入自导导引阶段,以固定提前角法攻击舰艇;
2) ATT发射后按预定的弹道航行,同时自导系统工作,搜索来袭鱼雷;
3) ATT的自导系统采用主被动联合自导模式。仿真中,若来袭鱼雷处于ATT的自导搜索扇面内,且与ATT的距离小于自导作用距离,则认为ATT自导系统捕获到来袭鱼雷,并由自导导引ATT拦截来袭鱼雷;
4) 由于ATT自导系统的被动自导作用距离比主动自导作用距离远,一般是被动自导先捕获到来袭鱼雷;当进入主动自导作用距离后,转入主动自导。ATT自导导引时采用提前角法;
5) 假设ATT采用全方位非触发引信,引信作用距离20m,即ATT与来袭鱼雷距离小于等于20m时视为拦截成功。
4.2仿真设定参数
设ATT主被动自导作用距离分别为250m和800m,主被动自导搜索扇面角都是120°,自导导引时固定提前角大小为5°,ATT搜索速度36kn,最小旋回半径参照鱼雷性能设定为70m,旋回角速度大小20°;来袭鱼雷速度50kn,固定提前角大小取0~10°均匀分布,与水面舰艇初始距离D0=3000或2000m,均方误差15%D0,方位均方误差4°;水面舰艇速度18kn,航向90°且一直直航。
4.3仿真结果及分析
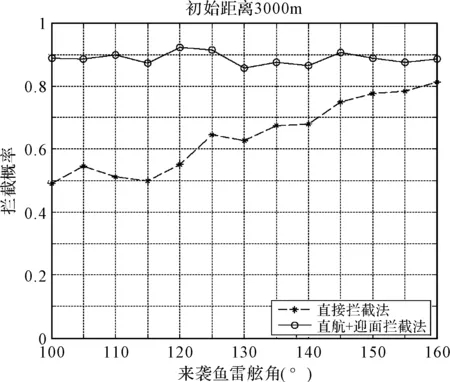
图6 两种拦截方法效果对比(初始距离3000m)
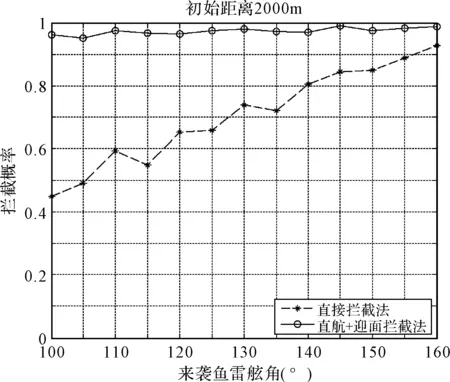
图7 两种拦截方法效果对比(初始距离2000m)
在典型报警舷角下,对ATT拦截效果进行了仿真,比较了直接拦截法与本文提出的直航+迎面拦截方法两者的效果。具体如图6和图7所示。
由图可知,本文提出的直航+迎面拦截法在各种舷角条件下均比直接拦截法的效果好。由于直航+迎面拦截法采用了首先直航以快速接近目标,接着旋回至来袭鱼雷航向的方法,既能尽早拦截鱼雷,又能尽量减少来袭鱼雷距离和航向误差的影响,因此该方法在不同来袭鱼雷舷角情况下的效果均较好。
5 结语
基于直航迎面拦截的反鱼雷鱼雷拦截弹道设计方法,通过ATT发射后通过直航快速接近目标航向线,然后旋回进行迎面拦截,提高了舰艇使用ATT拦截来袭鱼雷的效果,对提升舰艇生存能力具有重要意义。
参 考 文 献
[1] 王新华,杨迎化,衡辉等.反鱼雷鱼雷发展现状及作战使用[J].飞航导弹,2012(5):54-58.
[2] 崔贵平.国外反鱼雷鱼雷技术发展及趋势[J].舰船科学技术,2013,35(3):138-141.
[3] 钱东,张起.欧洲反鱼雷鱼雷研发展望[J].鱼雷技术, 2006,14(5):1-5.
[4] 由大德,徐德民.反鱼雷鱼雷拦截概率影响因素仿真分析[J].鱼雷技术,2010,18(4):312-315.
[5] 丁振东.反鱼雷鱼雷作战模式及拦截弹道初步研究[J].鱼雷技术,2004,12(1):13-15.
[6] 李晓宁,明星,朱若寒.反鱼雷鱼雷拦截弹道及拦截概率[J].鱼雷技术,2008,16(3):9-12.
[7] 王新宏,刘庆,刘建国.基于相遇区域的反鱼雷鱼雷拦截弹道[J].鱼雷技术,2013,8(4):241-245.
[8] 刘庆,王新宏,刘建国.反鱼雷鱼雷发射角的讨论[J].声学技术,2011,30(4):7-9.
[9] 张宇文.鱼雷弹道与弹道设计[M].西安:西北工业大学出版社,1999:35-37.
[10] 张冬兴,缪旭东,王春雨.水面舰艇反鱼雷鱼雷作战使用方法研究[J].舰船电子工程,2009,29(12):56-59.
[11] 陈春玉,张静远,王明洲,等.反鱼雷技术[M].北京:国防工业出版社,2006:161-162.
*收稿日期:2015年10月5日,修回日期:2015年11月26日
作者简介:于昌荣,男,硕士,工程师,研究方向:鱼雷防御和智能辅助决策。
中图分类号TJ630
DOI:10.3969/j.issn.1672-9730.2016.04.007
Design of Intercept Trajectory of Anti-Torpedo Torpedo Based on Direct and Converse
YU Changrong
(Jiangsu Automation Research Institute, Lianyungang222061)
AbstractBased on the analysis of three intercept trajectories of anti-torpedo torpedo (ATT), an approach to design a direct and converse intercept trajectory of anti-torpedo torpedo is given. By running directly close to target course line, then turning to intercept conversely, intercepting torpedo can not only be earlier but also reduce the impact of distance and course error, therefore the effect of anti-torpedo and the vessel’s survival ability is improved.
Key Wordsanti-torpedo torpedo (ATT), intercept trajectory, converse intercept
