
机械创新设计虚拟实验平台的建立
2016-08-08 03:46童小利金秋春
中国现代教育装备 2016年13期
童小利金秋春
1.郑州航空工业管理学院机电工程学院 河南郑州 450015 2.郑州航空工业管理学院计算机科学与应用学院 河南郑州 450015
现代教育技术与装备
机械创新设计虚拟实验平台的建立
童小利1金秋春2
1.郑州航空工业管理学院机电工程学院 河南郑州 450015 2.郑州航空工业管理学院计算机科学与应用学院 河南郑州 450015
摘 要:利用VC++,Pro/E及其二次开发软件Pro/toolkit设计出“零件库”和“机构库”并存的机械创新设计虚拟实验平台。提出了一种着眼于机构(组件)的整体结构规划与更新的“机构库”构建方法,可直接对机构进行参数的修改和更新、运动仿真分析,使得机构参数调整和运动分析变得更加简单。此外该方法为不同尺寸同类型的系列化产品开发提供了借鉴。
关键词:机械创新设计;虚拟实验平台;Pro/E;机构(组件)参数化
机械创新设计实验是一个综合设计性实验。传统的机械创新设计实验受设备数量和实验时间的影响,不可能让每个学生的创新设计的实验方案都能得以实现和完成。改善实验条件、改革实验教学方法、更新实验教学内容、提高实验教学的质量,把数字化、虚拟实验引入实验教学已成为一种必然的趋势[1]。虚拟仿真技术在机械工程实验教学中的应用,弥补了仪器设备不足的问题,使学生人人都可以参与,是对传统实验教学仪器设备的补充和扩展。
刘国亮等以UGNX软件为开发平台,利用VC++6.0面向对象的编程技术,在UG/OpenAPI开发平台上,建立了三维机械创新设计的构件库,实现参数化尺寸驱动[2]。朱汉松等运用Pro/E的二次开发工具Pro/toolkit建立了包含连杆、滑块、螺栓等零件的工具箱[3]。他们为机械创新设计创建了一个方便快捷的虚拟仿真实验平台,他们的实验平台只是针对单个零件进行了参数化的设计,并建立了由参数化零件组成的零件库,在对机构进行运动参数修改时需要回到零件的层面修改零件参数。本文主要研究了不仅针对零件而且针对机构建立了零件库和常用机构库并存的虚拟实验平台,该虚拟实验平台既可以利用“零件库”进行机构的搭接,也可直接调用“机构库”里的机构,直接对机构进行运动参数的修改、更新以及运动仿真分析,使得参数调整和运动分析得以简化。方便学生以机构为单位进行机械创新实验,大大降低了实验的难度,节省了实验的时间,可使学生把注意力更多地放在机构本身的机构组成原理及运动特性分析上。
1 参数模型化设计
参数化设计是一种使用重要几何参数快速构造和修改几何模型的造型方法,采用参数化模型通过调整参数来修改和控制几何形状[4]。参数化设计可以大大提高模型的生成和修改的速度,在产品的系列设计、相似设计及专用CAD系统开发方面具有较大的应用价值。
PRO/ENGINEER具有强大的设计、分析、制造功能,为用户提供了多种二次开发工具。常用的二次开发工具有:族表(Family Table)、用户定义特征(UDF)、Pro/Program、J-link、Pro/toolkit等[5]。故采用Pro/Engineer软件进行零件和机构模型的参数化的设计。
1.1零件参数化设计
零件参数化的设计首先要根据设计要求,确定所设计的零件的模型几何结构约束关系、驱动尺寸以及非驱动尺寸与驱动尺寸之间的关系。其中关系包括用数值约束关系和结构约束关系两种。数值约束关系是指各参数间一定的数值关系(如等式关系d0=d1+10、不等式关系d0+d1>d2+d3或条件关系IF(d0+1)>=d1)。确定完零件的驱动尺寸和关系后,通过“参数”创建驱动参数,该参数值可以修改。然后通过“关系”创建非驱动尺寸的数值约束关系,最后将各驱动和非驱动参数同模型尺寸关联起来。为了后面实现机构参数化,建立零件参数和机构参数之间的联系,还需要利用“程序”即Pro/Program中的Input段进行设置以驱动用参数命名的变量名。按照此方法建立了零件库中的零件,包括连杆、螺母、螺栓、直齿轮、齿条、传动轴、链轮、凸轮、滑动杆等零件参数化建模。
下面以连杆模型创建为例,详细零件参数化设计的详细过程。
1.1.1连杆数学模型的建立
连杆数学模型的建立,主要是确定驱动尺寸以及数值约束关系。在分析连杆模型(如图1所示)的特点,确定连杆有两个驱动尺寸:一个是孔的直径Φd2大小,一个是孔间距d1。数值约束关系有:d3=2×d2,d0=0.5×d2。

图1 连杆模型
1.1.2建立连杆零件驱动参数
打开Pro/Engineer实体建模环境,新建一个名为liangan.prt的零件。在Pro/E菜单栏下,选择【工具】-【参数】命令,在弹出的对话框中定义所创建特征的参数D和L(如图2所示),其中D为孔的直径,L为孔间距。

图2 连杆参数的建立
1.1.3建立三维模型
按照常规建模方法—创建草图、创建特征来创建连杆模型,所创建的连杆模型如图1所示。
1.1.4建立连杆零件各尺寸、参数之间的关系
在菜单栏里选择【工具】-【关系】命令,在弹出对话框中设置参数之间关系(如图3所示),图中d0,d1,d2,d3为创建连杆零件时系统自动分配的尺寸名称,D,L为上步定义的驱动参数名,图3中等式d2=D,d1=L 将图1中的模型的驱动尺寸d1,d2同图2中所建立的驱动参数D,L相联系起来。

图3 连杆关系的建立
1.1.5连杆Pro/Program程序的建立
在菜单栏里选择【工具】-【程序】命令,选择菜单管理器的“编辑设计”,打开程序,在记事本文件中的INPUT参数声明区中定义孔中心距L为可输入参数,其程序如图4所示。
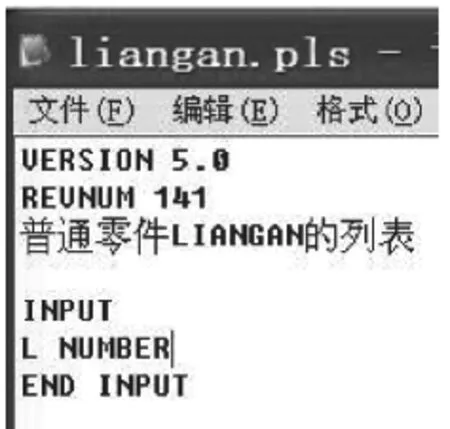
图4 连杆程序设计
1.2机构参数化设计
Program模块具有将Pro/Engineer软件的模型树(modeltree)中每个特征的详细信息记录下来的特点,使用时不必也不需要重新撰写设计步骤,只需几个相关语法指令就可以让整个零件或组件变得弹性化与多样化,它使用简单、灵活,可以方便地进行零件的参数化设计和造型[6]。机构的参数化设计是建立在零件参数化设计的基础上的。利用上述建立好的参数化零件搭建所要设计的机构的装配模型,然后利用Pro/ Program编程建实现通过机构装配模型向其零件模型进行参数传递,对零件的形状和尺寸进行控制,从而实现了通过机构的参数来控制整个机构的运动尺寸。
下面以一个摆动导杆—双摇杆机构的参数化设计为例详细介绍机构(组件)的参数化设计过程。
1.2.1摆动导杆—双摇杆机构分析

图5 摆动导杆-双摇杆机构运动简图
摆动导杆—双摇杆机构(如图5所示)由曲柄导杆机构和双摇杆机构构成,杆1、滑块2和导杆3和机架6构成曲柄导杆机构,导杆3、滑块2以及摇杆5组成双摇杆机构,该机构是由曲柄导杆机构和双摇杆机构串联组合而成的。曲柄1为主动件,以角速度ω1=30转/分匀速转动,构件1,AC,CF、构件4,5尺寸均可在允许范围内调整。测试参数:摆杆5的角位移、角速度和角加速度。曲柄1可由零件库里的齿轮构成,滑块2的铰链拼装在齿轮上不在回转轴线的孔中。
1.2.2创建摆动导杆—双摇杆机构
打开Pro/Engineer实体建模环境,新建一个名为baidongdaoganshuangyaogan.asm的组件。然后将第一步创建的参数化零件齿轮(杆1)、滑动杆(杆3)、连杆(杆4、杆5)和销钉等装配到组件中,创建的机构如图6所示。

图6 摆动导杆—双摇杆机构模型
注意为方便参数的传递杆4和杆5由连杆零件liangan.prt另存为两不同的文件名liangan4.prt,liangan5.prt。
1.2.3 导杆—双摇杆机构程序设计
机构(即组件)参数化设计是通过Program模块中的Execute……End Execute来实现的。这个语句只用于组件中,它的作用是从组件向零件传递参数,以通过组件中的某些参数去控制构成组件的零件的形状或尺寸。该语句段,第一行是Execute,最后一行是End Execute,中间的每一行是一个赋值语句。
这样,再生时给变量输入新值,零件(part)的形状或尺寸就可以自动按要求变化。
因为导杆—双摇杆机构程序设计机构中包含的零件很多,不能将组件参数向零件参数一一列举出来,特选组件参数向连杆4传递的程序的编写,如下所示。
在导杆—双摇杆机构菜单栏里选择【工具】-【程序】命令,选择菜单管理器的“编辑设计”,打开程序,在INPUT……END INPUT语句中添加如下程序
INPUT
L4 NUMBER
"添加杆件4在导杆—双摇杆机构中的变量名"
END INPUT
并在Add Part liangan4 ……End Add前添加以下语句:
Execute
L=L4
End Execute
1.2.4机构运动仿真
2 机械创新设计实验平台的建立
利用VC++创建用户界面,通过Pro/E二次开发工具Pro/toolkit创建嵌套于Pro/E的“机械创新设计实验”用户菜单及其下拉菜单,并将零件或机构参数输入用户界面传递到Pro/E模型中,利用Pro/toolkit进行零件或机构模型参数检索和参数更新编程流程如图7所示。先编写了机械创新设计实验的资源文件以及对话框的资源文件,后编写了在Pro/E下注册及运行文件(dlgtest_PROTK.DAT)。

图7 零件或机构模型参数检索和参数更新流程图
3 机械创新设计实验平台的使用
3.1机械创新设计实验平台的注册
点击Pro/E菜单【工具】—【辅助应用程序】,在弹出的对话框中点击注册并选择选择dlgtest_PROTK. DAT文件进行注册并运行,则会在Pro/E菜单栏中添加一个【机械创新设计实验平台】菜单(如图8所示)。

图8 机械创新设计实验菜单
3.2零件库的使用
点击【机械创新设计实验平台】—【零件库】—【连杆】,则会弹出如图9的对话框,在对话框中输入参数,点击“更新模型”按钮则会自动生成连杆模型。在对话框中输入不同参数则生成不同尺寸的连杆模型。

图9 连杆参数输入对话框
3.3机构库的使用
点击菜单栏的【机械创新设计实验】—【机构】—【摆动导杆—双摇杆机构】,就会弹出如图10所示的导杆—双摇杆机构参数输入对话框,通过对话框输入机构参数,点击“更新”按钮可生成不同尺寸的导杆—双摇杆机构,同时该机构还保留了前面对机构进行运动分析的各项设置,可直接在运动仿真模块下对机构执行运动分析并查看测量结果。
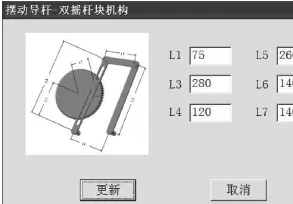
图10 摆动导杆—双摇杆机构参数输入对话框
4 结束语
利用Pro/E以及二次开发工具Pro/toolkit开发出了集零件库、机构库以及机构动画于一体的机械创新设计虚拟实验平台,为学生在自己的计算机上随时随地进行创新设计提供了一个虚拟的实验平台。特别是机构库着眼于整体产品结构的规划与更新,可以直接对机构尺寸进行修改,避免了装配关系遭到破坏、零件再生而产生特征失败等问题,而且还保留机构的运动仿真的各项设置,可直对机构接进行运动分析并查看测量结果,省去了重新装配和运动分析定义工作。此外,机构库的建立方法可为不同尺寸的系列化产品的开发提供了一个简单方便、可视化的设计方法。
参考文献
[1] 谢晓文,郑蓓蓉.基于慧鱼模型的机械产品数字化设计实验虚拟实验室的建设[J].实验室研究与探索,2012,31(3):156-181.
[2] 刘国亮,张兰,赖家美.基于UGNX的机械创新设计软件平台的建立[J].南昌工程学院学报,2008,27(3):60-63.
[3] 朱汉松,何竟飞.基于PRO/E的机构运动创新设计[J].实验室研究与探索,2006,251(3):284-286.
[4] 韩敏,孙苏榕.基于Pro/Toolkit的纺丝头组件的参数化设[J],机电工程技术,2006,35(11):75-77.
[5] 曹云鹏.基于Pro/E二次开发技术的凸轮零件设计[D].保定:华北电力大学,2006.
[6] 李世国.Pro/TOOLKIT程序设计[M].北京:机械工业出版社,2003.
收稿日期:2016-01-20
作者简介:童小利,硕士,讲师。
基金项目:郑州航空工业管理学院教育科学研究基金项目(编号:zhjy13-05)。
Building of Virtual Experiment Platform for Mechanical Innovative Design
Tong Xiaoli1, Jin Qiuchun2
1.School of Mechatronics Engineering, Zhengzhou University of Aeronautics, Zhengzhou, 450015,China 2.School of Computer Science and Application, Zhengzhou University of Aeronautics, Zhengzhou, 450015, China
Abstract:A virtual experiment platform for mechanical innovative design was built with component databases and mechanism databases by software VC++ and Pro/toolkit. A build method was proposed keeping the focus on the overall structure plan and updating of mechanism databases. The method could modify and update the parameters and could simulate directly for mechanism, so it was become simply that parameters were modifed and mechanism was simulated. Moreover, the method provided a reference for series products with Different size but with the same type.
Key words:mechanical innovative design; virtual experiment platform; Pro/E; mechanism or component parameter
猜你喜欢
能源工程(2022年2期)2022-05-23
重型机械(2020年2期)2020-07-24
装备制造技术(2019年12期)2019-12-25
中国科技纵横(2017年1期)2017-03-10
股市动态分析(2016年23期)2016-12-27
汽车科技(2016年6期)2016-12-19
股市动态分析(2016年7期)2016-09-29
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年29期)2016-08-04
太阳能(2015年11期)2015-04-10
