
模糊PID算法在数字化棒控系统中的应用
2016-08-06 02:33贺新杨锴
自动化仪表 2016年7期
贺 新 杨 锴
(上海交通大学电子信息与电气工程学院1,上海 200240;上海工业自动化仪表研究院2, 上海 200233)
模糊PID算法在数字化棒控系统中的应用
贺新1杨锴2
(上海交通大学电子信息与电气工程学院1,上海200240;上海工业自动化仪表研究院2, 上海200233)
摘要:数字化棒控系统是核电站控制系统的重要组成部分。在冷态工况和热态工况下,温度的变化会导致驱动机构的参数发生变化,这将最终影响棒控系统的控制性能。研究了现有棒控系统,归纳总结了数字化棒控系统在核电站控制过程中所参与的三个控制回路,并对受温度影响最大的电流控制回路进行Matlab仿真。为解决温度对控制回路的影响,引入了模糊PID算法并加以改进,通过算法仿真进行验证。仿真验证了模糊PID在数字化棒控系统中的可用性。
关键词:核电站数字化棒控系统传感器控制系统控制回路驱动机构模糊PID算法三相半波整流
0引言
数字化棒控系统主要通过调节供给驱动机构的电流来实现移动控制棒的目的,是核电站控制系统的重要组成部分。随着时代的进步,棒控系统已完成从模拟技术向数字技术的转变[1],这就解决了原系统中信号通信不便、系统繁杂、不易维护等缺点,并提高了棒控系统的可用性和可靠性[2]。但是在实际应用过程中,并没有给出棒控系统的物理模型,且在现场调试过程中总要进行冷态参数调整和热态参数调整等多次现场调试[3],增加了调试困难。本文针对该问题进行了探讨。
1控制回路
在电站模型中,数字化棒控系统主要参与电流控制。本文对现有核电站中的棒控系统进行归纳总结,最终推理得出数字化棒控系统所参与的三种控制回路。
数字化棒控系统[4]的核心是电流控制回路,目前核电站采用的电流控制回路如图1所示。将逻辑指令生成的模板电流作为输入、霍尔传感器采样的电流作为反馈,通过控制算法(多为PID算法)计算出控制导通角,最终通过调节机构完成对电流的控制,实现对步动作的控制。
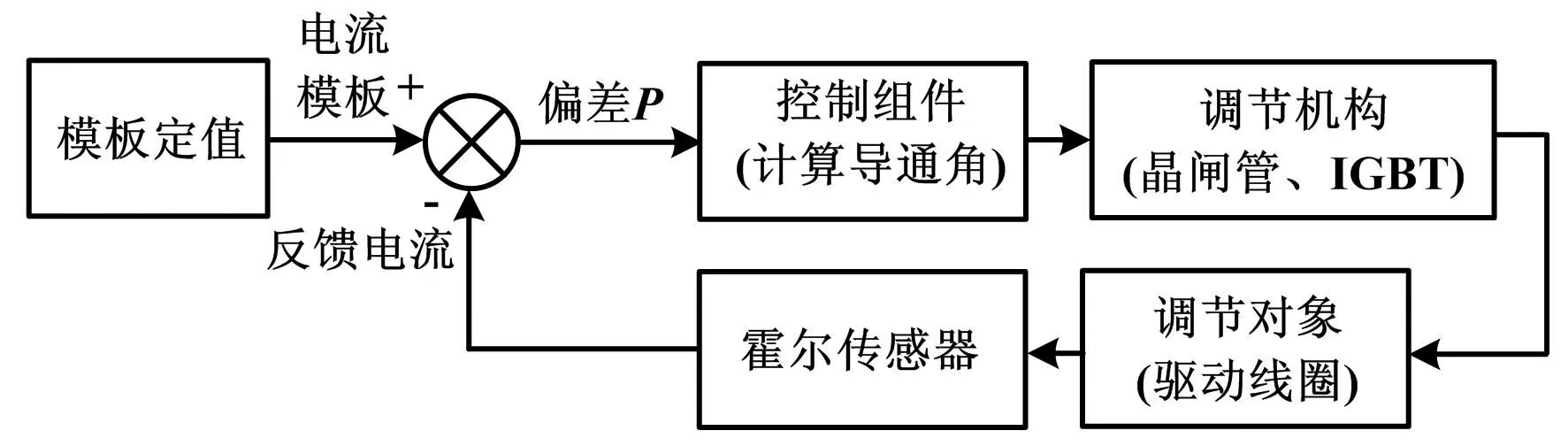
图1 电流控制回路Fig.1 Current controlloop
除电流控制回路之外,数字化棒控系统也参与核电站的两大控制回路。温度控制回路是一个闭环回路,如图2所示。其根据平均温度设置点和反馈温度的偏差,通过电站控制系统计算后向数字化棒控系统发送方向和速度指令,并移动控制棒来实现对核电站回路中温度的控制。功率控制回路也是一个典型的负反馈回路,对核电站的功率定值和反馈值求差并发送给电站控制系统。功率控制回路如图3所示。同时,根据控制棒的位置信息,电站控制系统会输出相应的方向和速度指令,数字化棒控系统将根据这些指令完成控制棒的移动控制,最终实现对反应堆功率的控制。

图2 温度控制回路Fig.2 Temperature controlloop
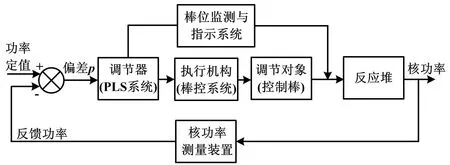
图3 功率控制回路Fig.3 Power controlloop
2算法仿真
数字化棒控系统中的电流控制多采用PID算法[5],而在之前的工程应用中,工程师必须将棒控系统连接至真实的驱动机构后,才能进行PID参数的整定,这就增加了现场操作的难度,并且会耗费很长时间,严重时甚至会拖延工期。为了避免这种情况发生,可以对算法进行仿真,调试出大致的PID参数,为以后工程应用提供参考。秦山核电站的电流调节原理图如图4所示。

图4 电流调节原理图Fig.4 Current regulation principle
控制组件根据偏差P产生晶闸管的触发角度,过零检测电路可以准确地判断触发起始点。从该点开始计时,当到达相应的触发角度时,控制组件会向调节机构发送一个脉冲信号来导通晶闸管,从而完成对电流的控制。根据该原理[6],可以通过Matlab建立一个仿真模型[7],如图5所示。

图5 算法仿真模型Fig.5 Algorithm simulation model
3算法的不足
在电流控制回路中,数字化棒控系统的最终负载为驱动线圈。该线圈相当于一个电阻和电感的串联。由于阻性负载会随温度的变化而发生较大的变化,这将影响控制的性能,因此在现场调试过程中要进行冷态调试和热态调试等多次调试。一组提升线圈在不同温度下的电阻值和电感值如表1所示。

表1 电阻和电感变化表Tab.1 Variation of resistance and inductance
由表1可以看出,电阻在200 ℃时的阻值是在0 ℃时的1.85倍。通过算法仿真模型进行算法验证,先设置电阻电感值为0 ℃时的数值,在经过PID参数整定后,将电阻电感值改为200 ℃时的数值,并进行仿真。仿真发现稳态误差明显增大,严重时,该处电流可能会由于下降过多而无法控制驱动机构。重新整定PID参数,待系统平稳后,再将电阻电感值改为0 ℃时的数值并仿真,可以发现超调量将会超出要求。通过上述仿真可知,不同温度下的PID参数是不能通用的,因此,在工程应用中,需要分别在冷态和热态情况下对PID参数进行整定。这就加重了调试的工作量,也增加了在核电站运行过程中因温度变化造成的棒控系统风险。
4算法改进
稳态误差随温度上升变化曲线和超调量随温度下降变化曲线分别如图6和图7所示。
为了解决温度对棒控系统的影响,本文将引入模糊PID控制器,根据温度的变化来实时地进行PID参数整定,从而使棒控系统在核电站运行过程中不会因环境温度的变化而导致控制性能的下降。
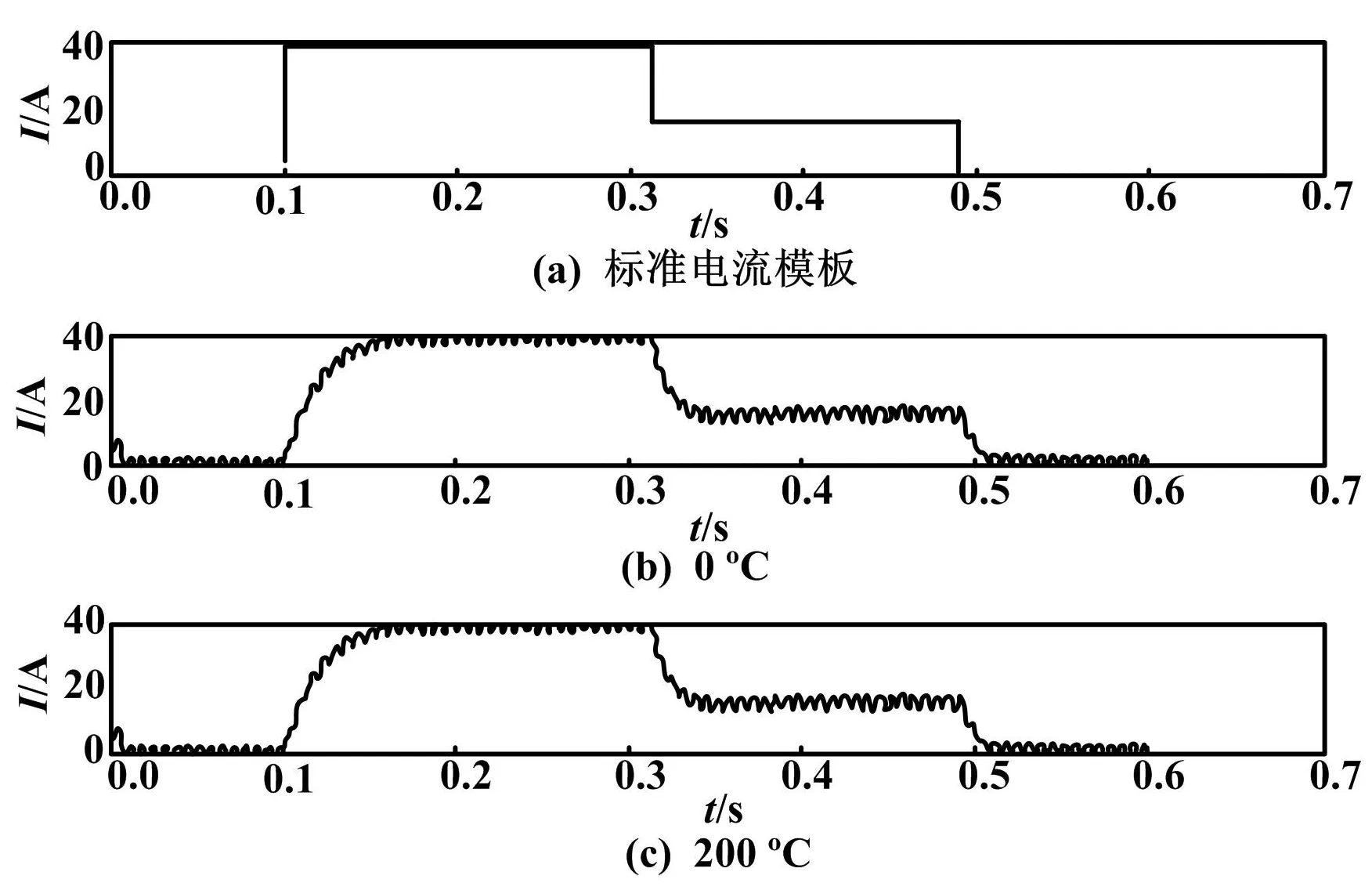
图6 稳态误差随温度上升变化曲线Fig.6 Curves of the change of steady state error as the temperature rises

图7 超调量随温度下降变化曲线Fig.7 Curves of the change of overshoot as the temperature decreases
模糊控制器取温度变量作为输入,根据电阻值随温度变化的函数设置三组隶属度函数,并根据多次
PID仿真结果设置模糊控制规则,将温度信息变成需要的P、I、D参数。此时,这些参数将会随温度的变化而发生变化,最终完成控制性能的优化。将模糊控制器加入到Matlab仿真中,并添加温度信号作为一个新的反馈量;通过仿真发现,在0 ℃和200 ℃两种情况下,经模糊PID控制器进行整流的电流波形与模板电流几乎一致。
5结束语
通过上述仿真验证结果可以判断,引入模糊PID算法,能够降低数字化棒控系统因温度变化而产生的稳态误差和过度超调量。而在实际核电站中,驱动机构附近的温度是可测的,因此只要将此温度信号反馈给数字化棒控系统,并使用模糊PID算法进行PID参数整定,便能够实现棒控系统在冷态工况和热态工况下的自动控制。这将缩减现场工程人员进行PID参数调节的工作量,也将减少驱动机构因输出电流波形不标准而产生的损耗,同时也提升了棒控系统在全电站运行情况下的可靠性和安全性。
参考文献:
[1] 李涛,许育周,王春生,等.棒控棒位系统数字化设计[J].核科学与工程,2014,34(1):73-79.
[2] 刘冲,周剑良.核电站反应堆棒控棒位系统数字化改造设计及其可靠性预测[J].电气自动化,2010,32(2):54-56,78.
[3] 黄勇,刘冲.红沿河核电站3&4号机组RGL电源柜的设计与调试[J].电子技术,2012(1):36-38.
[4] 王萍.数字化的反应堆棒控系统研究[D].保定:华北电力大学,2011.
[5] 唐静.智能PID控制器的参数整定及实现[D].合肥:安徽理工大学,2012.
[6] 钟颖,荣军,朱莉波,等.基于MATLAB的三相半波可控整流电路的仿真研究[J].电子技术,2015(2):16-20.
[7] 马军.基于Matlab的整流电路仿真研究[J].价值工程,2013(23):65-65,66.
中图分类号:TH-39;TP273+.4
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201607017
Application of the Fuzzy PID Algorithm in Digitized Rod Control System
Abstract:Digitized rod control system (DRCS) is an important part of control system nuclear power plant.Control performance would be changed because the parameters of drive mechanism are affected by the temperature variation of the cold conditions and hot conditions of the unit.The existing rod control systems are researched,three of the control loops that DRCS involves in process of NPP are summarized,and the current control loop which is mostly affected by temperature is simulated with Matlab.To solve the influence of temperature on the control loop,the fuzzy PID algorithm is introduced and improved,and it is verified by algorithm simulation.The simulation verifies the availability of fuzzy PID algorithm in DRCS.
Keywords:Nuclear power plantDigitized rod control systemSensorControl systemControl loopDrive mechanismFuzzy PID algorithmThree-phase half-wave rectification
修改稿收到日期:2015-11-16。
第一作者贺新(1987— ),男,现为上海交通大学工业自动化专业在读硕士研究生;主要从事数字化棒控棒位系统的研究。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
飞碟探索(2022年2期)2022-05-31
家庭影院技术(2021年3期)2021-05-21
铁道通信信号(2020年5期)2020-09-21
科技传播(2019年22期)2020-01-14
小哥白尼·趣味科学画报(2019年12期)2019-02-28
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
电子制作(2018年1期)2018-04-04
中国核电(2017年2期)2017-08-11
