基于Trucksim的半挂汽车列车方向盘角阶跃输入工况仿真试验研究
2016-08-02 06:31龙佳庆韦超毅
广西科技师范学院学报 2016年3期
龙佳庆,韦超毅
(1.柳州职业技术学院,广西柳州 545006;2.广西大学,广西南宁 530004)
基于Trucksim的半挂汽车列车方向盘角阶跃输入工况仿真试验研究
龙佳庆1,2,韦超毅2
(1.柳州职业技术学院,广西柳州545006;2.广西大学,广西南宁530004)
摘要:通过TruckSim软件建立半挂汽车列车整车仿真模型,进行方向盘角阶跃输入仿真试验,通过改变牵引车及挂车的参数,以研究不同参数对操纵稳定性的影响.试验表明:适当的增加牵引车的质量、加长牵引车轴距、加长挂车车轴距牵引车前轴的距离,降低挂车质量、缩短牵引车铰接点到前轮的距离能有效提高半挂汽车列车操纵稳定性.
关键词:半挂汽车列车;TruckSim软件;方向盘角阶跃输入试验;操纵稳定性
0 引言
半挂汽车列车是由牵引车与半挂车组合在一起的,牵引车提供动力,挂车承载货物,牵引车起到带动挂车行驶的作用,与其他车辆不同的是,车辆单元之间相互作用会影响半挂汽车列车的整车操纵稳定性[1].半挂汽车列车具有纵向尺寸长、轮距小、整车质心高、载重量大的特点,在行驶过程中,其操纵稳定性极限较低.
因此,对半挂汽车列车进行极限工况下实车试验时,有非常大的局限性和危险性,采用虚拟仿真技术对半挂汽车列车进行研究,可以得到一些在实车试验中无法测量,又能评价其操纵稳定性的重要指标[2-4].
1 半挂汽车列车整车建模
在Trucksim软件中,构建集整车外形,转向、动力传动、制动系和行驶系三大部分组成整车动力学模型,结合半挂汽车列车的操纵稳定性的试验方法,设置环境参数和路面参数.
2 仿真试验方法
通过TruckSim软件建立半挂汽车列车仿真模型,模拟不同的车速,以一定的方向盘转角进入弯道时,会产生的状况.仿真试验车辆使用的主要参数如表1,通过进行方向盘角阶跃输入工况试验,生成各个工况下的评价指标曲线图,然后分析不同车速下半挂汽车列车的操纵稳定性.
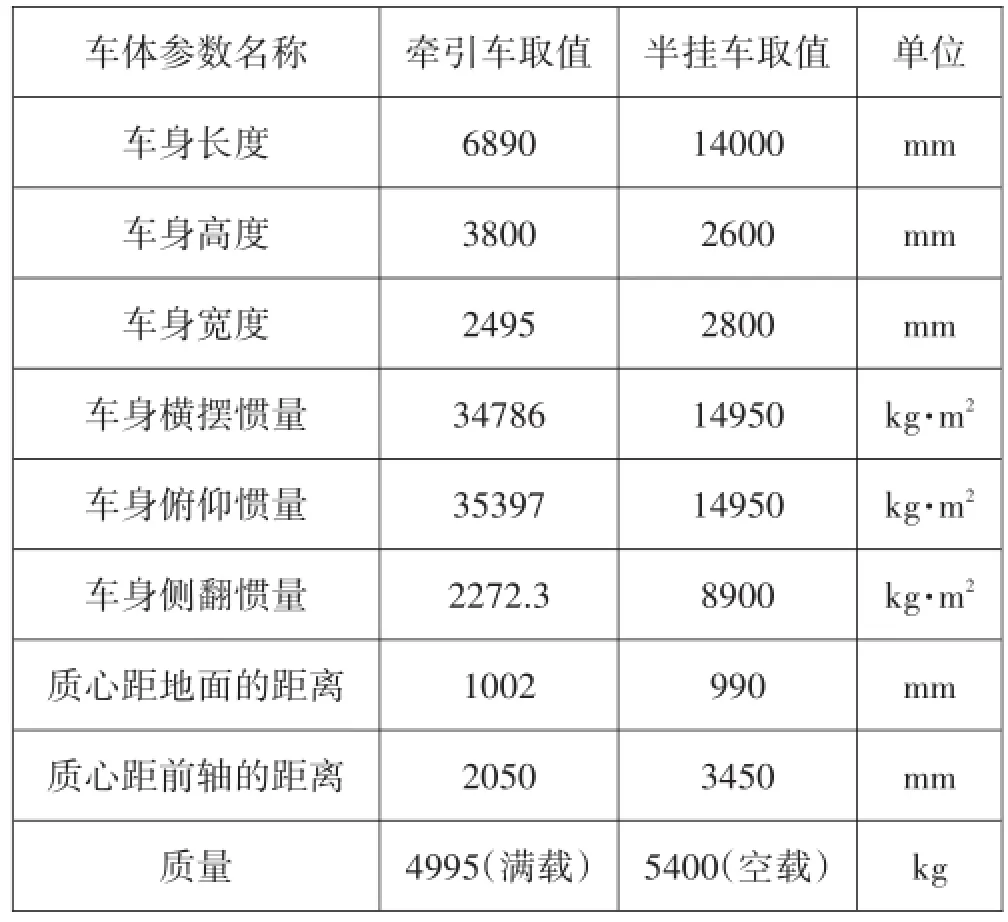
表1 主要车体参数的组成
根据GB/T 12534汽车道路试验方法通则、GB/T 12549汽车操纵稳定性术语及其定义、GB/T 13047汽车操纵稳定性指标限值与评价方法三个标准的规定,并考虑实车具体情况,设定方向盘角阶跃输入试验的仿真条件为:在试验过程中没有制动操纵,只有转向操作;试验的初速度分别取用60km/h、65km/h、70km/h、75km/h四种不同速度;方向盘转角为120°,时间15s.其方向盘转角阶跃输入与时间的关系如图1所示,刚开始是直线行驶,5s时刻开始对车辆实施方向盘角阶跃输入,模拟汽车由直线行驶至5s时进入弯道.
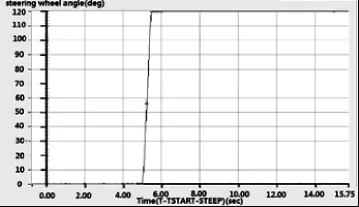
图1 方向盘角阶跃输入曲线
3 仿真结果分析
牵引车和挂车在方向盘角阶跃输入试验过程中的横摆角速度、侧向加速度、侧倾角与时间的关系曲线如图2、3、4所示(说明:Unit1表示牵引车质心,Unit2表示半挂车质心).
图2为不同的车速下牵引车和挂车的横摆角速度变化对比曲线图,靠前一组曲线是牵引车的,靠后的一组曲线是挂车的,牵引车的横摆角速度响应时间和横摆角速度峰值响应时间均小于挂车的,这说明挂车的横摆角速度响应滞后于牵引车;同时随着速度增加,牵引车和挂车的横摆角速度峰值增大,震荡变大,车辆进入稳态所需时间变长,反应时间也变长,当车速为65km/h时,震荡明显,当车速为75km/h时,震荡变得剧烈已经无法达到稳态.说明随着车速的增加,半挂汽车列车的操纵稳定性有所下降.
图3为不同的车速下牵引车和挂车的侧向加速度对比曲线图,当速度分别为60km/h、65km/h、70 km/ h和75km/h时,随着车速的增加,牵引车和挂车的侧向加速度峰值不断增大,振荡变大,当车速为70km/h时,震荡明显,无法达到稳态.由此可见,速度对侧向加速度有明显影响.
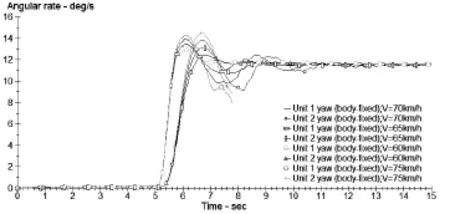
图2 横摆角速度对比曲线
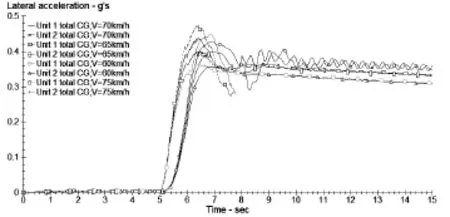
图3 侧向加速度对比曲线
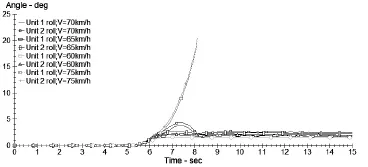
图4 侧倾角对比曲线
图4为不同的车速下牵引车和挂车的侧倾角变化对比曲线图,当速度分别为60km/h、65km/h、70 km/h 和75km/h时,牵引车的侧倾角和挂车侧倾角都随车速增加而变大,而且挂车的侧倾角大于牵引车的侧倾角,说明速度达到极限时,挂车更容易侧翻.并且在车速小于70km/h时仍能保持侧倾稳定性;当车速超过70km/h,达到75km/h时,车辆侧倾角已经急剧增大而发散,出现侧翻现象.
4 不同结构参数对半挂汽车列车方向盘角阶跃输入试验的影响
采用上述的方向盘角阶跃输入响应试验,在同样的车速下,分别改变牵引车的轴距、牵引车铰接点到前轮的距离、挂车车轴距前轮的距离,以研究其对方向盘角阶跃输入工况下的横摆角速度、侧向加速度以及侧倾角等操纵稳定性指标的影响;在上一节中方向盘角阶跃输入试验中,在试验车辆的固定参数下,车速超过70km/h已出现危险工况,因此为了更好的验证各参数的改变对操纵稳定性的影响,本节试验所选取的速度为75km/h.
4.1质量的影响
分别改变牵引车质量和挂车质量,进行方向盘角阶跃输入响应试验,其他仿真试验条件与原始试验一致.
首先,保持挂车质量不变,只改变牵引车质量,分别为4500kg、6500kg、8500kg,通过方向盘角阶跃输入试验得到仿真试验结果曲线进行对比,分析牵引车质量对半挂汽车列车操纵稳定性的影响.其仿真结果曲线如图5、图6、图7所示(说明:Unit1表示牵引车质心,Unit2表示挂车质心).
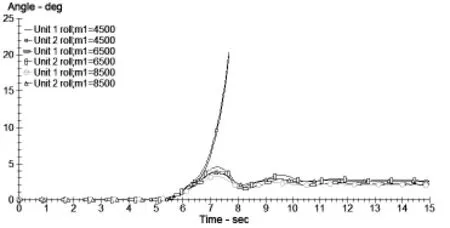
图5 侧倾角对比曲线
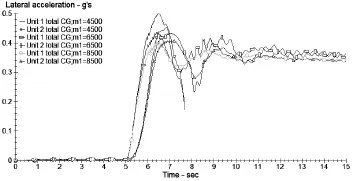
图6 侧向加速度对比曲线
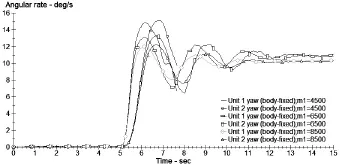
图7 横摆角速度对比曲线
从图5、图6、图7可以看出,在方向盘角阶跃输入工况试验下,当牵引车质量为4500kg时,侧倾角突增,车辆已经发生侧翻,质量在6500kg和8500kg时,侧倾角曲线变化比较平缓,可见牵引车质量增加,侧倾角有所下降,侧向加速度振荡变缓,这说明牵引车质量的适当增加,可以有效防止车辆侧翻,达到提高半挂汽车列车操纵稳定性的目的.而且随着牵引车质量增加,侧向加速度、横摆角速度峰值都有所减小,曲线更趋于平缓,说明牵引车质量增加,表现出较好的侧向加速度、横摆角速度响应特性,也说明操纵稳定性得到了一定程度的提高.
另外,保持牵引车的质量不变,只改变挂车质量,分别设为15000kg、18000kg、22000kg,通过仿真试验结果曲线进行对比,分析牵引车质量对操纵稳定性的影响.其仿真结果曲线如图8、图9、图10所示(说明:Unit1表示牵引车质心,Unit2表示挂车质心).
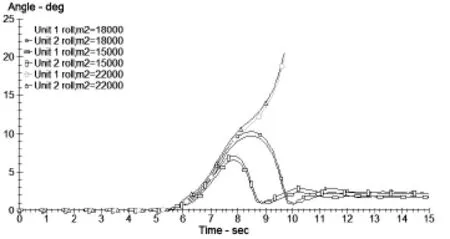
图8 侧倾角对比曲线

图9 侧向加速度对比曲线
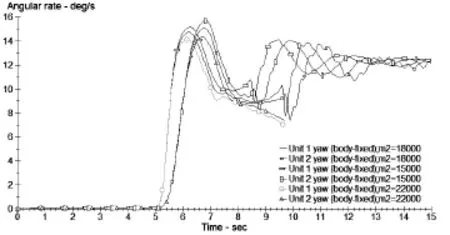
图10 横摆角速度对比曲线
从图8、图9、图10可以看出,在方向盘角阶跃输入工况试验下,挂车质量从15000kg增加到22000kg.随着挂车质量的增加,侧倾角有所增大,特别当挂车质量为22000kg时,侧倾角突然急剧增大,无法达到稳态,车辆已经发生侧翻.这说明挂车质量的增加,会降低车辆的侧翻极限,而更容易发生侧翻.而且随着挂车质量增加,侧向加速度、横摆角速度的曲线振幅变化增加,达到稳态时间变长,说明挂车质量增加,表现出更差的横摆角速度、侧向加速度响应特性,也一定程度说明挂车质量的增加降低了车辆的操纵稳定性.
4.2牵引车的轴距的影响
分别设定第二轴到第一轴的距离为3.5m、4m、4.5m,第三轴到第一轴的距离为4.5m、5m、5.5m,其他仿真试验条件与原始试验所述一致,通过方向盘角阶跃输入响应试验得到仿真试验结果曲线进行对比,分析牵引车轴距的影响.
仿真试验结果如图11、图12和图13所示(说明:Unit1表示牵引车质心,Unit2表示半挂车质心).
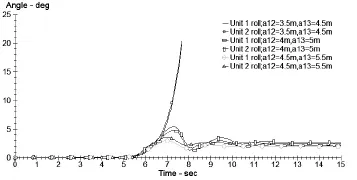
图11 侧倾角对比曲线
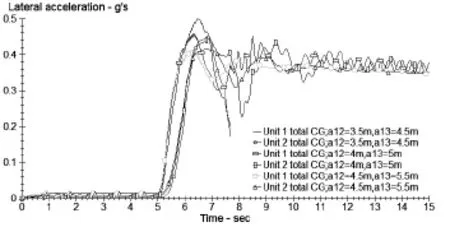
图12 侧向加速度对比曲线
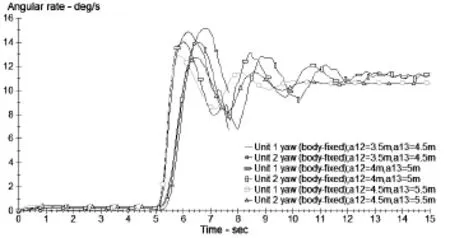
图13 横摆角速度对比曲线
从图11、图12和图13可以看出,在方向盘角阶跃输入工况试验中,随着牵引车轴距的加长,侧向加速度峰值、横摆角速度峰值、侧倾角峰值都在减小,而且振荡也减小,曲线趋于平稳,表现出更好的侧向加速度、横摆角速度以及侧倾角的响应特性,特别的,从图11中,当牵引车轴距小于4m时,车辆的侧倾角陡增,已发生侧翻,说明牵引车轴距的适当加长可以提高车辆侧翻极限,其轴距的加长在一定程度上能提高车辆的操纵稳定性.
4.3牵引车铰接点到前轴距离的影响
分别设定仿真车辆牵引车其第二轴至前轴的距离为3.5m,第三轴至前轴距离为4.77m,只改变牵引车铰接点到前轴的距离,记为L1,分别设定为3.5m、4m、4.5m,其他仿真试验条件与原始试验所述一致,使用TruckSim软件对其进行方向盘角阶跃输入响应试验.
通过实验得到牵引车不同铰接点到前轴的距离下的仿真结果(说明:Unit1表示牵引车质心,Unit2表示半挂车质心),试验结果曲线对比图如图14、图15、图16所示.
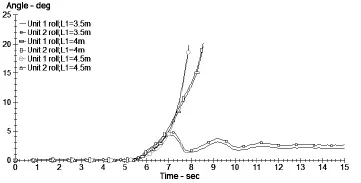
图14 侧倾角对比曲线
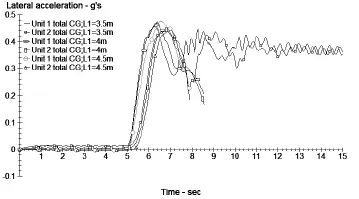
图15 侧向加速度对比曲线
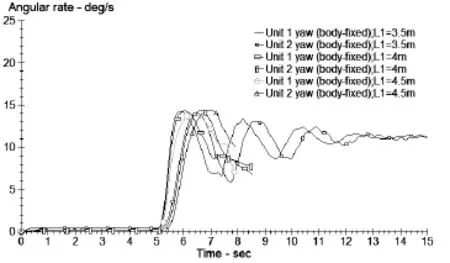
图16 横摆角速度对比曲线
从图14、图15和图16可以看出,在方向盘角阶跃输入工况试验中,随着牵引车铰接点到前轴距离的增加,虽然响应时间减小,但侧向加速度峰值、横摆角速度峰值、侧倾角峰值都在增大,表现出更差的侧向加速度、横摆角速度以及侧倾角的响应特性,而且,在图14中,当其距离在3.5m时,表现出很好的操纵稳定性;当距离超过3.5m时,车辆已发生侧翻,这说明,适当缩短牵引车铰接点到前轴距离能提高车辆的侧翻极限,在一定程度上能提高车辆的操纵稳定性.
4.4挂车车轴距牵引车前轴距离的影响
分别设定不同挂车车轴距牵引车前轴的距离,其他仿真试验条件与原始试验一致,使用TruckSim软件对其进行方向盘角阶跃输入响应试验.
设定挂车第一轴到牵引车前轴的距离记为A1,分别取值6.5m、7m、7.5m;第二轴距其距离记为A2,分别取值7m、8.2m、9.4m;第三轴距其距离为A3,分别取值7.5m、8.7m、9.9m.仿真试验结果如图17、图18、图19所示.(说明:Unit1表示牵引车质心,Unit2表示半挂车质心)
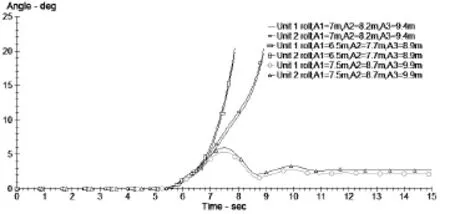
图17 侧倾角对比曲线
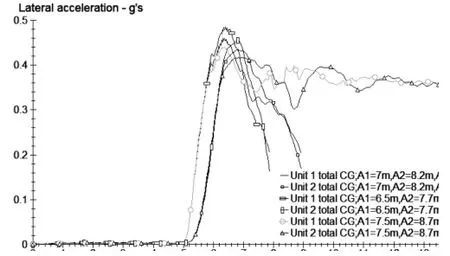
图18 侧向加速度对比曲线
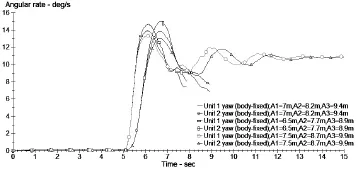
图19 横摆角速度对比曲线
从图17、图18、图19可以看出,在方向盘角阶跃输入工况试验下,当挂车车轴距牵引车前轴的距离加长时,侧倾角有所减少,特别当挂车第一轴距牵引车前轴为7.5m时,车辆没有发生侧翻,而其距离在6.5m 和7.0m时,其侧倾角突增,使车辆发生侧翻,这说明挂车车轴距牵引车前轴的距离加长表现出更好的侧倾极限,适当的加长距离值可以有效防止车辆侧翻,达到提高半挂汽车列车操纵稳定性的目的.而且随着距离加长,横摆角速度、侧向加速度峰值都有所减小,曲线更加平缓,说明挂车车轴距离牵引车前轴的距离加长,表现出较好的横摆角速度、侧向加速度响应特性,也一定程度说明有效提高操纵稳定性.
5 结论
在方向盘角阶跃输入工况试验中,随着车速的提高,牵引车和挂车的侧向加速度、横摆角速度、侧倾角等参数均有所变大.在方向盘角阶跃输入工况试验中,通过对牵引车及挂车质量、牵引车轴距、挂车车轴距牵引车前轴的距离、牵引车铰接点到前轴的距离等参数的改变对车辆进行仿真试验,仿真实验表明:适当的增加牵引车的质量、加长牵引车轴距、加长挂车车轴距牵引车前轴的距离,而降低挂车质量、缩短牵引车铰接点到前轮的距离能有效提高半挂汽车列车操纵稳定性.
[参考文献]
[1]董金松.半挂汽车列车弯道制动行驶方向稳定性及协调控制策略研究[D].长春:吉林大学,2010.
[2]杨秀建,康南,李西涛.半挂汽车列车横向失稳的非线性动力学机制[J].机械工程学报,2012(8):79-89.
[3]关志伟.半挂汽车列车行驶稳定性动力学仿真研究[D].长春:吉林大学,2003.
[4]Adrian Simms,David Crolla.The Influence of Damper Properties on Vehicle Dynamic Behaviour[C].SAE Paper,2002-01-03.
(责任编辑:李洁坤)
中图分类号:TP29
文献标识码:A
文章编号:2096-2126(2016)03-0144-05
[收稿日期]2016-03-20
[基金项目]广西高校科学技术研究基金重点资助项目(2013ZD002)。
[作者简介]龙佳庆(1983—),女,硕士研究生,讲师,研究方向:汽车运用技术。
The Simulation Test Research on the Step Input of Steering Wheel of Semidragging Trucks Based on the TruckSim
LONG Jiaqing1,2,WEI Chaoyi2
(1.Liuzhou Vocational&Technical College,Liuzhou,Guangxi,545006 china.2.Guangxi University,Nanning,Guangxi,530004 China)
Abstract:This paper describes building up the model of the semi-dragging trucks by the software called TruckSim to make the steer⁃ing wheel angle step input test,the way of which is to change the parameters of the tractor and the trailer in order to research the influence toward handing stability.The results show that the handling and stability characteristics has improved by increasing the tractor’s quality appropriately,lengthening the distance of the tractor’s axis,lengthening the distance between the trailer’s axis and the trailer’s wheels,reducing the trailer’s quality and reducing the distance between the tractor’s hinged joint and the front wheels.
Key words:semi-dragging trucks;TruckSim;the steering wheel angle step input;handing stability