火箭橇遮光板法时空位置测试技术*
2016-08-02 07:28:13王艳艳穆高超朱轶龙
弹箭与制导学报 2016年2期
孙 浩,王艳艳,穆高超,朱轶龙
(中国兵器工业试验测试研究院,陕西华阴 714200)
火箭橇遮光板法时空位置测试技术*
孙浩,王艳艳,穆高超,朱轶龙
(中国兵器工业试验测试研究院,陕西华阴714200)
摘要:为了解决火箭橇试验橇体运行高精度的时空位置测试难题,提出了遮光板时空位置测试方法,主要围绕该测试方法展开,提出了整体设计思路,并就光电组件设计、橇载数据记录仪设计、遥测系统设计、遮光板设计及其布设方法、遮光板靶距测量方法、数据处理方法等方面进行了论述。设计人员开发研制了相关产品,并通过多发试验验证,取得了良好的测试数据。该方法测试精度高,可以满足惯性测量装置功能和精度考核试验,使用前景广泛。
关键词:光电组件;高精度计时;遮光板
0引言
在火箭橇试验中,火箭橇高精度的全程时空位置测试不仅对于考核惯导器件的某些性能指标、惯导方程误差模型的建立、加速度计标定等方面都具有重要的作用,而且是表征被测体运动特性的重要参数、衡量弹药特性和弹道特性的重要指标,为更加深入的分析和研究橇体结构提供了准确的理论依据和大量的真实数据。因此,多家试验单位均提出了对火箭橇运行过程中时空位置的测试要求。
目前,对火箭橇试验时空位置测试,主要有雷达测试法、断靶加时统测试法、光电经纬仪测试法等,但都有一定的局限性,测试精度也无法满足高精度时空位置测试的需求。
为了解决火箭橇全程时空位置测试的问题,提出了遮光板全程时空位置测试的设计思路。该测试系统可测试火箭橇试验橇体全程的时空位置数据(s-t)、全程速度(v-t)、橇体运行加速度(a-t)等数据,可应用于惯性测量装置火箭橇试验、孔径合成雷达地面成像等火箭橇试验中,可为惯组等被试品误差模型的建立、加速度传感器的标定、橇体结构的分析、弹道的分析提供有力的数据支持。
1测试原理
该系统测试原理是在火箭橇轨道上按照试验弹道要求间隔一定距离安装遮光板,并用测距仪测量出每个遮光板相对于橇体运动零点的距离,建立遮光板空间位置数据库;在火箭橇橇体上安装光电组件和主控部分,火箭橇运行时,过一个遮光板,光电组件产生一个脉冲信号。该脉冲信号可接入橇载数据记录仪进行数据的实时记录存储,也可接入遥测系统进行数据的实时传输。
橇载记录仪里面的计时器记录下火箭橇运行过程中经过各个遮光板的时刻,事后通过读数得到火箭橇经过各个遮光板的时刻,再和每个遮光板的距离对应,经数据处理软件处理,可得到火箭橇在全程运行过程中的时空位置关系。
整个遮光板高精度时空位置测试方法的研究,主要包括光电组件设计、遮光板设计及布设、遮光板靶距测量方法、橇载记录仪设计、遥测系统设计、数据处理方法等。系统原理框图如图1所示。

图1 系统原理框图
2光电组件设计
目的是解决火箭橇试验中橇体过每个遮光板的信号触发问题,试验时光电组件安装在橇体一侧,其激光发射与接收通道要正对遮光板,当光电组件随着高速运行的火箭橇经过安装在火箭橇轨道旁边的遮光板时,产生脉冲信号,该信号为橇载记录仪在内的其他设备提供触发信号。该光电组件获取和传输的时间信号准确、无误、可靠、响应快,随火箭橇高速运行时能平稳、顺畅的通过所有的遮光板,不发生磕碰等现象。原理设计框图如图2所示。

图2 光电组件原理框图
3存储记录仪设计
3.1原理简介
该部分由高精度计时器、高精度时间基准模块、稳压模块、读数模块、存储模块等组成[1],橇载记录仪中高精度计时器模块,其中的高精度计时器用CPLD来进行控制,产生高精度的时间信息,输出火箭橇经过各个遮光板的时刻。从火箭橇启动零点开始,CPLD内部的计时器开始工作,当计时芯片控制管脚接收到光电组件发来的脉冲信号后,高精度计时器模块中的锁存器锁住此刻的时间,控制数据选择器将锁住的时间信息取走,传给存储器,记录下脉冲来临的每个时刻[2]。原理框图如图3所示。
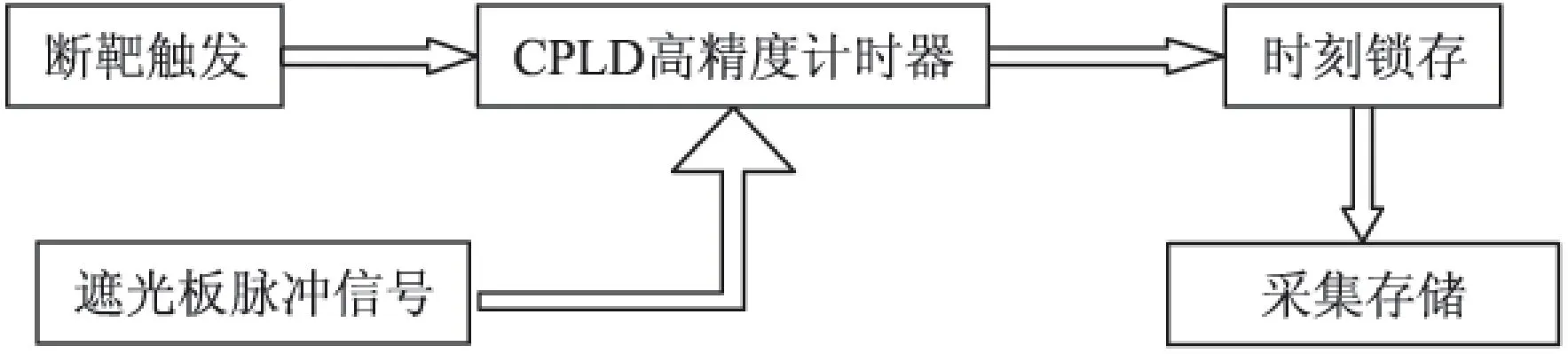
图3 记录仪原理框图
3.2高精度计时控制模块
CPLD内部逻辑图如图4所示。

图4 CPLD内部原理图
本模块是数据记录仪电路设计的核心部分,利用CPLD芯片EPM7160实现高精度计时锁存及采集存储控制等功能。数据记录仪分为读、写两种状态。当处于写状态时,CPLD芯片在接收到触发模块的DB触发信号或TTL触发信号后其内部的32位计数器开始计数[3],并将接收到高电平脉冲信号的到来时刻值锁存,再利用内部的存储控制时序模块,将锁存的时刻值存储到存储模块内。依次循环,可有效记录多个时刻值,当处于读状态时,CPLD芯片在接收到触发模块的触发信号后,控制读数芯片读出存储器的数据。
3.3高精度时间基准模块
高精度计时器模块中包括一个高精度时间基准模块,产生高精度的时间信息,晶振频率为10MHz,精度为1×10-6Hz[4]。高精度时间基准模块包括恒温晶体振荡器和调试电路。供电电压5V,输出方波。具有体积小、可靠性高、抗振能力强等特点。
3.4稳压模块
光电组件和橇载记录仪采用锂电池直流供电,整体供电中设有稳压模块,将锂电直流7.4~8.4V转化为标准的5V输出,设计中采用LM1117等稳压模块以及相关的滤波电路。LM1117稳压模块输入电压6.5~12V,输出4.85~5.15V,输出电流0~800mA。
3.5存储模块设计
采用HK1255存储器,存储容量512K,该存储器内置锂电池,在无外部供电情况下10a数据不会丢失,低功耗,抗振性能强,可满足9km试验的测试需求,记录时间约为429s。如果需要增加记录时间,可选用同类型的更大存储容量产品[5]。
4遥测传输方案设计
遮光板时空位置信息测试是通过遥测获取火箭橇经过在各个规定位置布设的遮光板时的遥测时间,将其与各位置的遮光板位置信息来一一对应的方法实现的。具体实现方法是:一路断靶启动信号和一路遮光板脉冲信号同时接入遥测采集器。当火箭橇开始运动的瞬间,断靶启动信号输出高电平,遥测采编器在此时记录下遥测采集器系统时钟的时钟计数值,并将其作为记录时间的零点时刻值;当橇体经过一个又一个遮光板时,遮光板脉冲信号也相应的输出一个又一个高电平脉冲。遥测采编器每采集到一个脉冲信号都会读取一次系统时钟的计数值,并将其与之前的零时刻值一同编入遥测帧的某固定路,再传输至地面进行遥测解码和数据还原,最终换算成遥测时间序列。工作时序如图5所示。
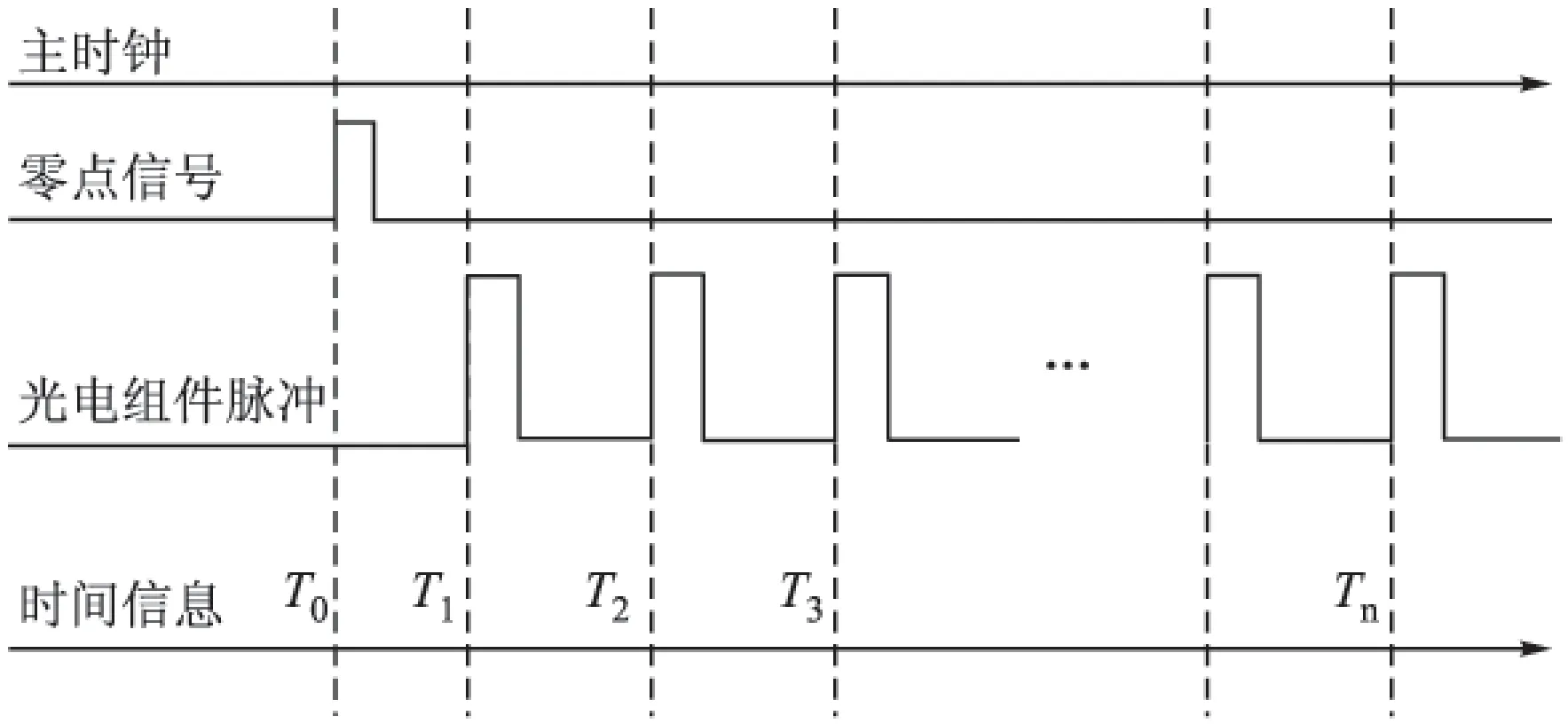
图5 遥测系统遮光板时间信息测试时序图
5遮光板设计及布设
5.1遮光板设计
遮光板的作用是遮挡激光束,使光电组件产生脉冲信号,并作为时空位置的地面标记点,提供时空位置测试的地面位置信息。设计时必须考虑其宽度、高度、线性度、水平度、垂直度等因素的影响。
5.2遮光板布设
在火箭橇轨道上按照试验弹道要求间隔一定距离安装遮光板,用象限仪对遮光板进行垂直度和水平度调整,并用测距仪测量出每个遮光板相对于橇体运动零点的距离,建立遮光板空间位置数据库。遮光板距离根据试验要求设置,安装在轨道一侧的轨道扣件螺杆上,为了防止混淆,每个遮光板都编有序号。
6遮光板靶距测量方法
用高精度的中长距电磁波测距仪器,如LEICATCA2003电子全站仪或其他高精度测距仪器对每个遮光板的距离进行精确测量,仪器最高精度1mm,分辨率0.01mm,测量最大距离可达2.5km。精确测量各个遮光板之间的距离,使距离误差控制在最小范围之内,确保全程时空位置测试的测试精度。
7数据处理方法
7.1存储测试数据处理方法
试验结束后,从橇载记录仪中读取原始数据,经处理后得出火箭橇体经过各个遮光板的时间数据。将时间数据与遮光板空间位置数据库相对应,通过相邻遮光板的距离ΔS及与其对应的橇体运行时间ΔT,通过V=ΔS/ΔT,可以计算出橇体在这一区间的平均速度,并根据火箭橇体运行规律找出异常速度数据所对应的时间数据及空间数据,将不符合规律的时间数据或空间数据剔除,得出最终的火箭橇时空位置测试数据。数据中应包含空间位置数据、靶距数据、火箭橇体运行速度等信息。
7.2遥测系统测试数据处理方法
在软件中加入异常数据判读剔除程序,当在数据实时传输的过程中有异常数据时,可直接剔除,地面终端不仅可将时空位置数据实时存储,而且可在显示屏幕上实时显示,画出时空位置运行曲线图,实时显示橇体运行的情况,并可快速处理试验数据,方便快捷。
8结束语
经过设计研究,该测试方法测试精度高,可以满足惯导等高精度时空位置测试的试验,开发研制了相关测试设备,并成功应用于多项火箭橇试验中,取得了良好的测试效果。采用橇体数据存储和遥测传输的方式,测试可靠性高。
参考文献:
[1]阎石. 数字电子技术 [M]. 北京: 高等教育出版社, 2001: 66-67.
[2]李建忠. 单片机原理及其应用 [M]. 西安: 西安电子科技大学出版社, 2001: 35-36.
[3]童诗白. 模拟电子技术 [M]. 北京: 高等教育出版社, 2000: 44-45.
[4]吴金戌, 沈庆阳, 郭庭吉, 等. 8051单片机实践与应用 [M]. 北京: 清华大学出版社, 2004: 25-26.
[5]潘松, 黄继业.EDA技术实用教程 [M]. 北京: 科学出版社, 2004: 33-34.
*收稿日期:2014-12-19
作者简介:孙浩(1983-),男,陕西富平人,高级工程师,研究方向:靶场火箭橇试验与动态测试。
中图分类号:TJ768.3
文献标志码:A
ResearchonPositionandTimeTestingTechnologyforRocketSledShadingPlateMethod
SUNHao,WANGYanyan,MUGaochao,ZHUYilong
(TestandMeasuringAcademyofChinaOrdnanceIndusties,ShaanxiHuayin714200,China)
Abstract:In view of difficulty in high-precision test of time and position in rocket sled test, shading plate position and time testing method was presented. Based on the method, overall design idea, photoelectric component design, sled borne data recorder design, telemetric system design, shading plate design and layout method, measurement methods from the shading plate, target data processing method and other aspects were discussed in this paper. Designers developed related products, tests prove that the test data obtained is good. The method can achieve high testing precision, and can meet inertial measurement unit function and accuracy test, it is prospective.
Keywords:optoelectronic components; high-precision timing; shading plate