基于参数估计的动平台雷达等效轴系参数准实时标定方法
2016-08-01 06:31:26李晓勇
无线电工程 2016年7期
杨 磊,刘 冰,李晓勇
(中国卫星海上测控部,江苏 江阴 214431)
基于参数估计的动平台雷达等效轴系参数准实时标定方法
杨磊,刘冰,李晓勇
(中国卫星海上测控部,江苏 江阴 214431)
摘要针对基于动平台的外测设备状态易发生变化与在轨卫星跟踪时对测量精度要求高的矛盾,在标定光电偏差与重力下垂参数的基础上,通过对跟踪在轨星的外测数据处理,利用基于嵌入协作策略的参数估计方法实现了船载外测设备等效轴系参数的标定。实际应用检验表明,该方法可实现经外测设备参数的快速标定,经校飞评估使用新标定的等效轴系参数后船载外测设备测角数据精度均优于40″。经分析验证,该方法不受初始轴系参数、惯导零值标定误差、光电偏差标定误差和定向灵敏度误差等外界因素的影响,可推广至各类动态平台雷达的参数标定。
关键词测量船;等效轴系参数;参数估计
0引言
随着我国在轨卫星数目的日益增多,测量船承担了部分在轨卫星的长期管理(简称长管,下同)工作,这就需要船载外测设备一直保持良好的状态和具备较高的测量精度。与陆站不同,测量船是在运动的条件下测量运动的目标,其轴系误差往往表现为在一定范围内变化,因此有必要经常性地获取动态条件下船载外测设备轴系误差修正参数,以提高船载测量系统对卫星长期管理的精度。
传统方法上,获取船载外测设备的轴系参数通过坞内标校的方法进行,即在测量船进船坞坐墩静止不动的条件下,在船坞四周建立方位标、校准塔和大地测量基准点等标校设施,以当地水平面和方位标的大地测量成果为基准,对船载外测设备进行标校,同时需对测量船平台上的惯导、变形等基准进行精确标校,以达到船载无线电高精度测量的效果[1]。
传统坞内标校方法组织实施难度大、耗资多、周期长,需要协调船厂工期进厂坐坞进行,一般只在测量船建成时或设备进行了较大规模的技术改造后才组织进行。当某些原因导致船载外测设备轴系参数的变化(如微光电视光轴发生变化等情况)无法用传统方法标定,这就会影响船载外测设备的测量精度。为了提高和保持船载外测设备的测量精度,需要解决针对固定卫星长期管理的船载外测设备轴系参数标校问题。
本文提出了一种在船载外测设备基座下安装一套捷联惯导,在测量船执行卫星长管任务过程中,通过卫星的精密星历标定出与外测设备轴系参数物理意义不同的等效轴系参数,以达到提高卫星长管外测精度的目的。
1动平台雷达等效轴系参数准实时标定方法基本原理
1.1误差源分析
外测设备基座下安装捷联惯导后,输出的外测数据经过系统误差修正(轴系参数修正)、船摇修正后即可转换到惯导地平系,影响其外测精度的主要因素为:系统误差、船摇误差和船位误差[2]。由于捷联惯导内GPS接收机解算船位数据的定位精度为m,因此可忽略船位误差的影响[3]。
系统误差修正直接影响着测量船的外测精度,是设备误差修正的重要环节。测量船外测设备的系统误差项包括:大盘不水平、方位和俯仰零值、两轴不正交、光机偏差、横向和纵向光电偏差、重力下垂以及方位和俯仰的动态滞后等[4]。其中,方位和俯仰的动态滞后直接利用设备记录的角误差电压转换后修正,如果设备的定向灵敏度准确(或误差影响较小),修正完动态滞后误差后可忽略此项系统误差;横向和纵向光电偏差2个参数需要根据不同目标的点频和旋向分别标定,与跟踪目标相关,重力下垂与同组光电偏差配套使用时其影响较小;其余系统误差项均反映了外测设备转盘、机械轴、光轴的状态,与跟踪目标和跟踪性能无关[5]。
基于参数估计的动平台雷达等效轴系参数准实时标定方法就是将船摇的零值误差、与跟踪目标有关的横向和纵向光电偏差等参数折算为大盘不水平、方位和俯仰零值、两轴不正交和光机偏差6个轴系参数上,最终标定出6个等效的轴系参数。
1.2光电偏差等效为轴系参数原理
测量船无线电外测设备系统误差修正模型为[6]:
E′=E-E0-βm·cos(A-Am)-Ce-ΔEZ-ΔEg·cos(E),
A′=A-A0-βm·tan(E)sin(A-Am)-δm·tan(E)-
Sb·sec(E)-CS·sec(E)-ΔAZ·sec(E)。
(1)
从修正模型式(1)可看出,横向光电偏差Cs与光机偏差Sb相关,对方位外测数据的影响因子均为sec(E);纵向光电偏差Ce与俯仰零值E0相关,对俯仰外测数据的影响因子均为1。可见,如果横向光电偏差Cs和纵向光电偏差Ce存在误差时,其误差量可等效为光机偏差Sb和俯仰零值E0的误差量。
1.3船摇零值误差等效为轴系参数原理
假设捷联惯导坐标粗取齐后航向、纵摇和横摇的零值误差分别为:Δk、Δψ和Δθ,均为常值。惯导姿态角误差的物理模型为[7]:

(2)
综合分析式(1)和式(2)可看出,航向零值误差Δk与方位零值A0相关,对方位外测数据的影响因子均为1;纵摇零值误差Δψ与大盘不水平参数Am、βm相关,对方位外测数据的影响因子均为sinAtanE,对俯仰外测数据的影响因子均为cosA;横摇零值误差Δθ与大盘不水平参数Am、βm相关,对方位外测数据的影响因子均为cosAtanE,对俯仰外测数据的影响因子均为sinA。可见,航向零值误差Δk可等效为方位零值A0的误差量,纵摇和横摇零值误差均可等效为大盘不水平参数Am、βm的误差量。
2基于参数估计的动平台雷达等效轴系参数准实时标定方法
现有的动态标定技术是以外测设备的微光电视和经纬仪同步跟踪恒星的方式,获取不同跟踪性能下的测量数据,利用外测设备相对于经纬仪的测量误差计算出外测设备的轴系参数,包括大盘不水平、方位和俯仰零值、两轴不正交和光机偏差[8]。在测量船经纬仪以及变形设备不能正常工作的情况下,需研究通过外测设备电跟过境星的方式获取不同跟踪性能下的测量数据,利用外测设备测量数据相对于GPS或精密星历的误差计算出外测设备相关参数的方法,除前面所述的6个轴系参数外还包括横向和纵向光电偏差、重力下垂、方位和俯仰的动态滞后。
船载USB设备系统误差修正模型为:
E′=E-E0-βm·cos(A-Am)-Ce-ΔEZ-ΔEg·cos(E),
Sb·sec(E)-CS·sec(E)-ΔAZ·sec(E)。
(3)
由式(3)可看出,俯仰上,零值、纵向光电偏差和动态滞后是相关的;方位上,光机偏差、横向光电偏差和动态滞后是相关的,因此无法直接对所有参数进行估计。对于参数相关的问题,需在事后数据处理和计算过程中分步骤处理和进行参数估计,步骤如下:
① 将被跟目标GPS数据或精密星历插值后转至惯导地平系;
② 在惯导地平系对GPS数据或精密星历反修电波折射误差,并转至外测设备甲板系;
③ 对外测设备外测数据修正动态滞后、重力下垂和光电偏差;
④ 以②输出的GPS数据或精密星历为标准,计算③输出的外测设备外测数据误差;
⑤ 利用④输出的外测数据误差计算外测设备的大盘不水平、方位和俯仰零值、两轴不正交和光机偏差6个等效轴系参数;
⑥ 对⑤输出的参数进行验证。
3基于嵌入协作策略的参数估计方法
在外测设备等效轴系参数标定过程中,参数估计方法对利用外测数据误差计算等效轴系参数有着显著的影响。工程应用中要求参数估计过程中快速收敛到全局最优解。高斯牛顿法的最大优点是求解局部最优解时,在参数初值选择适当的情况下,收敛速度快、精确度高。但从理论上来说获得的是局部最优解而不是全局最优解,如果参数迭代初值设置不当,可能得不到问题的真实解。遗传算法求解函数优化问题具有很好的全局搜索能力,不受搜索空间的限制性假设约束,鲁棒性强,在求解优化问题全局最优解方面得到了广泛的应用。但存在局部搜索能力不强、收敛速度较慢等和收敛结果精度低等不足。
本文针对2种参数估计算法的不足,使用了遗传算法和高斯牛顿法结合的协作优化估计方法。协作优化可以采用并联、串联、串并联和嵌入4种策略。
嵌入协作策略,即把高斯-牛顿迭代方法嵌入到遗传算法的过程当中:在遗传算法执行优胜劣汰步骤之前由一定的概率PGauss=0.1对个体执行高斯-迭代算法计算该个体阈附近的局部最优解,采用浮点数编码,一组等效轴系参数即为一个染色体,每个染色体有6个基因片段(6个等效轴系参数),设种群数为m,最大进化代数为T,具体的算法流程如下:
① 输入:轴系参数初值作为一个染色体个体,在初值上加入一定范围的随机数产生另外m-1个种群个体,考虑到各个等效轴系参数的取值范围,在大盘不水平方向上加入0°~100°的随机数,其余参数加入0″~300″的随机数。
② 对每个个体,以PGauss的概率决定是否要对该个体执行高斯-迭代求解,如果需要,则对该个体执行高斯-牛顿迭代估计,并把估计后的等效轴系参数赋值给该个体。
③ 计算每个个体的适应值Fi,Fi定义为外测数据误差平方和,Fi越小则该个体越优。
④ 根据③计算的适应值Fi,淘汰适应值最大的个体,直到种群个数恢复为m个。
⑤ 个体杂交,对每个个体,以Pc=0.5的概率决定是否要执行杂交操作,如果需要则随机再取另一个个体,假设取到的2个体为:


设B1,B2的适应值分别为Fi1,Fi2,对B1,B2执行算术交叉,
C=(C0,C1,C2,C3,C4,C5,),

……

其中交叉因子由2个个体的适应值决定,
即2个个体的交叉结果是靠近适应值小的个体。
⑥ 个体变异,对每个个体,以Pm=0.05的概率决定该个体是否需要变异,如果需要变异,则在该个体的6个等效轴系参数上加上一定范围的随机数(随机数范围与①初始生成时的范围相同)。
⑦ 获得最优解,进化代数T=T+1,如果进化代数已经达到最大进化代数或者连续N代的最优解都是相同的,则终止进化,否则循环执行步骤②~⑦。
4标定方法稳定性分析
4.1初始轴系参数误差对标定结果的影响分析
分析初始值对估计结果的影响,利用测量船某次任务USB设备跟踪数据,分析当方位零值、俯仰零值和光机偏差分别存在100″、200″和300″误差时对标定结果及效果的影响,主要参数估计结果如表1所示。
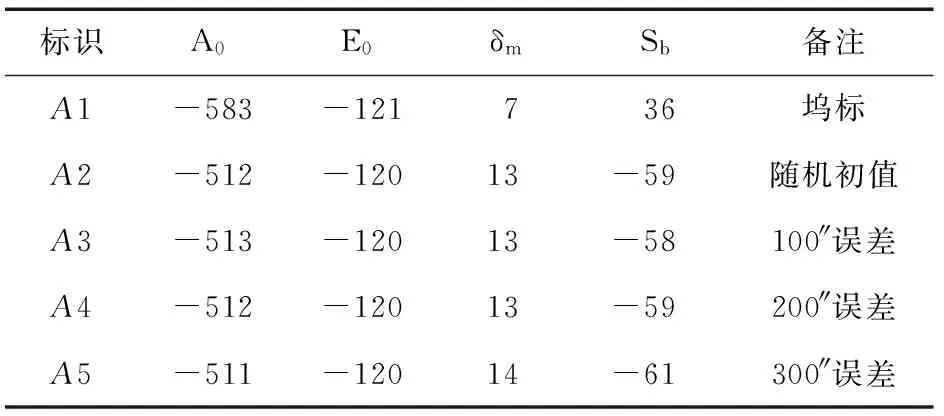
表1 初始轴系参数存在误差时等效轴系参数
从参数标定结果看,当初始轴系参数存在误差或使用随机初始轴系参数时,对最终的参数标定效果影响较小。
4.2捷联惯导零值误差对标定结果的影响分析
惯导数据直接影响着外测精度,捷联惯导后在码头动态条件下进行坐标粗取齐,会导致惯导零值有误差。利用测量船某次任务外测设备测量数据,分析惯导航向零值、纵摇零值、横摇零值存在20″、40″和60″误差时对等效轴系参数标定结果的影响,主要参数估计结果如表2所示。
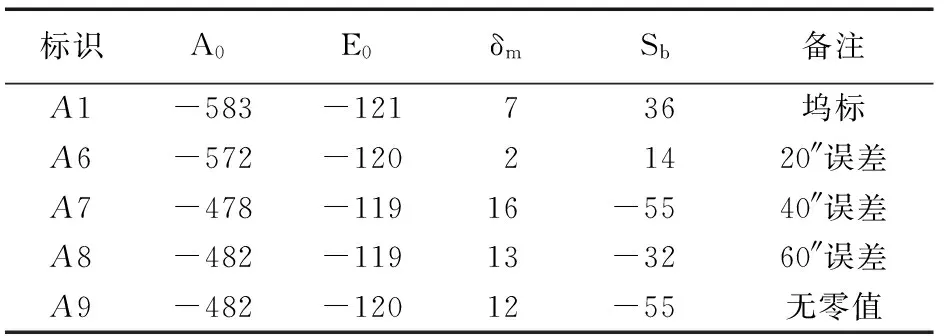
表2 捷联惯导零值存在误差时等效轴系参数
注:① “20″误差”指惯导航向、纵摇和横摇的零值加20″误差时参数标定结果,其余相同;② “无零值”指将惯导的各零值统一设置为0。
从理论上分析,航向零值误差会折算到方位零值参数,横摇和纵摇零值误差会折算到大盘参数中,但从参数标定结果看,航向零值误差不完全是1∶1折算到方位零值参数中,船摇零值误差对俯仰零值的影响较小。从验证结果看,当标定数据和验证数据的船摇存在固定的零值误差或不装订零值时,对最终的外测精度影响不显著。
4.3光电偏差误差对标定结果的影响分析
利用测量船外测设备跟踪数据,分析被跟目标光电偏差存在20″、30″和40″误差时对外测设备轴系参数标定结果的影响,主要参数估计结果如表3所示。
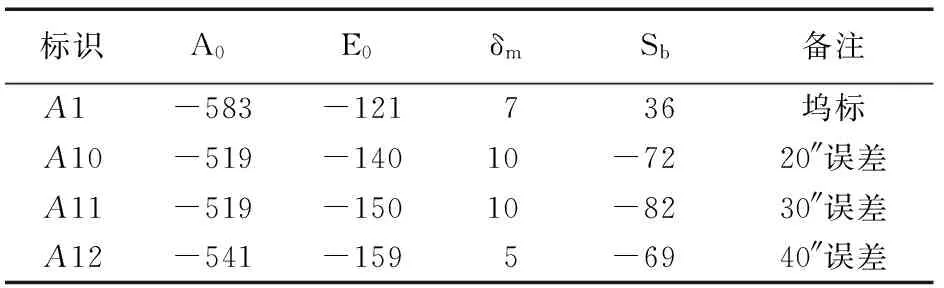
表3 初始轴系参数存在误差时等效轴系参数
从参数标定结果看,纵向光电偏差参数误差对俯仰零值的影响基本为1∶1,横向光电偏差参数误差主要影响方位零值和光机偏差参数的标定。
4.4定向灵敏度误差对标定结果的影响分析
利用测量船外测设备跟踪数据,分析外测设备定向灵敏度参数存在0.1、0.2和0.3的误差时对等效轴系参数标定结果的影响,主要参数估计结果如表4所示。
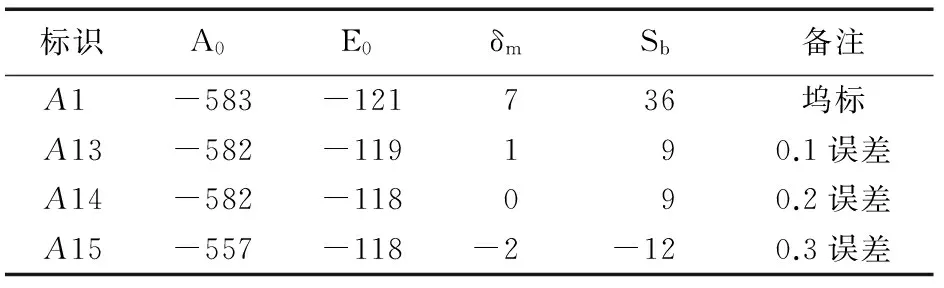
表4 初始轴系参数存在误差时等效轴系参数
从原理分析和参数标定结果看,定向灵敏度和轴系参数无直接相关性。
5应用情况及分析
5.1应用情况
测量船在执行卫星长管任务前,通过设备改造,在外测设备天线基座下安装一套捷联惯导。在长管任务过程中,外测设备跟踪在轨卫星,以卫星精密星历作为标准,对外测设备等效轴系参数进行标定,标定过程选择标定样本的跟踪性能分布如图1所示,标定结果如表5所示。
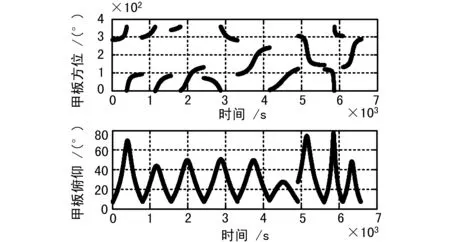
图1 某次试验标定样本跟踪性能分布
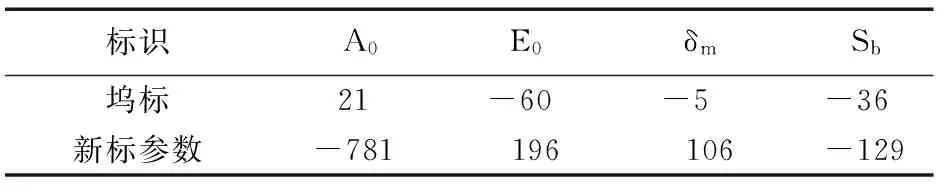
标识A0E0 δm Sb坞标21-60-5 -36新标参数-781 196 106 -129
5.2结果分析
测量船外测设备使用本文提出的新方法标定结果(见表5中的新标参数),在校飞精度检验中,经和高精度差分GPS进行比对,外测设备各测角精度统计结果如表6所示。
表6外测设备各测角精度统计结果
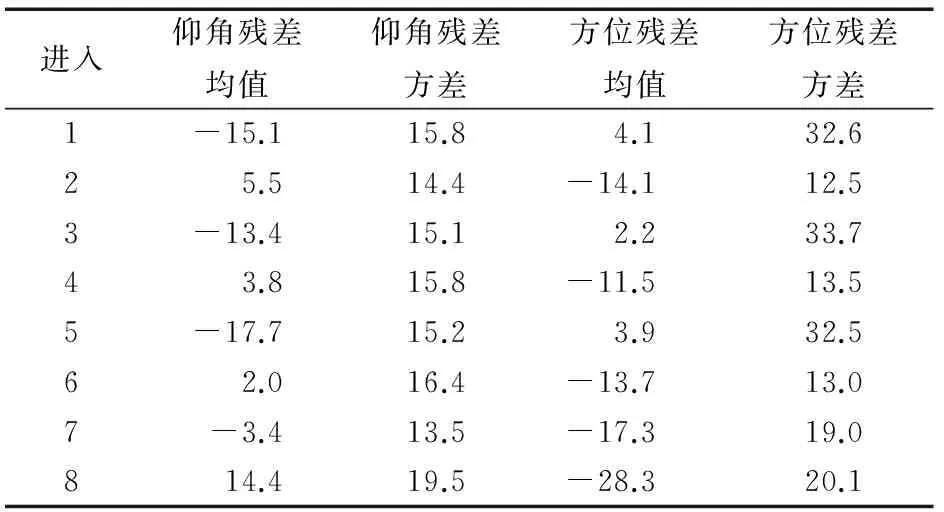
(单位:(″))
从标定结果和应用效果可看出,新标定等效方位零值约-13′,与以前坞内标定的方位零值有较大差异,主要原因为捷联惯导在标定前只进行坐标粗取齐,捷联惯导航向零值误差等效为外测设备方位零值,从校飞数据检验结果看,使用标定的等效轴系参数后测角精度基本优于30″。
6结束语
测量船传统的坞内标定方法主要以大地测量成果、经纬仪等为基准,且外测设备和惯导的参数独立标定,这些都需要以进坞标定结果为基础。本文提出的基于参数估计的动平台雷达等效轴系参数准实时标定方法,可适用于捷联惯导坐标粗取齐后,外测设备等效轴系参数直接标定,将惯导粗取齐的误差折合到外测设备的等效轴系参数中,无需以坞内标校坐标取齐为基础。同时,经过分析验证,本方法不受初始轴系参数、惯导零值标定误差、光电偏差标定误差以及定向灵敏度误差的影响。
本方法通过电跟方式标定等效轴系参数,与任务实战工作模式相同,标定参数精度高,根据验证结果,利用标定的等效轴系参数后,外测设备测角精度基本优于30″。本方法实施方便,可推广至各类动态平台雷达的参数标定。
参考文献
[1] 钟德安,张同双,李晓勇.基于标校经纬仪的测量船坞内标校新方法法[J].无线电工程,2009,39(7):49-52.
[2]康德勇,李晓勇,王旭良.船位误差对外弹道测量及定轨精度的影响[J].电讯技术,2010,50(9):106-109.
[3]李晓勇,张忠华,何晶.船体变形对航天测量船外弹道测量的影响[J].飞行器测控学报,2006,25(3):7-12.
[4]李晓勇,张忠华,杨磊.航天器海上测量数据的误差辨识与统计分析[M].北京:国防工业出版社,2013.
[5]衣同胜,胡梦中.舰载测量雷达零值标校方法研究[J].无线电工程,2013,43(6):26-29.
[6]王德纯,丁家会,程望东.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006.
[7]张同双,钟德安,李晓勇.基于递推最小二乘算法的惯导姿态误差动态标定方法[J].电讯技术,2011,51(8):11-15.
[8]康德永,傅敏辉,赵文华,等.基于恒星测量的船载雷达轴系误差修正参数动态标定[J].电讯技术,2013,53(7):949-952.
doi:10.3969/j.issn.1003-3106.2016.07.24
收稿日期:2016-04-25
中图分类号V557
文献标志码A
文章编号1003-3106(2016)07-0093-05
作者简介
杨磊男,(1983—),硕士,工程师。主要研究方向:数据处理与精度分析。
刘冰男,(1968—),硕士,研究员。主要研究方向:航天测控总体。
Study on Equivalent Axis Parameter Calibration for Radar System on Moving Platform Based on Parameter Estimation
YANG Lei,LIU Bing,LI Xiao-yong
(ChinaSatelliteMaritimeTrackingandControlDepartment,JiangyinJiangsu214431,China)
AbstractIn the satellite tracking process,the moving platform has a great impact on the precision of the devices.Using the parameter estimation method based on embedding collaboration,the calibration of the equivalent axis parameter for the ship-borne devices is achieved with the previous calibration results of the optical-electrical axis non-parallelism and the weight distortion error.A flying test is implemented to evaluate this calibration method.The result shows the angle measurement precision is better than 40″.In addition,this method is robust to the external factors such as the previous calibration error of the initial axis parameter,the zero value of the inertial navigation system,the optical-electrical axis non-parallelism as well as the directional sensitivity error.Moreover,this method can be used for radar parameter calibration on other moving platforms.
Key wordsmeasurement ship;equivalent axis parameter;parameter estimation.
引用格式:杨磊,刘冰,李晓勇.基于参数估计的动平台雷达等效轴系参数准实时标定方法[J].无线电工程,2016,46(7):93-97.
猜你喜欢
环球时报(2022-08-15)2022-08-15 17:13:41
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:28
军事文摘(2021年22期)2022-01-18 06:21:58
应用数学(2020年4期)2020-12-28 00:36:58
北京航空航天大学学报(2020年10期)2020-11-14 09:26:18
中国水运(2018年2期)2018-02-26 21:33:42
智富时代(2017年7期)2017-09-05 10:08:11
统计与决策(2017年2期)2017-03-20 15:25:22
科教导刊·电子版(2016年28期)2017-01-10 22:24:31
数学物理学报(2016年5期)2016-08-24 07:38:48