基于线性调频技术的主动式安防雷达设计
2016-08-01 06:31:03鲍晓利王志强
无线电工程 2016年7期
关键词:雷达
鲍晓利,王志强
(中国电子科技集团公司第十三研究所,河北省 石家庄 050000)
基于线性调频技术的主动式安防雷达设计
鲍晓利,王志强
(中国电子科技集团公司第十三研究所,河北省 石家庄 050000)
摘要为弥补现有视频安防技术、红外安防技术等在特定环境下存在的固有缺陷,线性调频连续波雷达被引入到安防技术体系中。目前,线性调频连续波雷达产品绝大部分为车载雷达,其不能被直接用于安防监控系统中。为满足市场和客户的需求,基于线性调频技术对主动式安防雷达进行了研究,并开发出了主动式安防雷达原型机。为对雷达原型机进行验证和分析,在真实环境下进行了测量实验。通过对实验结果进行分析,表明研发出的雷达原型机的可监测距离可达77m,可实时对单目标的方位、距离和速率进行测量。通过无监督背景学习方法的引入,雷达原型机可被应用于复杂场景中。
关键词安防监控;雷达;线性调频;动态目标检测
0引言
在主动安防领域,视频安防系统和红外安防系统等已成为安防技术防范系统中最为关键的子系统[1]。但在特殊环境条件(如雾霾、雨、雪、黑夜和沙尘暴等)下应用时,其有效性和可靠性将极大地降低。针对此问题,连续波雷达作为解决方法之一被引入到了安防技术防范系统中[2]。线性调频连线波(Linear Frequency Modulated Continuous Wave,LFMCW)雷达作为一种短距测量雷达系统,可对静态或动态目标的距离或速度进行有效测量。目前,LFMCW雷达一般应用于车载雷达,对行人的测量距离一般不超过50m,且在实际应用时受视场内背景杂波的影响较大。鉴于此,本文将LFMCW技术应用到了主动式安防雷达设计中,根据主动式安防雷达的实际应用场景提出了完整的系统设计方案,并对雷达硬件和数字信号处理算法进行了研发。此外,为满足实际应用需求,引入了MTI滤波、背景杂波去除、动态目标检测和背景自学习等技术到主动式安防雷达设计中。其中,背景杂波频谱图自学习方法为无监督机器学习算法在主动式安防雷达设计中的一次重要尝试,可有效解决雷达系统在复杂多干扰背景下的应用问题。
1主动式安防雷达系统原理


(1)

(2)
式中,Ac为发射信号幅度;wc为载波信号角频率;wb为调制信号角频率;θ为发射信号相位;θ′为接收信号相位;N为调制信号周期重复次数;Tp为调制信号周期;k为调制信号斜率;Ac′为接收信号幅度;Δt为雷达信号行程时间差。
由式(1)和式(2)可知,雷达视场内目标距离R为:

(3)
式中,c0为光速;Δf为差频信号频率。
动态目标速度为[4]:

(4)
式中,Rt1和Rt2为动态目标在t1和t2时刻的距离。雷达的距离分辨率ΔRmin和速度分辨率Δcmin为:

(5)
本文采用单基线相位干涉方法对动态目标的方位角θ进行测量,计算公式式为:


(6)
式中,d为接收天线1和接收天线2间的距离;SI1(k)、SQ1(k)、SI2(k)和SQ2(k)分别为雷达接收机I1、Q1、I2和Q2通道中频信号的离散傅里叶变换值。
2主动式安防雷达系统设计与实现
根据上述内容,本文对主动式安防雷达系统进行了设计和开发,其系统组成如图1所示。

图1 雷达系统组成
从图1中可知,雷达系统主要包括射频/中频模拟信号处理模块[5]和基带数字信号处理模块[6-7]。射频/中频模拟信号处理模块中所包含的功能部件已相对成熟,可通过定制的方式予以实现。限于篇幅,本文不对射频/中频模拟信号处理模块进行说明,感兴趣的读者可参看文献[8-10]。
基带数字信号处理模块所包含的功能组件因应用领域不同而有较大不同,尤其是随着近年软件无线电技术的快速进步,其功能组件的实现方法和性能也有着本质的差异。因此,基带数字信号处理模块为主动式安防雷达系统的核心模块。本文基带数字信号处理模块所包括的功能组件均采用TMS320 F28335 DSP平台和标准C语言进行开发,其算法流程图如图2所示。限于篇幅,本节仅对基带数字信号处理模块中的MTI滤波、背景杂波去除和动态目标检测功能组件的具体实现算法进行说明,其余功能组件的具体实现方法均在文献[8-10]中有详细阐述,读者可自行查阅。

图2 数字信号处理模块算法流程
在实际应用中,雷达视场内均存在一定面积的静态背景目标。为检测动态目标,须从雷达回波信号中分离出动态目标的雷达回波信号。为此,本文采用MTI滤波器对雷达回波信号进行数字滤波以去除静态背景雷达回波信号。MTI滤波器结构图如图3所示。

图3 数字MTI滤波器结构
经MTI滤波后的雷达回波信号中仍存在残留静态背景杂波、系统噪声和非平坦地面反射杂波等多种背景杂波。在实际动态目标检测中,须去除背景杂波以降低雷达系统的检测虚警率。由于背景杂波在不同的应用场景中均具有不同的特征,所以本文采用无监督学习方法主动获取雷达视场内的背景杂波频谱图,具体算法流程图如图4所示。图4中迭代次数M由用户设置。在背景杂波频谱图学习完成后,即可采用背差法去除背景杂波信号的频谱,并通过搜索幅度频谱最大峰值及其所对应的相位差获取动态目标的距离和角度信息。

图4 无监督背景频谱学习算法流程
根据第1节和本节内容,本文已研发出主动式安防雷达原型机,其尺寸为25cm×15cm×10cm。
3实验及结果分析
为对主动式安防雷达原型机进行验证分析,本文构建了动态目标(以人为测量对象)测量实验系统。实验系统配置示意图如5所示,雷达视场(方框内为行人)如图6所示。从图6中可看出,道路两侧存在着树、草地、灌木丛和楼房等多种类型背景目标。
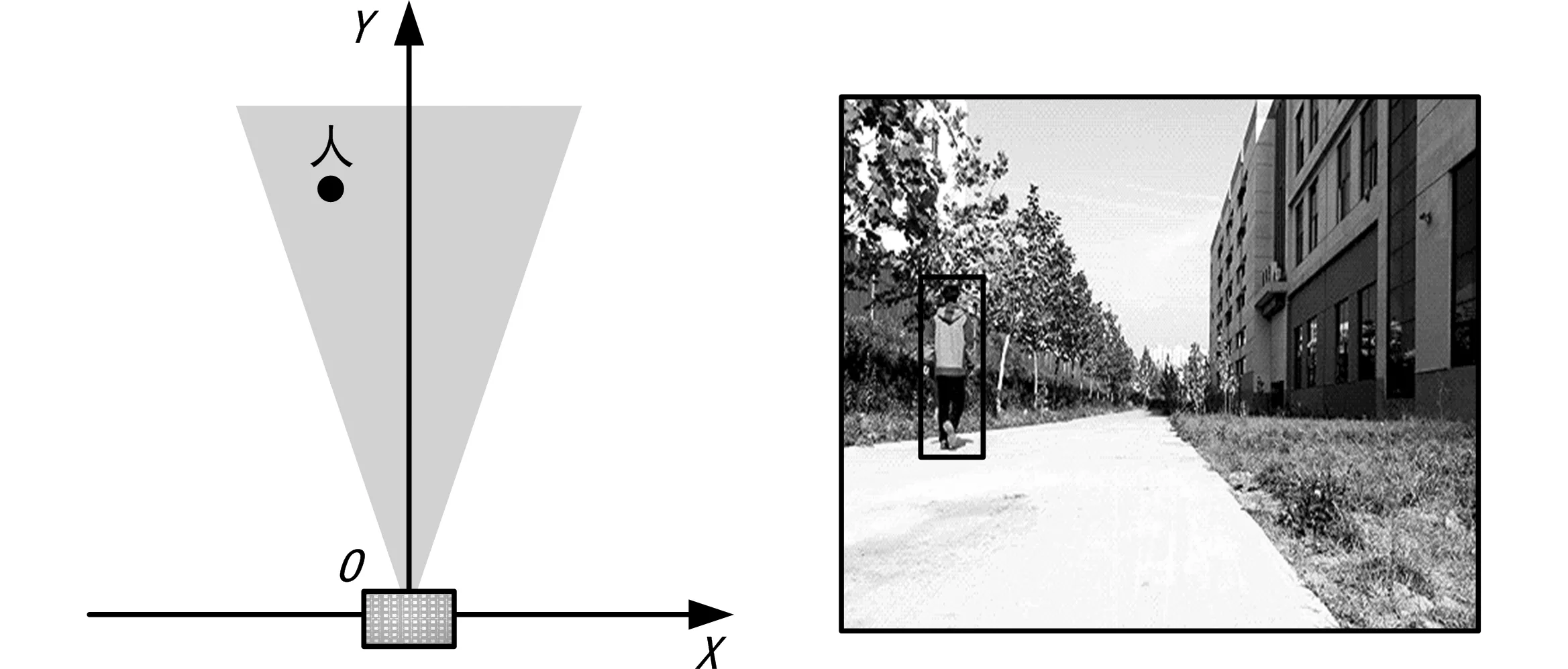
图5 实验系统配置示意 图6 雷达视场
本节将分别进行2组实验:第1组对固定距离或固定角度的行人进行测量;第2组实验对距离和角度均不固定的行人进行测量。通过对第1组实验数据进行统计分析可得雷达的距离分辨率和角度分辨率分别约为0.8m和1.7°。第2组实验对直线(近似直线)行走和迂回行走的行人分别进行跟踪测量,雷达测得行人的角度、距离、速度和运动轨迹如图7和图8所示。
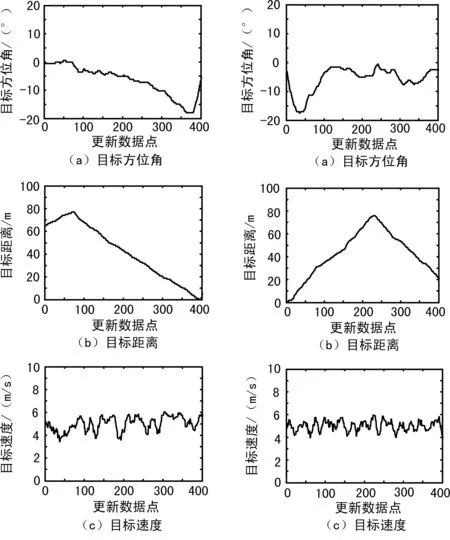
图7 行人直线行走 图8 行人迂回行走 测量结果 测量结果
从图7和图8中可知,雷达的测量距离范围约为3~73m。此外,还可看出雷达测得的行人运动速度具有较大的波动,其主要由人在行走的过程中身体各个部分均具有不同的速度及加速度造成的。将本文所研发雷达的技术指标同国内外相关雷达产品的技术指标进行比较,对比结果如表1所示。从表1中可知,本文所研发雷达在测量距离方面更优。
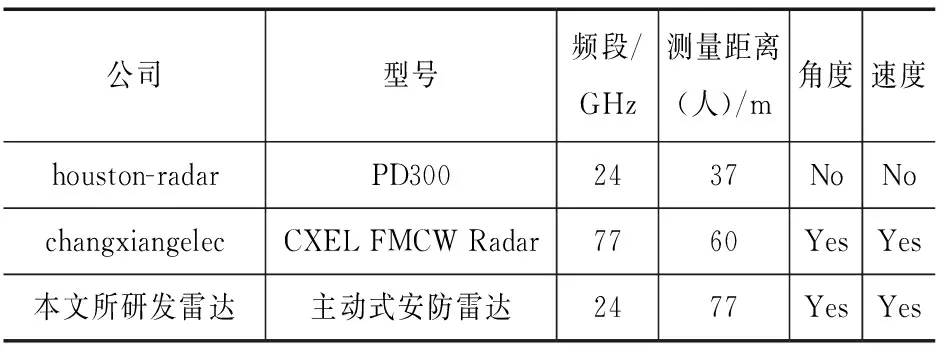
表1 雷达产品技术指标对比
4结束语
为满足安防领域对小型监视雷达的需要,本文基于LFMCW技术提出了一种主动式安防雷达。为实现LFMCW雷达在安防应用中的技术要求,引入了MTI滤波、背景杂波去除、动态目标检测和背景自学习等技术,并针对实际应用环境对其实现算法进行了优化,可实现单个目标的距离、方位、速度和路径的准确实时监测。其中,背景杂波频谱图无监督学习方法可有效降低复杂环境下的雷达虚警率,使主动式安防雷达系统具有较好的可用性。通过实验数据分析和雷达产品技术指标对比表明,本文所研发雷达相较于现有同类产品其整体性能更优,其中测量距离可达77m。
参考文献
[1]FORESTI G L,MICHELONI C,REMAGNINO P.Active Video-based Surveillance System:the Low-level Image and Video Processing Techniques Needed for Implementation[J].Signal Processing Magazine,2002,22(2):25-37.
[2]APPLEBY R,ANDERTON R N.Millimeter-wave and Submillimeter-wave Imaging for Security and Surveillance[J].Proceedings of the IEEE,2007,95(8):1 683-1 690.
[3]STOVE A G.Linear FMCW Radar Techniques[J].IEE Proceedings F (Radar and Signal Processing),1992,139(5):343-350.
[4]STELZER A,FISCHER A,VOSSIEK M.A New Technology for Precise Local Position Measurement-LPM[J].Microwave Symposium Digest,2004,2(2):655-658.
[5]GRAHAM M B.Understanding Millimetre Wave FMCW Radars[C]∥ 1st International Conference on Sensing Technology,Palmerston North,New Zealand,2005:152-157.
[6]YANKIELUNA Norbert,ROSENTHALB Walter,DAVISA Robert E.Alpine Snow Depth Measurements from Aerial FMCW Radar[J].Cold Regions Science and Technology,2004,40(1-2):123-134.
[7]MEINECKE M M,ROHLING H.Combination of FSK and LFMCW Modulation Principals for Automotive Radars[C]∥ German Radar Symposium GRS2000,Berlin,2000:298-301.
[8]SKOLNIK M I.Radar Handbook (2nd ed)[M].New York:McGraw-Hill Publishing Company,1990:57-237.
[9]ALIVIZATOS E G,PETSIOS Ml N,UZUNOGLU N K.Architecture of a Multistatic FMCW Direction-finding Radar[J].Aerospace Science and Technology,2008,12(2):169-176.
[10]HANDAYANI D O D,MALAYSIA K L.Design and Development of the FMCW Radar Scene Generator[C]∥ 2012 IEEE Symposium on Industrial Electronics and Applications (ISIEA),Bandung,2012:39-44.
doi:10.3969/j.issn.1003-3106.2016.07.06
收稿日期:2016-04-01
中图分类号TN959.6
文献标志码A
文章编号1003-3106(2016)07-0021-04
作者简介
鲍晓利男,(1985—),博士,工程师。主要研究方向:模拟/数字阵列天线设计、雷达信号处理。
王志强男,(1971—),高级工程师。主要研究方向:雷达系统设计、微波组件/模块设计。
An LFMCW Based Design of Active Security Surveillance Radar
BAO Xiao-li,WANG Zhi-qiang
(The13thResearchInstituteofCETC,ShijiazhuangHebei050000,China)
AbstractConsidering the inherent defects of video or infrared surveillance technologies,Linear Frequency-Modulated Continuous-Wave (LFMCW) radars are introduced into security surveillance applications.Currently,most LFMCW radar products are used as vehicular anti-collision radars,which can’t be applied directly in security surveillance.Therefore,LFMCW based active security surveillance radars are studied in this paper,and a prototype is developed.A set of experiments are conducted in real application environment.The experimental results show that the prototype radar can measure the direction,range and speed of the target,and the maximum measured range is up to 77m.The prototype radar can be applied in various scenarios by using background self-learning algorithm.
Key wordssecurity surveillance;radar;LFMCW;MTI
引用格式:鲍晓利,王志强.基于线性调频技术的主动式安防雷达设计[J].无线电工程,2016,46(7):21-24.
猜你喜欢
雷达学报(2023年5期)2023-11-06 08:58:22
大自然探索(2023年7期)2023-08-15 00:48:21
电子制作(2019年15期)2019-08-27 01:12:02
航天电子对抗(2019年4期)2019-06-02 08:22:36
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
成都信息工程大学学报(2017年4期)2018-01-22 02:08:18
火控雷达技术(2016年3期)2016-02-06 02:30:26
火控雷达技术(2016年2期)2016-02-06 02:28:53
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
自动化博览(2014年7期)2014-02-28 22:32:25