移栽机取苗机构三维仿真
2016-08-01 03:07赵春龙杨传华魏天路周海波依红杰
中国科技信息 2016年13期
赵春龙 杨传华 韩 涛 魏天路 周海波,2 依红杰 丛 军
移栽机取苗机构三维仿真
赵春龙1杨传华1韩涛1魏天路1周海波1,2依红杰1丛军3
1.佳木斯大学机械工程学院;2.天津理工大学;3.齐齐哈尔和平集团有限责任公司
赵春龙(1983-)男,在读硕士研究生 研究方向:移栽关键技术研究;通讯作者:杨传华(1970-)男,博士,教授,主要从事移栽关键技术研究工作。
项目名称及编号:国家自然科学基金 E050601;黑龙江省科学基金 E2015042;研究生科技创新LZZ2015_003;佳木斯大学重点项目 LZ2013-015
行业曲线
介绍Pro/E在移栽机设计方面的应用,首先阐述在三维建模上的应用,其次说明在运动仿真上的应用,最后介绍Pro/E、Adams与PFC3D的耦合联合仿真。从而阐明Pro/E在农业机械设计中不可或缺的地位,以及与其他软件联合仿真的强大功能。
蔬菜生产在我国的经济发展过程中发挥着重要作用,伴随着菜篮子工程的日益完善,我国的移栽产业正朝着多元化全自动化方向发展。按照栽植器的类型可以大致分为钳夹式、吊篮式、导苗管式和挠性圆盘式几类。钳夹式是由仿形机构控钳夹、链夹开合,但栽植速度比较慢,调整株距较为困难;导苗管式是由凸轮实现间歇动作,钵苗在导苗管中靠自身的重力沿导苗管滑落,但影响该移栽机栽植效果;挠性圆盘式由开盘轮、开盘叉来控制挠圆盘的开合,但栽植深度不稳定,且由于圆盘采用橡胶材料,寿命较短。目前,采用比较多的是吊篮式移栽机;但是由于吊篮式移栽机工作时靠凸轮和弹簧共同作用控制吊篮在回转过程中的开合,因此机构较复杂,喂苗速度不能过高,株距调整不便。针对这些复杂的机构就需要一个很强大的三维设计软件,笔者认为Pro/E应是首选,其优势:1. Pro/E具有广大的学者以及加工商在使用,即通用性好。2. Pro/E开发环境与仿真环境越来越接近实际需要,可以真实反应机械各种性能参数。3. Pro/E的兼容性很好,高压无功自动补偿的设计与应用它可以与Adams、PFC3D以及很多软件进行联合仿真。
三维建模
建模设计思路
本文思路是将一部分回转式移栽机构与线性移栽机构综合使用,研究其移栽效率等指标,回转式移栽机具有结构简单、成本低效率高,能适应恶劣的作业环境,并保持很高的可靠性,但其轨迹规划是一个极其复杂的过程,使研发周期变长。线性取苗机构惯性力大,取苗率低。但是将二者组合起来取长补短,会达到一个理想效果。回转式结构削弱了惯性力带来的影响,线性机构简化了设计的复杂性。从而缩短了设计周期。具体说明见图1机构分析对比图。
综上所述,本文就是将滑道机构、杆机构、回转机构有机的结合,使设计难度降低的同时保证栽植效率。
Pro/E三维建模
首先进入Pro/E三维建模环境选择标准模型环境,开始各个部件的建模,根据设计需要建立所需各个零部件,达到移栽机的栽植参数。其次进入装配环境,按照各个零部件的机械连接方式为其添加相应的约束,达到仿真环境所需。最后将创建好的装配图保存,移栽机三维模型如图2所示。
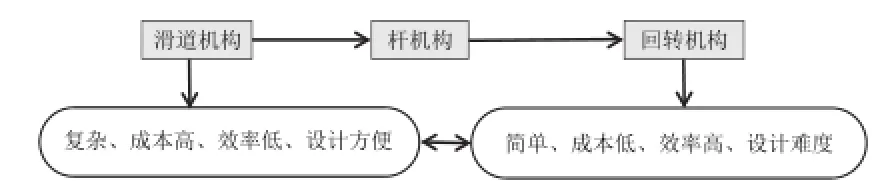
图1 机构分析对比图
仿真分析
模拟参数设置
打开移栽机装配环境,在其中选择应用程序按钮,选择应程序下的机构按钮进入机构环境,在机构环境下为其添加电机,即为装置添加动力来源。我们选择两个电机,第一个电机我们安装在机架上,带动曲轴旋转,第二个电机作为齿轮的动力来源。下一步为电机设置参数,具体如下:
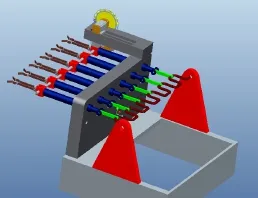
图2 移栽机三维模型

图3 取苗抓运动轨迹
第一个电机设置为常值速度类型:

第二个电机设置为位置函数类型:

期中变量分别是:V 电机转速、Y为齿轮旋转位置函数、t代表机械运转时间(与第一个电机时间同步)。
实验模拟轨迹线
在模拟环境下,在取苗抓顶端设置一个跟踪点,从而记录下取苗抓运动轨迹如图3所示。对轨迹进行分析得到如下结论。首先当电机一转动一周即为一次取投苗行程,时间为6s,一分钟内投苗十次,共计栽植120株秧苗,即为高速移栽。此曲线最大的特点就是在秧盘斜向下运动与取苗手的前后直线以及旋转运动的合成,这样可以避免取苗手与秧盘的碰撞,并且在秧盘间歇性运动的时间间隔内便可以将秧苗从钵盘中取出。此曲线大大减小取苗手的上下震动,直线运动与旋转运动都到达投苗点时速度均为零,取苗手打开是在停止后的瞬间,这样秧苗下落时是垂直于接苗器,这样可以保证秧苗竖直进入导苗管,从而减少对图钵苗的破坏,加强对根系的保护,确保有效栽植。
Pro/E与其他三维软件联合仿真
Pro/E与Adams联合仿真
Adams中建立非常复杂的模型比较困难,因为Adams一般进行的仿真都是简化的结构,只考虑输入输出形式而中间细节过程简化,用较为简单的结构代替复杂的结构,这样许多学者均发现如此仿真的结果与实际有一定的差距。因此有了一些软件的数据接口可以与其联合仿真。这样使他们的兼容性增大,在仿真上达到互补的效果。Pro/E有这样的数据接口,当我们建立完成三维设计之后将其保存副本为.x_ t格式的文件后,Adams既可以实现他们的数据交互。这样降低了三维设计的难度,增强了仿真的可靠性。联合仿真弥补了Pro/E的柔体仿真的缺陷,提高了Adams的仿真效率。
Pro/E与PFC3D联合仿真
在PFC3D中进行仿真时,无论是墙还是球都需要计算大量的坐标或者复杂的程序来完成,但如果我们在仿真之前在Pro/E中将三维模型创建完,然后在PFC3D直接导入后为其书写地址分配函数即可,这样求墙都具有独立的地址或者地址段,从而可以直接为其编写仿真函数,使仿真过程按预先指定的过程进行。模拟真实环境下的运动形式,进而得到我想要获得测量值以及仿真过程。这样联合仿真减少了程序设计量的编写以及大量的空间点坐标的计算,还有降低了对计算机计算速度的要求。
结语
Pro/E强大的三维设计功能受到广大科研工作者的青睐,为机械结构设计带来了很大的方便,也为机械加工方面做出了卓越的贡献,其不可想象的兼容性为联合仿真创造了更为优越的条件。希望以后Pro/E可以开发出更多的功能,比如开发出与Design-Expert 兼容的数据接口,将仿真试验数据直接进行正交试验等,从而使机械设计虚拟实验与优化设计更为方便。
DOI:10.3969/j.issn.1001- 8972.2016.13.021
猜你喜欢
农业工程技术(2022年1期)2022-04-19
运输经理世界(2021年2期)2021-03-06
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
建材发展导向(2019年22期)2019-12-09
诗潮(2019年1期)2019-01-25
现代装饰(2018年5期)2018-05-26
中小企业管理与科技(2018年23期)2018-02-07
中国三峡(2017年2期)2017-06-09
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01