
基于H∞回路成形法的磁轴承鲁棒控制器设计
2016-07-27 02:48孟鹏飞张广明欧阳慧珉
轴承 2016年4期
孟鹏飞,张广明,欧阳慧珉
(南京工业大学 电气工程与控制科学学院,南京 211816)
磁轴承因无磨损、无润滑、高转速、能适应苛刻环境等特点,广泛应用于医疗、高精密度机械制造、真空和洁净空间系统等领域。然而,其多变量、非线性、强耦合等特点使得系统控制器设计成为长期研究的热点和难点。
目前为止,国内外专家学者已经提出了多种控制策略。文献[1]分析了磁轴承的PID控制中系统超调的原因,提出引入提前重置PID控制。文献[2]通过使用Lyapunov函数方法、线性矩阵不等式(LMI)方法和并行分布补偿(PDC)方法,导出了相应的稳定性条件及H∞控制器的设计方法。文献[3]在考虑模型的不确定性和外界干扰的情况下设计了系统的H∞控制器,提出了H∞回路成形设计方法,该方法可以通过在控制器中引入第2个自由度,并将其形式化描述为一个标准H∞优化问题而得到扩展,容许在鲁棒镇定和闭环模型匹配之间进行折衷,该结构在控制器实现方面有很多优点。文献[4]对互质因子进行了较详尽的分析,指出了互质因子摄动与系统鲁棒性间的关系。文献[5]研究一种系统化的回路成形离散控制器优化方法,有效规避离散化逼近误差的影响。已有的H∞控制在磁轴承中的应用研究方面存在以下问题:对于磁轴承模型强制解耦,没有分析其惯性耦合与陀螺效应的影响;对模型的非线性摄动估计不足,模型不够精确;多数采用H∞混合灵敏度对系统进行权函数设计,较少采用H∞回路成形法对模型进行扩展。
鉴于此,下文分析磁轴承转子运动的数学模型和其在高速运转下陀螺效应的影响,对模型进行简化和修正;采用α阶逆系统理论对模型进行线性解耦,减少惯性耦合对系统的影响;研究转子起浮时的最大非线性摄动,使磁轴承的摄动模型更加精确;在磁轴承H∞控制基础上,对原有模型进行回路成形设计,从而使鲁棒控制器的设计更加便捷有效。
1 磁悬浮系统的数学模型
1.1 系统组成及其工作原理
轴承-转子受力示意图如图1所示。fxa,fya分别为转子左端沿x,y轴受到的电磁力;fxb,fyb分别为转子右端沿x,y轴受到的电磁力;xa,ya分别为转子左端沿x,y轴方向位移;xb,yb分别为转子右端沿x,y轴方向位移;xc,yc分别为转子质心沿x,y轴方向位移;ixa,iya分别为转子左端x,y轴方向输入电流;ixb,iib分别为转子右端x,y轴方向输入电流;θx,θy分别为转子绕质心处x,y轴转角;ω为转子绕z轴转动角速度;其他相关参数见表1。
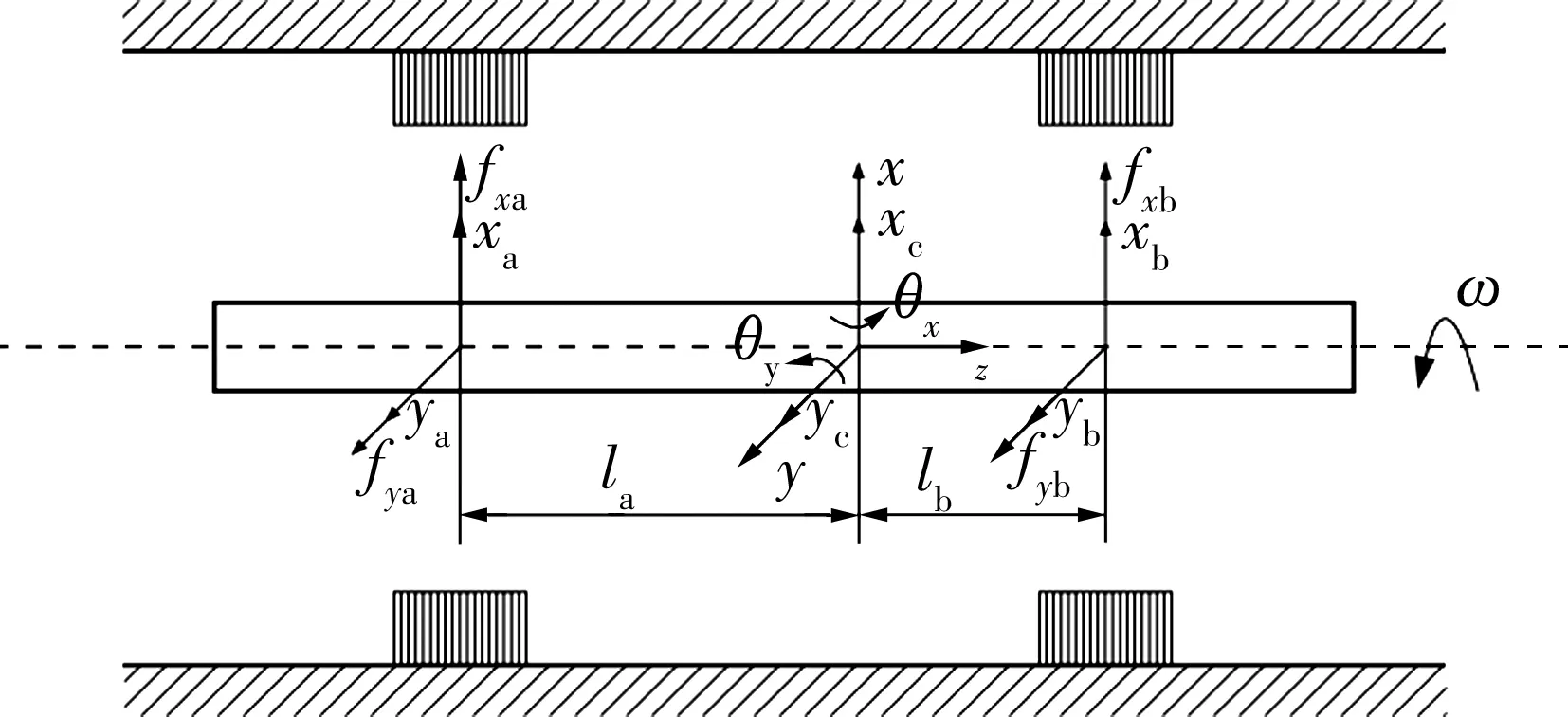
图1 轴承-转子受力示意图
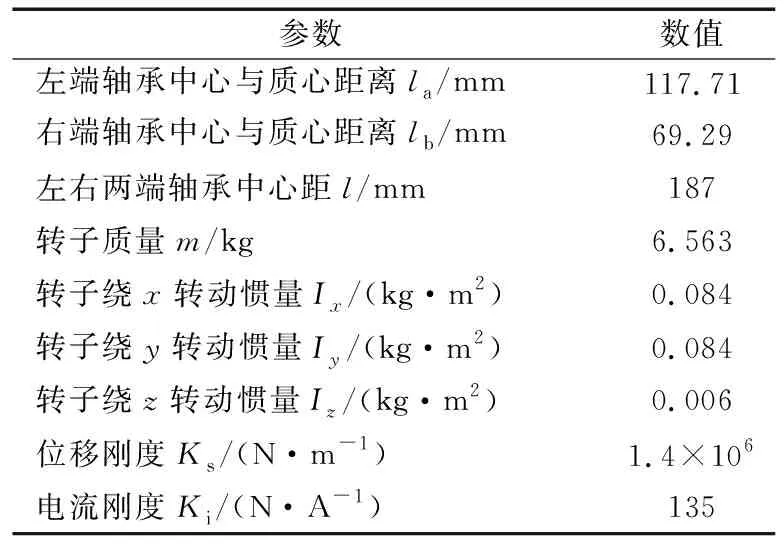
表1 轴承和转子参数
1.2 转子动力学分析
通过对转子进行动力学分析可得状态方程为
Y=CX+DU,

控制向量U= [ixa,ixb,iya,iyb]T,
输出向量Y=[xa,xb,ya,yb]T,
参数矩阵
C=[I4×4O4×4],D=[O4×4],
2 系统模型分析
2.1 系统耦合分析
根据上述未解耦的模型可以得到被控对象标称传递函数,转子转速为30 000 r/min时传递函数矩阵为
a21中的非对角元素反映的是同一平面内的2个径向自由度之间的影响,称为惯性耦合;a22反映的是磁悬浮轴承径向不同平面各自由度之间的影响,称为陀螺耦合。a22中绝对数值最大的项是94.167 8,远远小于a21中数值最小项154 763,因此惯性耦合远远大于陀螺耦合。
转子在转速为30 000 r/min时各个自由度相互作用时的频域响应如图2所示。图中G11,G22,G33,G44为系统主对角线分量,在所有频域上增益最大;G12,G21,G34,G43为同一方向不同位置间的耦合,相对主对角线元素,其在低频段的增益较小,高频段相差12 dB;G13,G31,G24,G42,G23,G32,G14,G41为不同位置不同方向之间的耦合,相对系统主对角元素,其增益较小。
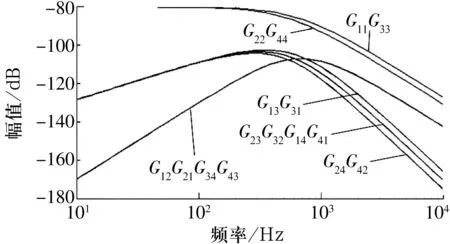
图2 转速为30 000 r/min时各自由度相互作用时的频域响应
将系统简化为径向2自由度的系统,不考虑非同一平面之间的耦合,原状态方程简化为
(1)
(2)
2.2 基于α阶逆系统理论的线性解耦
求输出Y=[ya,yb]T对时间的α阶导数,直到Y的导数中显含输入变量U。求Y的二阶导数即可显含输入变量U[6]。
(3)
根据雅克比矩阵有
(4)
因为rank(∂Y/∂U)=2 ,矩阵非奇异,所以系统可逆。按照解耦控制的要求,令参考输入为Φ=[φ1,φ2]T,则有
令
(5)
结合(3)式,可得控制律
(6)
由(6)式可得输入变换和状态反馈组成的控制律u=RΦ-FX,其中R为输入变换矩阵;F为状态反馈矩阵。解耦后的系统传递函数矩阵为
GL(s)=diag(1/s21/s2)。
(7)
解耦过程如图3所示。
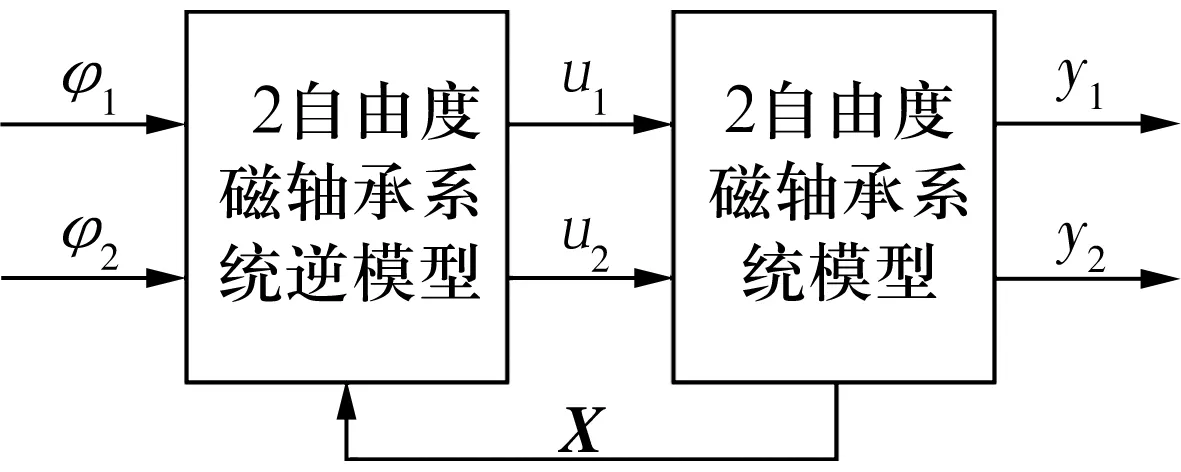
图3 2自由度磁轴承系统解耦框图
2.3 系统非线性摄动分析
系统数学模型的不确定性包括位移刚度Ks、电流刚度Ki的不确定性,以及各自由度之间的陀螺与惯性耦合引起的动态不确定性[9]。由于已对系统解耦,只考虑转子在刚起浮时产生的非线性摄动,此时非线性摄动最大。
单自由度电磁力为
(8)
K0=0.25μ0N2A,
式中:xt,it为位移、电流的实际值;μ0为真空磁导率;N为线圈匝数;A为气隙截面积。将上式在平衡位置(X0,I0)附近进行前4阶Taylor展开,忽略高阶小项可得
(9)
转子起浮时,x=0.2 mm,i=0.6 A,由参数摄动引起的乘性不确定性为
(10)
综上可得摄动模型为
。(11)
3 H∞回路成形法设计控制器
3.1 H∞回路成形法简介
H∞回路成形设计方法以结合经典H∞鲁棒镇定为基础,构造回路传递函数来满足对闭环系统的性能要求[7-9]。通过设置前置或后置补偿器对开环对象进行扩展,扩展后的系统为
Gp=W2GW1,
(12)
式中:W2,W1分别为前置、后置补偿器;G为标称对象模型。对Gp进行H∞标准最优控制,反馈控制器为
K=W1KpW2,
(13)
式中:Kp为H∞控制器。利用H∞优化技术,针对一类常见的互质因子不确定性,将得到的成形对象(初始回路形状)鲁棒化。
用互质分解描述H∞回路成形的对象。将被控系统的不确定性分为非结构不确定性和参数不确定性,考虑G的镇定问题,对其进行标准化的左互质分解
G=M-1N,
(14)
为简化,省略M和N的下标。摄动对象模型Gp可以写为
Gp=(M+ΔM)-1(N+ΔN),
(15)
式中:ΔM,ΔN为稳定但未知的传递函数,表示标称对象模型G的不确定性。鲁棒镇定的目标不仅要镇定G,还要镇定一族由下式定义的摄动对象模型
Gp={(M+ΔM)-1(N+ΔN):‖[ΔNΔM]‖∞<ε}
,(16)
式中:ε为稳定裕量,ε>0,其值最大化就是标准化互质因子对象的鲁棒镇定问题。
摄动反馈系统如图4所示,当且仅当标称反馈系统稳定,且满足下式时,其稳定性是鲁棒的,
(17)
式中:γK为由Φ到[u,y]T的H∞范数;u,y为控制器K的输出变量和输入变量;(I-GK)-1为正反馈结构的灵敏度函数;I为单位矩阵。
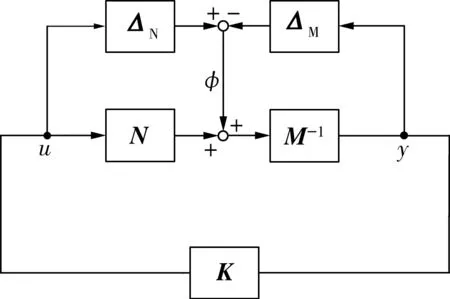
图4 摄动反馈系统
3.2 补偿器的设计
设计补偿器时期望对回路幅值特性的形状作如下修改:在低频段增大回路增益以改善系统性能。为了在具有可接受的幅值裕量GM与相角裕量PM的情况下得到较好的瞬态特性,在穿越频率附近使L(s)(L(s)=G(s)K(s))的斜率约为-1。为了减少调节输入的使用,要使L(s)在高频(带宽之后)更快衰减,使控制器可实现,并减少噪声的影响[10-12]。
标称系统与摄动系统成形前的奇异值曲线如图5所示。由图可知,被控系统在低频段增益最多达到40 dB,高频段迅速衰减,但系统在穿越0 dB时的斜率为-40 dB/dec,稳定裕量严重不足,系统处于开环不稳定状态,鲁棒性和动态性能不符合要求。因此选取积分超前环节,考虑系统的因果性和可实现性,在超前补偿器的基础上增加一阶积分环节,为了加快高频段衰减,增加“超前-滞后”项,以便在控制器上增加微分作用。经过反复试验,选取后置、前置补偿器分别为
(18)
(19)
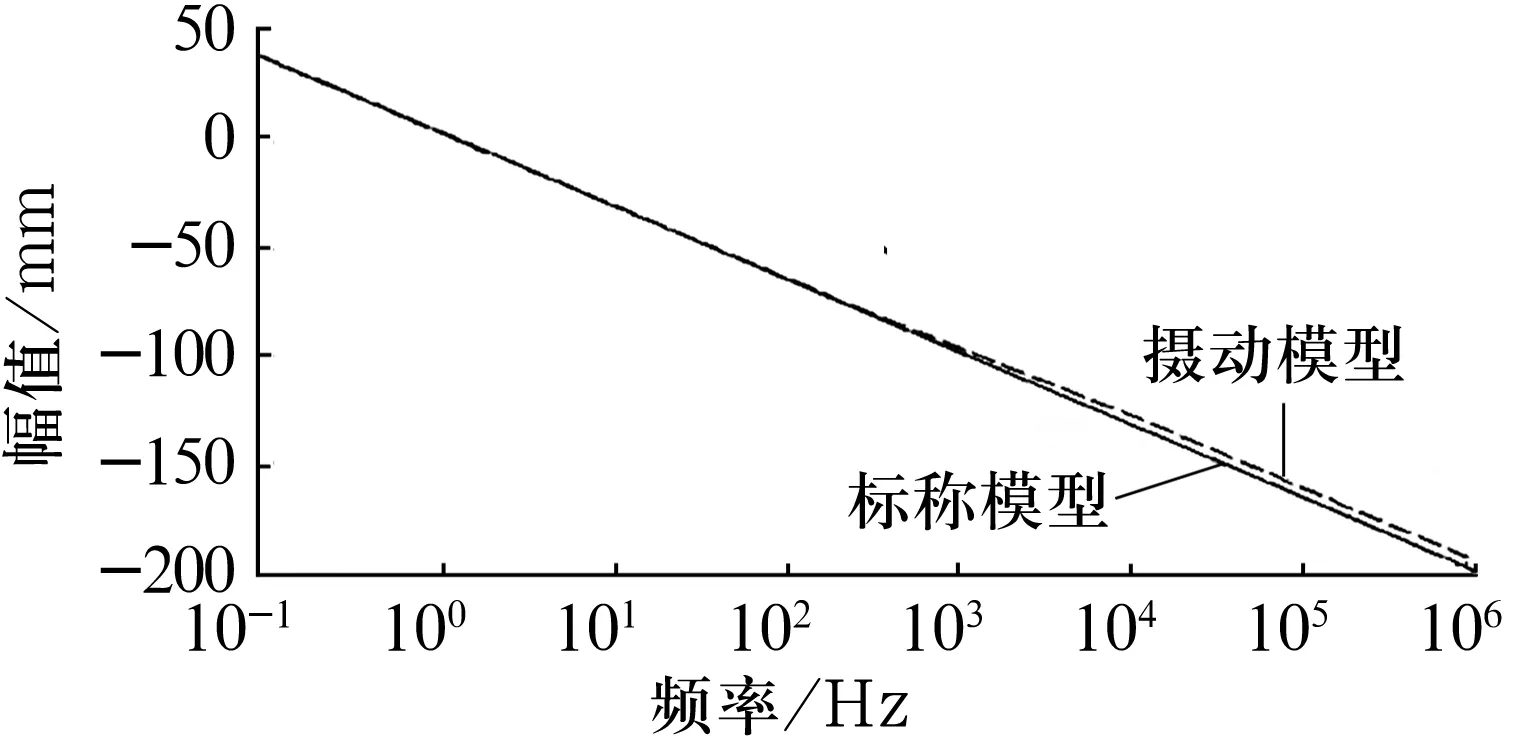
图5 标称系统与摄动系统成形前的奇异值特性曲线
回路成形前后系统奇异值特性曲线如图6所示。由图可知,系统成形后在低频段增益大于30 dB,具有较好的跟踪性能和抗干扰能力,奇异值曲线穿过0 dB时斜率为-20 dB/dec,保证了系统的稳态性能。在高频段以-60 dB/dec的斜率衰减,系统响应速度加快。GM=10,PM=48.3°,GM表示闭环系统变成不稳定系统以前回路增益可以增加的倍数,是对稳态增益不确定性(误差)的直接防护措施。典型情况下,要求GM>2;PM表示出现闭环不稳定前回路传递函数可以增加的负相位,典型情况下,要求PM>30°或者更多,因此系统达到设计要求。
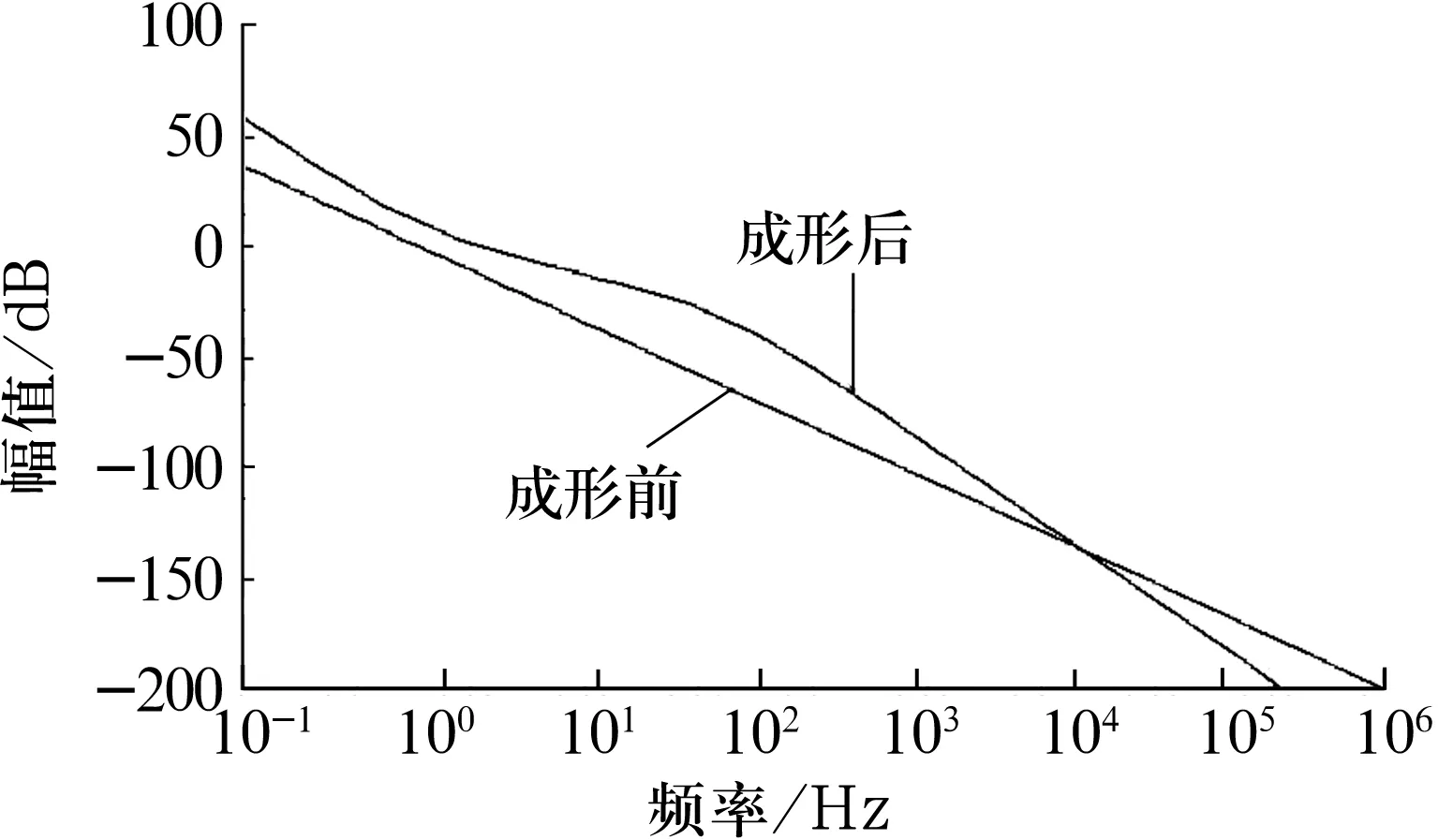
图6 回路成形前后系统奇异值特性曲线
利用MATLAB鲁棒工具箱[13],通过Loopsyn命令可以得到最终控制器,系统H∞范数γk为3.276 8。根据偶极子原理,再对15阶控制器进行pode降阶。
4 系统仿真与性能分析
设转子的初始位置x=-0.2 mm,参考位置x0=0 mm,转子由初始位置空载起浮时x方向的位移曲线如图7所示。由图可知,响应曲线较平滑,转子经30 ms后回到平衡位置,超调量小于0.03 mm,几乎无静差。
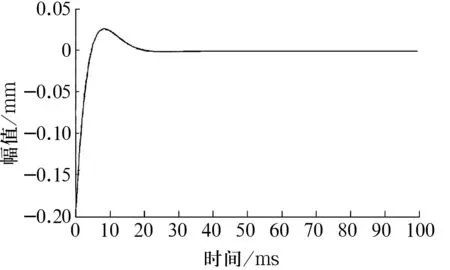
图7 转子起浮时x方向的位移曲线
转子发生最大非线性摄动时系统的阶跃响应如图8所示。由图可知,摄动模型超调0.04 mm,小于轴承保护气隙(0.1 mm),符合设计要求;系统参数发生摄动时仍能保持稳定。
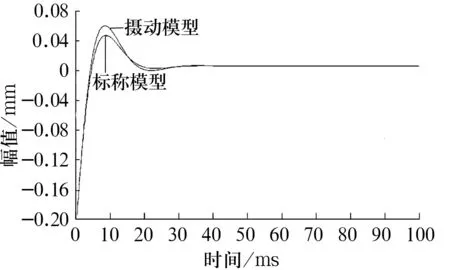
图8 转子标称模型与摄动模型的阶跃响应
转子在摄动状态下的阶跃响应和正弦响应分别如图9、图10所示。由图可知,与经典PID控制相比,H∞回路成形法的优势在于:系统输出量的最大偏差、输出量的过渡时间及振动频率较小,抗干扰能力和处理系统不确性的能力较好。
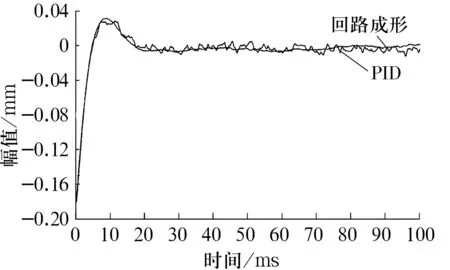
图9 摄动状态下系统的阶跃响应
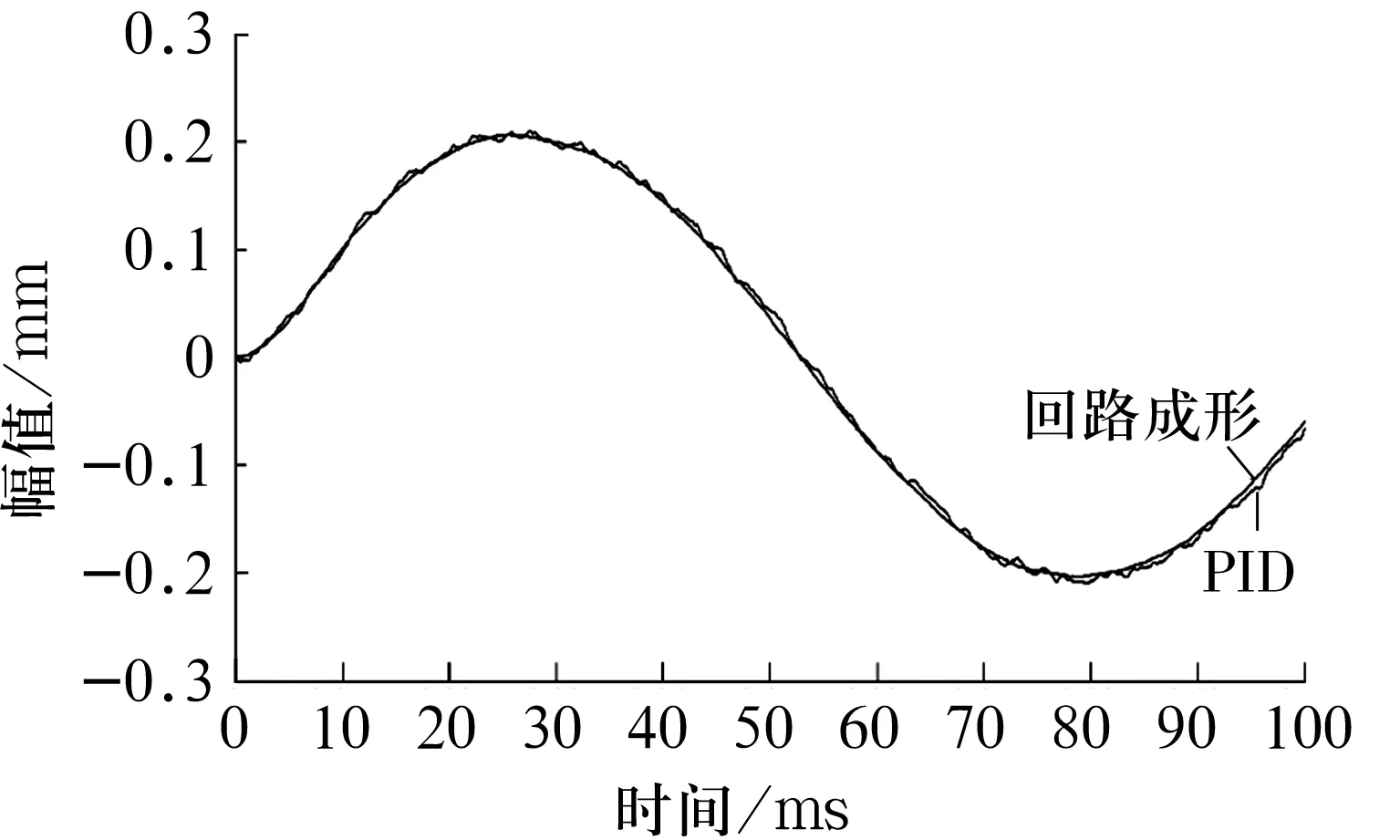
图10 摄动状态下系统的正弦响应
转子位移端受到幅值为0.04 mm、周期为0.1 s的矩形波干扰时的响应如图11所示。由图可知,系统在30 ms消除扰动干扰,具有较强的抗干扰能力。
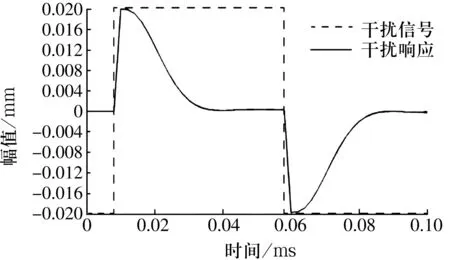
图11 转子位移端受到干扰时的响应
5 结束语
分析系统内部的惯性效应和陀螺效应,对径向4自由度磁悬浮轴承系统进行数学化建模并简化模型。采用α阶逆系统理论对系统进行线性解耦,然后对系统进行H∞回路成形设计,设计了单自由度的鲁棒控制器。通过仿真验证可知,系统受到干扰时可快速恢复稳定状态,系统在摄动状态下仍能保持良好的动态性能,证明H∞回路成形法设计的控制器对磁悬浮轴承系统中的不确定因素具有良好的鲁棒性。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
模具制造(2019年4期)2019-12-29
电子制作(2019年19期)2019-11-23
山东冶金(2019年5期)2019-11-16
电子制作(2018年19期)2018-11-14
制造技术与机床(2018年9期)2018-09-19
滇池(2017年5期)2017-05-19
河北北方学院学报(自然科学版)(2016年9期)2016-11-14
雷达学报(2016年3期)2016-10-09
成长·读写月刊(2016年5期)2016-07-10
